You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Car Rental System Project ReportDocument40 pagesCar Rental System Project Reportyetendra singh chauhan69% (208)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- KMC-950 Service ManualDocument172 pagesKMC-950 Service Manualdavid100% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Drilling Rig Operations & A To Z Rotary Drilling Rig ComponentsDocument130 pagesDrilling Rig Operations & A To Z Rotary Drilling Rig ComponentsAhmad93% (28)
- (ICPC 2017) Bug Localization With Combination of Deep Learning and Information RetrievalDocument12 pages(ICPC 2017) Bug Localization With Combination of Deep Learning and Information RetrievalAnh Nguyễn ĐứcNo ratings yet
- Adaptive Channel Modeling For MIMO Wireless Communications: Chengjin Zhang Robert R. BitmeadDocument5 pagesAdaptive Channel Modeling For MIMO Wireless Communications: Chengjin Zhang Robert R. Bitmeadmeng_20017572No ratings yet
- Women Konjit DebelaDocument62 pagesWomen Konjit Debelameng_20017572100% (1)
- l10k Amhara MapDocument1 pagel10k Amhara Mapmeng_20017572100% (1)
- Channel Mapp of OrpDocument1 pageChannel Mapp of Orpmeng_20017572No ratings yet
- Installation InstructionsDocument2 pagesInstallation InstructionsSebastian BryceNo ratings yet
- Experiment No. 13: Objective: To Investigate The Use of JFET As A Constant Current Source & As Chopper ApparatusDocument3 pagesExperiment No. 13: Objective: To Investigate The Use of JFET As A Constant Current Source & As Chopper ApparatusUsama SagharNo ratings yet
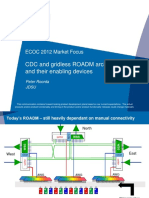
- JDSU ECOC 2012 Market Focus (CDC and Gridless)Document14 pagesJDSU ECOC 2012 Market Focus (CDC and Gridless)Jennie KimNo ratings yet
- PapernathazDocument26 pagesPapernathazAbelardo LapathaNo ratings yet
- Chapter 9-Verilog Behavioral ModelingDocument55 pagesChapter 9-Verilog Behavioral ModelingThắng Lê NhựtNo ratings yet
- Template PP (Smi-Formal 1)Document25 pagesTemplate PP (Smi-Formal 1)NURANIZATUL BINTI EJOL IPG-PelajarNo ratings yet
- Ecologyand Environment 3 RdeditionDocument102 pagesEcologyand Environment 3 RdeditionTATHAGATA OJHANo ratings yet
- Amm 320 Novo-1Document23 pagesAmm 320 Novo-1gabriel eugen staminNo ratings yet
- Lista 01122021Document4 pagesLista 01122021Alvaro LopezNo ratings yet
- Ck1401 - Dual Stepper Motor Controller: Circuit DescriptionDocument6 pagesCk1401 - Dual Stepper Motor Controller: Circuit DescriptionYasir KhanNo ratings yet
- FM ExperimentDocument21 pagesFM ExperimentDeepak SinglaNo ratings yet
- Tick-Tick-TickDocument30 pagesTick-Tick-TicknagaravikrishnadiviNo ratings yet
- WCF Data Services IntroDocument20 pagesWCF Data Services IntroShakiro RuvalcabaNo ratings yet
- Harmony Control Relays - RM17TT00 PDFDocument6 pagesHarmony Control Relays - RM17TT00 PDFAnton GrozevNo ratings yet
- Binary SearchDocument5 pagesBinary SearchSuryaNo ratings yet
- Microsoft Official Course: Overview of System Center 2012 R2 Configuration ManagerDocument35 pagesMicrosoft Official Course: Overview of System Center 2012 R2 Configuration ManagerTökedli NokedliNo ratings yet
- The Micrometer: V. Ryan © 2004 - 2009Document6 pagesThe Micrometer: V. Ryan © 2004 - 2009Joseph DizonNo ratings yet
- Civil Engineering Kerala SyllabusDocument120 pagesCivil Engineering Kerala SyllabusJinu MadhavanNo ratings yet
- Solid State Physics Chapter 0Document11 pagesSolid State Physics Chapter 0Sergio NuñezNo ratings yet
- Cmtcs - Trip Circuit Supervision: 1MRS752363-MUMDocument10 pagesCmtcs - Trip Circuit Supervision: 1MRS752363-MUMhaichau199No ratings yet
- Tests of SignificanceDocument111 pagesTests of SignificanceMeerNo ratings yet
- RodamientosDocument48 pagesRodamientosArnaldo BenitezNo ratings yet
- Cm-jc-exm-009-V1 JC Chem - Topical Revision - Reaction Kinetics (2020 v2019 LT)Document72 pagesCm-jc-exm-009-V1 JC Chem - Topical Revision - Reaction Kinetics (2020 v2019 LT)George ChooNo ratings yet
- Adina InfoDocument6 pagesAdina InfoTomáš BrtníkNo ratings yet
- Remote Controller Manual PDFDocument16 pagesRemote Controller Manual PDFPacho PachangasNo ratings yet