You might also like
- Lecture1 PDFDocument37 pagesLecture1 PDFmajesticdharma1985No ratings yet
- Satellite and Terrestrial Radio Positioning Techniques: A Signal Processing PerspectiveFrom EverandSatellite and Terrestrial Radio Positioning Techniques: A Signal Processing PerspectiveRating: 5 out of 5 stars5/5 (1)
- Monte Carlo Localisation For Mobile Robots: 31st of May, 2006Document16 pagesMonte Carlo Localisation For Mobile Robots: 31st of May, 2006api-19505025No ratings yet
- ShaPo MultiMat2017 Slides PDFDocument44 pagesShaPo MultiMat2017 Slides PDFKristi GonzalesNo ratings yet
- Robotics and Sensor Networks:: Coverage, Localization and Mobility Kostas BekrisDocument35 pagesRobotics and Sensor Networks:: Coverage, Localization and Mobility Kostas Bekrisharikiran3285No ratings yet
- Principles of Robot Autonomy I: Graph Search Motion PlanningDocument33 pagesPrinciples of Robot Autonomy I: Graph Search Motion PlanningratjerryNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- Robot Lab Path PlanningDocument94 pagesRobot Lab Path PlanningKevin CarvalhoNo ratings yet
- Bitbots: Simple Robots Solving Complex Tasks: Anna Yershova Benjam in Tovar Robert Ghrist Steven M. LavalleDocument6 pagesBitbots: Simple Robots Solving Complex Tasks: Anna Yershova Benjam in Tovar Robert Ghrist Steven M. LavalleSteve LaValleNo ratings yet
- Motion Planning & Robot PlanningDocument98 pagesMotion Planning & Robot PlanningAshNo ratings yet
- CS 525 Advanced Distributed Systems Spring 2010: Ravenshaw Management Centre, CuttackDocument27 pagesCS 525 Advanced Distributed Systems Spring 2010: Ravenshaw Management Centre, CuttackRaj MaanaNo ratings yet
- Technical Aptitude Questions EbookDocument175 pagesTechnical Aptitude Questions EbookpandeysharadNo ratings yet
- Kinodynamic Path Planning: Aisha Walcott, Nathan Ickes, Stanislav FuniakDocument52 pagesKinodynamic Path Planning: Aisha Walcott, Nathan Ickes, Stanislav FuniakAnonymous UqsAfiNo ratings yet
- Coordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchDocument32 pagesCoordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchjayaheNo ratings yet
- Autonomous Mobile Robot Navigation Algorithm For Planning Collision-Free Path Designed in Dynamic EnvironmentsDocument6 pagesAutonomous Mobile Robot Navigation Algorithm For Planning Collision-Free Path Designed in Dynamic EnvironmentskishorevennelaNo ratings yet
- Big Data Analytics - Sgtrategy and RoadmapDocument31 pagesBig Data Analytics - Sgtrategy and RoadmapFabian MatteucciNo ratings yet
- Terrain Analysis Using Digital Elevation Models (TauDEMDocument49 pagesTerrain Analysis Using Digital Elevation Models (TauDEMrovallecNo ratings yet
- Smooth Path Planning in Constrained Environments: Martin Rufli Dave Ferguson Roland SiegwartDocument6 pagesSmooth Path Planning in Constrained Environments: Martin Rufli Dave Ferguson Roland SiegwartTales MarquesNo ratings yet
- Robotics: Lecture 1: Introduction To RoboticsDocument43 pagesRobotics: Lecture 1: Introduction To Roboticsnguyễn công nghĩaNo ratings yet
- Crafted Design TDD Emergent ArchitectureDocument82 pagesCrafted Design TDD Emergent ArchitectureAlexandru MormeciNo ratings yet
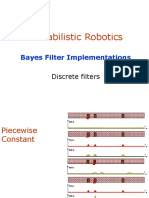
- Discrete FiltersDocument11 pagesDiscrete Filtersmujtabaiftikhar156No ratings yet
- Deep GaitDocument8 pagesDeep GaitGhanshyam s.nairNo ratings yet
- Lecture Week2 2021 Cobot Basic ConceptsDocument33 pagesLecture Week2 2021 Cobot Basic ConceptsPaulo SantosNo ratings yet
- Mobile Robots Guide FunctionsDocument7 pagesMobile Robots Guide FunctionsJavier CastilloNo ratings yet
- Obstacle Avoidance: Local Map Independent TaskDocument13 pagesObstacle Avoidance: Local Map Independent Taskjack2423No ratings yet
- Crocotta Research & Development LTD: "Be Ambitious of Climbing Up To The Difficult, in A Manner Inaccessible... "Document24 pagesCrocotta Research & Development LTD: "Be Ambitious of Climbing Up To The Difficult, in A Manner Inaccessible... "Robert SugarNo ratings yet
- Robotics: Lecture 1: Introduction To RoboticsDocument44 pagesRobotics: Lecture 1: Introduction To RoboticsRegino BetongNo ratings yet
- FPGA Implementation of Sine and Cosine Value Generators Using Cordic Algorithm For Satellite Attitude Determination and CalculatorsDocument5 pagesFPGA Implementation of Sine and Cosine Value Generators Using Cordic Algorithm For Satellite Attitude Determination and CalculatorsMohamed GanounNo ratings yet
- Probabilistic Robotics: Bayes Filter ImplementationsDocument11 pagesProbabilistic Robotics: Bayes Filter ImplementationsRogers SureNo ratings yet
- Caf From Up CSC 01 Carlson BDocument19 pagesCaf From Up CSC 01 Carlson BLava SatNo ratings yet
- D Lite: Sven Koenig Maxim LikhachevDocument8 pagesD Lite: Sven Koenig Maxim Likhachevnasi_balapNo ratings yet
- Iot Par Satellite: Travaux Pratiques: Orbites Et Positionnement Du SatelliteDocument5 pagesIot Par Satellite: Travaux Pratiques: Orbites Et Positionnement Du Satellitetest testNo ratings yet
- Lecture 3-Covering ProblemsDocument34 pagesLecture 3-Covering ProblemsFandi AfrizalNo ratings yet
- TerrainDocument7 pagesTerrainiglobrothersNo ratings yet
- Technical Aptitude QuestionsDocument175 pagesTechnical Aptitude QuestionssrgperumalNo ratings yet
- Robotics MotionDocument29 pagesRobotics MotionfenixnomahotmailcomNo ratings yet
- Qualcomm Client Interview Question - Downlaod VLSI FOR ALLDocument18 pagesQualcomm Client Interview Question - Downlaod VLSI FOR ALLPrajwal SNo ratings yet
- SPATIAL ANALYSIS OF MASSACHUSETTS NEIGHBORHOODSDocument10 pagesSPATIAL ANALYSIS OF MASSACHUSETTS NEIGHBORHOODSfarah salsabillaNo ratings yet
- Lecture 1 - Introduction PDFDocument46 pagesLecture 1 - Introduction PDFFlaMe Welcome ツNo ratings yet
- Incremental Reconstruction of Generalized Voronoi Diagrams On GridsDocument10 pagesIncremental Reconstruction of Generalized Voronoi Diagrams On GridsJohn KingNo ratings yet
- Particle Filters for Robot LocalizationDocument15 pagesParticle Filters for Robot LocalizationKhaoulaMaatougNo ratings yet
- TARE: A Hierarchical Framework For Efficiently Exploring Complex 3D EnvironmentsDocument9 pagesTARE: A Hierarchical Framework For Efficiently Exploring Complex 3D Environments张耀伦No ratings yet
- Base PapDocument6 pagesBase PapAnonymous ovq7UE2WzNo ratings yet
- Lab Assignment 1 - Dual Cobot Assembly TaskDocument4 pagesLab Assignment 1 - Dual Cobot Assembly TaskNg ChrisNo ratings yet
- Introduction To Cloud ComputingDocument34 pagesIntroduction To Cloud ComputingPriSimNo ratings yet
- Assignmt 1Document9 pagesAssignmt 1lawac3No ratings yet
- VLSI PD Question BankDocument26 pagesVLSI PD Question BankSparkIntellect100% (1)
- Classical Planning Algorithms and TechniquesDocument25 pagesClassical Planning Algorithms and Techniques朝崴No ratings yet
- 2005 Path Planning Protocol For Collaborative Multi-Robot SystemsDocument6 pages2005 Path Planning Protocol For Collaborative Multi-Robot SystemsEx6TenZNo ratings yet
- Soal Test Robotika 5ELB MekatronikaDocument6 pagesSoal Test Robotika 5ELB MekatronikaYudhaNo ratings yet
- 2223 CSC14003 21CLC0607 HW01 SolutionDocument5 pages2223 CSC14003 21CLC0607 HW01 SolutionPhước Sang DươngNo ratings yet
- Technical Aptitude Questions EbookDocument175 pagesTechnical Aptitude Questions EbookSanyam RastogiNo ratings yet
- Thesis JcuDocument8 pagesThesis Jcubsdy4ahp100% (2)
- Robot Lab Path PlanningDocument94 pagesRobot Lab Path Planningcesar.arismendi615No ratings yet
- Module 01 - IntroductionDocument37 pagesModule 01 - Introductionneelesh2k5No ratings yet
- Reinforcement Learning Environment OverviewDocument7 pagesReinforcement Learning Environment Overviewazad Tech20No ratings yet
- Mae 493G, Cpe 493M, Mobile Robotics: 11. Introduction To Robot PlanningDocument24 pagesMae 493G, Cpe 493M, Mobile Robotics: 11. Introduction To Robot PlanningGunjan KhutNo ratings yet
- Lifting The Curse of Dimensionality: Frances Y. Kuo and Ian H. SloanDocument9 pagesLifting The Curse of Dimensionality: Frances Y. Kuo and Ian H. SloanaraukalNo ratings yet
- Routing in Leo-Based Satellite Networks: Periodicity Is High. The Constellation Periodicity IsDocument6 pagesRouting in Leo-Based Satellite Networks: Periodicity Is High. The Constellation Periodicity IsCarlosRivasNo ratings yet
- Improvement in Mechanical Properties of Standard 1Document8 pagesImprovement in Mechanical Properties of Standard 1Karthik RaoNo ratings yet
- Laser Beam Welds of 15CDV6 SteelDocument4 pagesLaser Beam Welds of 15CDV6 SteelKarthik RaoNo ratings yet
- FailsafeDocument4 pagesFailsafearkan1976No ratings yet
- NASA-STD-6001B W Change 2 - Admin ChangeDocument158 pagesNASA-STD-6001B W Change 2 - Admin ChangeKarthik RaoNo ratings yet
- Apollo Experience Report Spacecraft Structural Windows: Nasa Technical NoteDocument24 pagesApollo Experience Report Spacecraft Structural Windows: Nasa Technical NoteKarthik RaoNo ratings yet
- Basic Knowledge Safety Valves enDocument7 pagesBasic Knowledge Safety Valves enKarthik RaoNo ratings yet
- Steelmaking and Refining - Introduction To ChemistryDocument8 pagesSteelmaking and Refining - Introduction To ChemistryKarthik RaoNo ratings yet
- Control Valves: Types, Characteristics and EffectivenessDocument11 pagesControl Valves: Types, Characteristics and EffectivenessHitesh MittalNo ratings yet
- Chap 13Document57 pagesChap 13mahawebNo ratings yet
- A Design Methodology of Digital Control System For MEMS Gyroscope Based On Multi-Objective Parameter OptimizationDocument16 pagesA Design Methodology of Digital Control System For MEMS Gyroscope Based On Multi-Objective Parameter OptimizationKarthik RaoNo ratings yet
- Stoken Vogel ReviewDocument5 pagesStoken Vogel ReviewKarthik RaoNo ratings yet
- Phase 2-Three PDFDocument2 pagesPhase 2-Three PDFKarthik RaoNo ratings yet
- ME Lab Performance TestsDocument1 pageME Lab Performance TestsKarthik RaoNo ratings yet
- Knowledge-Based Design of Self-Healing NanolaminatesDocument1 pageKnowledge-Based Design of Self-Healing NanolaminatesKarthik RaoNo ratings yet
- Toefl Reading Practice With AnswersDocument142 pagesToefl Reading Practice With AnswersOs DC100% (6)
- Manufacturing Process-2 PDFDocument290 pagesManufacturing Process-2 PDFKarthik RaoNo ratings yet
- Developtment and Operative Performance Analyses of The: Modular Rover Chassis Platform (MRCP)Document8 pagesDeveloptment and Operative Performance Analyses of The: Modular Rover Chassis Platform (MRCP)Karthik RaoNo ratings yet
- Design Criteria of Huang and YangDocument9 pagesDesign Criteria of Huang and YangKarthik RaoNo ratings yet
- JournalDocument2 pagesJournalKarthik RaoNo ratings yet
- Product Design - Book: January 2001Document6 pagesProduct Design - Book: January 2001Karthik RaoNo ratings yet
- V Beam BasicDocument5 pagesV Beam BasicKarthik RaoNo ratings yet
- Water Usage in The Semiconductor IndustryDocument22 pagesWater Usage in The Semiconductor IndustryKarthik RaoNo ratings yet
- VoronoiDocument11 pagesVoronoiKarthik RaoNo ratings yet
- Development of All Metal Electrothermal Actuator and Its ApplicationsDocument10 pagesDevelopment of All Metal Electrothermal Actuator and Its ApplicationsKarthik RaoNo ratings yet
- PCB-integrated Metallic Thermal Micro-Actuators: Eniko T. Enikov, Kalin LazarovDocument7 pagesPCB-integrated Metallic Thermal Micro-Actuators: Eniko T. Enikov, Kalin LazarovKarthik RaoNo ratings yet
- J97JMR SafvanDocument7 pagesJ97JMR SafvanKarthik RaoNo ratings yet
- Lesson On Packed Scrubbers TechnologyDocument20 pagesLesson On Packed Scrubbers TechnologyWONG TSNo ratings yet
- Solved With COMSOL Multiphysics 5.1 JoulDocument10 pagesSolved With COMSOL Multiphysics 5.1 JoulKarthik RaoNo ratings yet
- Lesson On Packed Scrubbers TechnologyDocument20 pagesLesson On Packed Scrubbers TechnologyWONG TSNo ratings yet
- Boot Menu and ROS Core ChangesDocument4 pagesBoot Menu and ROS Core ChangesShahrzad GhasemiNo ratings yet
- Bveeta Mini Jetson Technical DescriptionDocument3 pagesBveeta Mini Jetson Technical DescriptionM Zulqarnain ZainuddinNo ratings yet
- Handling Events of Page: "#Vueapp"Document12 pagesHandling Events of Page: "#Vueapp"IMRAN ALI (Father Name:RAZIQUE DINO)No ratings yet
- ROS Framework Guide for Building Robotic SystemsDocument12 pagesROS Framework Guide for Building Robotic SystemsSneha RoyNo ratings yet
- Integrating ROS and MATLABDocument3 pagesIntegrating ROS and MATLABAlessioHrNo ratings yet
- Learning Robotics Using PythonDocument329 pagesLearning Robotics Using PythonJULIÁN ANDRES LÓPEZ RODRÍGUEZ100% (1)
- Nature Versus Machine 2022Document10 pagesNature Versus Machine 2022Derfel CardanNo ratings yet
- Differential Drive Control ModuleDocument23 pagesDifferential Drive Control ModuleSanidhya GargNo ratings yet
- IITK IGVC Design Report SummaryDocument16 pagesIITK IGVC Design Report SummaryPrashant446No ratings yet
- Mastering ROS For Robotics Programming - Sample ChapterDocument65 pagesMastering ROS For Robotics Programming - Sample ChapterPackt PublishingNo ratings yet
- Internship Automatic Code Generation Aadl To ROS 2023Document2 pagesInternship Automatic Code Generation Aadl To ROS 2023Foaud AzarNo ratings yet
- Ros Control An Overview PDFDocument123 pagesRos Control An Overview PDFPepe ViyuelaNo ratings yet
- ReportDocument22 pagesReportkaran patelNo ratings yet
- Launch multiple ROS 2 nodes with parameters and RViz configDocument34 pagesLaunch multiple ROS 2 nodes with parameters and RViz configArjun MeghanathanNo ratings yet
- Building A Legged Robot With Ros: Case Study by AnyboticsDocument38 pagesBuilding A Legged Robot With Ros: Case Study by AnyboticsLucas HarimNo ratings yet
- Immersive Robotic Telepresence For Remote Educational ScenariosDocument21 pagesImmersive Robotic Telepresence For Remote Educational ScenariosbscnioewnfwoeiNo ratings yet
- Experiment 9: Designing a two-wheel line following robot in CoppeliasimDocument6 pagesExperiment 9: Designing a two-wheel line following robot in CoppeliasimjksnkjNo ratings yet
- IMSE-7139 Cyber Physical Systems: Prof. Ning XiDocument20 pagesIMSE-7139 Cyber Physical Systems: Prof. Ning XiHaonan WANGNo ratings yet
- Pidrone: An Autonomous Educational Drone Using Raspberry Pi and PythonDocument7 pagesPidrone: An Autonomous Educational Drone Using Raspberry Pi and PythonZaki YuandaNo ratings yet
- Industrial Training Master Readthedocs Io en LatestDocument186 pagesIndustrial Training Master Readthedocs Io en LatestC0oLd zzzNo ratings yet
- ROS Robot Programming enDocument487 pagesROS Robot Programming enMd Ahmed100% (7)
- Automated Driving With Matlab and SimulinkDocument51 pagesAutomated Driving With Matlab and Simulinkramesh gondilNo ratings yet
- Service Oriented Computing in RoboticDocument14 pagesService Oriented Computing in RoboticDaredevils MarvelNo ratings yet
- Project Report: Mte-405L Robotics Lab, 7 Semester, Fall 2020Document17 pagesProject Report: Mte-405L Robotics Lab, 7 Semester, Fall 2020Abdul Moiz QarniNo ratings yet
- Understanding Nodes - ROS 2 Documentation - Humble DocumentationDocument6 pagesUnderstanding Nodes - ROS 2 Documentation - Humble DocumentationachainyaNo ratings yet
- Modeling A Universal Robot Arm (UR 5) With Parallel Gripper To Assist Disabled PeopleDocument56 pagesModeling A Universal Robot Arm (UR 5) With Parallel Gripper To Assist Disabled PeopleGuilherme HenriqueNo ratings yet
- Development of Autonomous Manoeuvres in A QuadcopterDocument108 pagesDevelopment of Autonomous Manoeuvres in A Quadcoptermarcsure100% (1)
- Establishing Remote Networks For ROS Applications Via Port Forwarding: A Detailed TutorialDocument13 pagesEstablishing Remote Networks For ROS Applications Via Port Forwarding: A Detailed TutorialDavut Can AkbaşNo ratings yet
- An Open-Source Framework For Last Mile Delivery With Heterogeneous RobotsDocument6 pagesAn Open-Source Framework For Last Mile Delivery With Heterogeneous RobotsLuis SentisNo ratings yet
- Design and Implementation of A Robotic Arm Using Ros and Moveit!Document6 pagesDesign and Implementation of A Robotic Arm Using Ros and Moveit!NIKHIL SHINDENo ratings yet