You might also like
- New Sensors and Processing ChainFrom EverandNew Sensors and Processing ChainJean-Hugh ThomasNo ratings yet
- Structural Health MonitoringDocument11 pagesStructural Health MonitoringShubham RathodNo ratings yet
- Darmawan Analysis The Effect of Outrigger (Cadik) VariationsDocument16 pagesDarmawan Analysis The Effect of Outrigger (Cadik) Variationssarjana mudaNo ratings yet
- Ecndt2023 Presentation 88Document28 pagesEcndt2023 Presentation 88danushvs12No ratings yet
- Fixed Bed ReactorDocument63 pagesFixed Bed ReactorVishal Goswami100% (1)
- ABAQUS Technology Brief: Shock Response and Acoustic Radiation AnalysisDocument9 pagesABAQUS Technology Brief: Shock Response and Acoustic Radiation AnalysisHind PivoineNo ratings yet
- spe 124932 ms光纤应变与缠绕角度关系Document15 pagesspe 124932 ms光纤应变与缠绕角度关系su feiyuNo ratings yet
- Bank Protection: Reference ManualDocument45 pagesBank Protection: Reference ManualSwopnil KalikaNo ratings yet
- Journal Pone 0284788Document14 pagesJournal Pone 0284788Thanh DatNo ratings yet
- Manoeuvring Prediction Based On CFD Generated Derivatives: April 2016Document10 pagesManoeuvring Prediction Based On CFD Generated Derivatives: April 2016Faheem AhmedNo ratings yet
- Omae2013 10554 Draft Revised 9Document8 pagesOmae2013 10554 Draft Revised 9Mrk BrkngNo ratings yet
- Yaakob 2012Document9 pagesYaakob 2012Bill Erick CastilloNo ratings yet
- Quantitative Shape Measurement of An Inflatable Rubber Dam Using Inertial SensorsDocument5 pagesQuantitative Shape Measurement of An Inflatable Rubber Dam Using Inertial Sensorsahmadalbywr1234No ratings yet
- Arkoma TechnologyDocument9 pagesArkoma TechnologyJorge Luis Villarroel BordaNo ratings yet
- 27th Ittc Oec Final Report v7Document69 pages27th Ittc Oec Final Report v7Myo Zin AungNo ratings yet
- Bio-Inspired Surfaces and Appli - Eddie Y K NGDocument591 pagesBio-Inspired Surfaces and Appli - Eddie Y K NGChambelleNo ratings yet
- DesignandConstructionGUANAYII AUVDocument7 pagesDesignandConstructionGUANAYII AUVManh Dien HuynhNo ratings yet
- Gao2019 1Document9 pagesGao2019 1Carlos Eduardo Simoes de AlmeidaNo ratings yet
- 1 - The Development of Remotely Piloted Life Buoy - Rev3.0Document6 pages1 - The Development of Remotely Piloted Life Buoy - Rev3.0Dr Agus BudiyonoNo ratings yet
- The Structure Design of The Mini Underwater Robot: Applied Mechanics and Materials February 2013Document7 pagesThe Structure Design of The Mini Underwater Robot: Applied Mechanics and Materials February 2013Батсайхан ДугаржавNo ratings yet
- Reservoir-Simulation Lect 3Document41 pagesReservoir-Simulation Lect 3كهلان البريهيNo ratings yet
- IJRET20160515003Document4 pagesIJRET20160515003abhishek mohiteNo ratings yet
- 1 s2.0 S0029801822014731 MainDocument12 pages1 s2.0 S0029801822014731 MainJonathan ProcelNo ratings yet
- 隔水管抗反冲优化1 s2.0 S0029801823010508 mainDocument17 pages隔水管抗反冲优化1 s2.0 S0029801823010508 mainrizwanzhihaoNo ratings yet
- Measuring Stradivari Violin "Cremonese" (1715) by 3D ModelingDocument5 pagesMeasuring Stradivari Violin "Cremonese" (1715) by 3D ModelingAdriano AngelicoNo ratings yet
- Waves PDFDocument61 pagesWaves PDFNicola CasoNo ratings yet
- Sustainable Marine Structures - Volume 05 - Issue 01 - March 2023Document52 pagesSustainable Marine Structures - Volume 05 - Issue 01 - March 2023Bilingual PublishingNo ratings yet
- Visualization of The Bubble Sweep-Down Phenomenon Around The Bow of A Ship ModelDocument13 pagesVisualization of The Bubble Sweep-Down Phenomenon Around The Bow of A Ship ModelAnthonyNo ratings yet
- Ecndt2023 Paper 88Document6 pagesEcndt2023 Paper 88danushvs12No ratings yet
- Design of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)Document11 pagesDesign of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)leokareyxoxoersNo ratings yet
- Sustainability 14 01932 v2Document18 pagesSustainability 14 01932 v2JoakimNo ratings yet
- Evaluation of Stability and Seismic Analysis of Gravity Dam by Using Staad ProDocument9 pagesEvaluation of Stability and Seismic Analysis of Gravity Dam by Using Staad Promanga5No ratings yet
- Photogrammetric3Dmodellingofaboathull FinDocument9 pagesPhotogrammetric3Dmodellingofaboathull FinMjNo ratings yet
- Underwater Rov ThesisDocument4 pagesUnderwater Rov Thesisafcmayfzq100% (1)
- A Methodology For Hydro Structure Simulations Based On OpenFOAMDocument9 pagesA Methodology For Hydro Structure Simulations Based On OpenFOAMChen Chu-yunNo ratings yet
- Gantry Robot System For Preventing Drowning Accidents in SwimmingDocument7 pagesGantry Robot System For Preventing Drowning Accidents in Swimmingputra mulia rizky selianNo ratings yet
- The Application of Advanced Robotics and Sensor Technologies To The Preservation of The USS ConstitutionDocument7 pagesThe Application of Advanced Robotics and Sensor Technologies To The Preservation of The USS ConstitutionPablo Eduardo Caicedo RodríguezNo ratings yet
- A Large Scale Continuum-Discrete Numerical Modelli PDFDocument16 pagesA Large Scale Continuum-Discrete Numerical Modelli PDFmed AmineNo ratings yet
- A Large Scale Continuum-Discrete Numerical ModelliDocument16 pagesA Large Scale Continuum-Discrete Numerical Modellimed AmineNo ratings yet
- Calculation and Analysis of Sea-Fastening Support and Welding Strength of Topside ModuleDocument8 pagesCalculation and Analysis of Sea-Fastening Support and Welding Strength of Topside Modulepartha.fernandoNo ratings yet
- Verification and Validation of The Spalart-Allmaras Turbulence MoDocument79 pagesVerification and Validation of The Spalart-Allmaras Turbulence Mosimon alaffNo ratings yet
- Performance Assessment of A Planing Hull Using The Smoothed Particle Hydrodynamics MethodDocument18 pagesPerformance Assessment of A Planing Hull Using The Smoothed Particle Hydrodynamics MethodFederico CasconNo ratings yet
- A Damage Detection andDocument12 pagesA Damage Detection andGaurav Jyoti GogoiNo ratings yet
- Deep Water Mooring Systems Using Fiber RopesDocument10 pagesDeep Water Mooring Systems Using Fiber RopesSaeed JabbariNo ratings yet
- Grand Renewable 2018 MotionMooring Qualification in FloatgenDocument5 pagesGrand Renewable 2018 MotionMooring Qualification in Floatgenm1565778302No ratings yet
- BritoDocument10 pagesBritoTomás CarreiraNo ratings yet
- Plastic Cubesat An Innovative and Low-Cost Way To Perform AppliedDocument11 pagesPlastic Cubesat An Innovative and Low-Cost Way To Perform AppliedNathan PinheiroNo ratings yet
- Maccaferri Channel Design ManualDocument45 pagesMaccaferri Channel Design ManualHuy Le QuangNo ratings yet
- Edz Clusters Young cr38 - enDocument5 pagesEdz Clusters Young cr38 - enJorge Raul JjaramilloNo ratings yet
- Thrust Characteristics of Ducted Propeller and Hydrodynamics of An Underwater Vehicle in Control MotionsDocument19 pagesThrust Characteristics of Ducted Propeller and Hydrodynamics of An Underwater Vehicle in Control MotionsAnh NgoNo ratings yet
- Modular Wavemaker Design For Harbours and Ships Physical Model TestingDocument5 pagesModular Wavemaker Design For Harbours and Ships Physical Model TestingjhoengeNo ratings yet
- Monitoring of The Ultrasonic P-Wave Velocity in EaDocument4 pagesMonitoring of The Ultrasonic P-Wave Velocity in EaYouness FarezNo ratings yet
- SPE 91940 Dynamic Behavior of Discrete Fracture Network (DFN) ModelsDocument8 pagesSPE 91940 Dynamic Behavior of Discrete Fracture Network (DFN) Modelscarloszapata1No ratings yet
- Paper Sabria TunisiaDocument12 pagesPaper Sabria TunisiaRani Juliarini RahayuNo ratings yet
- Contour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorDocument6 pagesContour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorGuilherme OliveiraNo ratings yet
- SPE 59045 Fractured Reservoirs: An Integrated ApproachDocument7 pagesSPE 59045 Fractured Reservoirs: An Integrated ApproachDr-Jitendra VaishNo ratings yet
- Volume IIDocument246 pagesVolume IIathanasios niotisNo ratings yet
- Mooring PublicationDocument11 pagesMooring PublicationNinad Anil Bhaskarwar oe21m012No ratings yet
- Design and Modeling of RC SubmarineDocument5 pagesDesign and Modeling of RC SubmarineMousa AklNo ratings yet
- Deflection Measuringsystemfor Floating DrydocksDocument6 pagesDeflection Measuringsystemfor Floating DrydocksGermán AguirrezabalaNo ratings yet
- Aucet 2017 BrochureDocument18 pagesAucet 2017 BrochureNEELIMANo ratings yet
- Electron Beam MachiningDocument27 pagesElectron Beam MachiningBabbu MehraNo ratings yet
- Book Chapter - Measuring Surface Tension and Free Surfce EnergyDocument13 pagesBook Chapter - Measuring Surface Tension and Free Surfce EnergyIhlas AhamedNo ratings yet
- Engineering Electromagnetics 8th Edition Hayt Solutions ManualDocument15 pagesEngineering Electromagnetics 8th Edition Hayt Solutions Manualreginasellersxsygkmfczw100% (11)
- Algebra:: N N N N N N 1B 2B ZoneDocument6 pagesAlgebra:: N N N N N N 1B 2B Zonevenedick sapongayNo ratings yet
- Arduino Based 3D Trilatration SystemDocument4 pagesArduino Based 3D Trilatration SystemAdekunle GbadeboNo ratings yet
- Skinner's Key To The Hebrew-Egyptian Mystery (1875)Document405 pagesSkinner's Key To The Hebrew-Egyptian Mystery (1875)Jesse FaulknerNo ratings yet
- UPCAT Reviewer: GeometryDocument23 pagesUPCAT Reviewer: GeometryMary Ann Medel100% (2)
- Lecture 5: Triangulation Adjustment Triangulation: in This Lecture We Focus On The Second MethodDocument5 pagesLecture 5: Triangulation Adjustment Triangulation: in This Lecture We Focus On The Second MethodXogr BargarayNo ratings yet
- Geometry Exam QuestionDocument3 pagesGeometry Exam QuestionAnwar Hosen OntorNo ratings yet
- General Aptitude Shortcuts and ForumulasDocument6 pagesGeneral Aptitude Shortcuts and ForumulasDINESHNo ratings yet
- Collision Detection EllipseDocument20 pagesCollision Detection EllipsemasharecoNo ratings yet
- PSI AP Physics C - Gauss's Law Multiple Choice QuestionsDocument7 pagesPSI AP Physics C - Gauss's Law Multiple Choice Questionsanthony solorzanoNo ratings yet
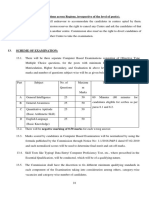
- SSC Selection Post Phase 9 Syllabus PDFDocument5 pagesSSC Selection Post Phase 9 Syllabus PDFAlex RaphyNo ratings yet
- Selected Ch25Document9 pagesSelected Ch25calculolo254255282No ratings yet
- Computing VolumesDocument18 pagesComputing VolumeskiranNo ratings yet
- Maths1b Model Papers (1) 2020Document56 pagesMaths1b Model Papers (1) 2020LC groupsNo ratings yet
- Astronomy 2020Document31 pagesAstronomy 2020Jacqui JuanNo ratings yet
- Trees and Streams - The Efficiency of Branching PatternsDocument16 pagesTrees and Streams - The Efficiency of Branching PatternsgeoecologistNo ratings yet
- General Physics 2: Electric Flux and Gauss's LawDocument8 pagesGeneral Physics 2: Electric Flux and Gauss's LawMarlon TrinidadNo ratings yet
- 1 PUC Manual-17Document22 pages1 PUC Manual-17shyla100% (1)
- Volume of 3D Shapes - AdvancedDocument5 pagesVolume of 3D Shapes - AdvancedTrúc HồNo ratings yet
- Area & VolumeDocument15 pagesArea & VolumeParthasarathi H RNo ratings yet
- Chapter Three: 3.2 Legendre Equation and Legendre PolynomialsDocument73 pagesChapter Three: 3.2 Legendre Equation and Legendre PolynomialsPatrick SibandaNo ratings yet
- Uil Calc App Word Problem Geometryprb Website2Document45 pagesUil Calc App Word Problem Geometryprb Website2api-520749996No ratings yet
- Ch.21 - Navigational Mathematics PDFDocument12 pagesCh.21 - Navigational Mathematics PDFBechir SamyrNo ratings yet
- Pressure Vessel Design Excel Sheet Basic Designing Non Critical PDocument1 pagePressure Vessel Design Excel Sheet Basic Designing Non Critical PSagarNo ratings yet
- Test Bank For Accounting Information Systems 11th Edition by BodnarDocument36 pagesTest Bank For Accounting Information Systems 11th Edition by Bodnarwartlessostmenew5xa2100% (31)
- Elements of Electromagnetics Third Edition E Book Chapter 02Document25 pagesElements of Electromagnetics Third Edition E Book Chapter 02Yepuru ChaithanyaNo ratings yet
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Product Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesFrom EverandProduct Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesRating: 4 out of 5 stars4/5 (4)
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- FreeCAD | Design Projects: Design advanced CAD models step by stepFrom EverandFreeCAD | Design Projects: Design advanced CAD models step by stepRating: 5 out of 5 stars5/5 (1)