You might also like
- 200 Series Service Manual FLX200 & SCR200Document39 pages200 Series Service Manual FLX200 & SCR200Carlos Gomez100% (3)
- TabiDocument4 pagesTabiconfused597No ratings yet
- Womens BrannockDocument3 pagesWomens BrannockJohn EvansNo ratings yet
- Glass Quality Standards ManualDocument40 pagesGlass Quality Standards Manualhisham1958100% (1)
- Sicc Patternmakingengineering PDFDocument168 pagesSicc Patternmakingengineering PDFFran Silva100% (1)
- Calculating Frog Make Your Own Mechanical CalculaDocument6 pagesCalculating Frog Make Your Own Mechanical Calculaabanso100% (1)
- Materials Requirement For Making Insole: Texon Board/ Insole Board/fiber Board Dimension of InsoleDocument7 pagesMaterials Requirement For Making Insole: Texon Board/ Insole Board/fiber Board Dimension of InsoleAde ManNo ratings yet
- Usm 2Document4 pagesUsm 2Andrés BurbanoNo ratings yet
- Opanka Hand Stitch Construction PPDocument24 pagesOpanka Hand Stitch Construction PPLuis Reyes GarciaNo ratings yet
- With Delcam Crispin Shoemaker Pro You Can:: Key FeaturesDocument1 pageWith Delcam Crispin Shoemaker Pro You Can:: Key FeaturesUladzimir100% (1)
- Last MakerDocument4 pagesLast Makernohe2013No ratings yet
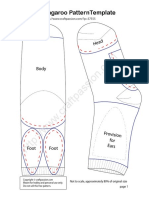
- Sock Kangaroo TemplateDocument2 pagesSock Kangaroo TemplateIvete PintoNo ratings yet
- Gm900 ManualDocument1 pageGm900 ManualborlixNo ratings yet
- Polybd Resin UrethanesDocument22 pagesPolybd Resin UrethanesborlixNo ratings yet
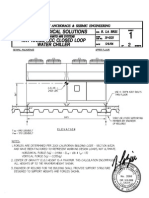
- KKT Kraus KCC 215 Closed Loop Water ChillerDocument2 pagesKKT Kraus KCC 215 Closed Loop Water ChillerborlixNo ratings yet
- Vf-Ri 8BDocument3 pagesVf-Ri 8Bveeras460% (1)
- TOSHIBA Aquilion Series - BrochureDocument11 pagesTOSHIBA Aquilion Series - BrochureIbrahim DagherNo ratings yet
- Patrones para Calzado DeportivoDocument24 pagesPatrones para Calzado DeportivoGustavo RuizNo ratings yet
- Custom Shoe Order FormDocument1 pageCustom Shoe Order FormFBM Technologies LtdNo ratings yet
- Lasting JackDocument6 pagesLasting JacknziiiNo ratings yet
- Arsutoria School Footwear Courses 2018 1Document12 pagesArsutoria School Footwear Courses 2018 1Shahriar H DiptoNo ratings yet
- Celeste RegueroDocument30 pagesCeleste RegueroGary EvangelistaNo ratings yet
- The Fashion Designing ProcessDocument6 pagesThe Fashion Designing ProcessBrijonaNo ratings yet
- Fashionary Shoe Design Spec Sheet & Range PlanDocument4 pagesFashionary Shoe Design Spec Sheet & Range PlanMaqiavelika WeberNo ratings yet
- Catalogo ICad3D EnglishDocument24 pagesCatalogo ICad3D Englishtairos555No ratings yet
- Unit 8 Documentation in Cutting Room: StructureDocument11 pagesUnit 8 Documentation in Cutting Room: StructureHarry AryanNo ratings yet
- Unit 3 Lasting Process Control Systems: StructureDocument11 pagesUnit 3 Lasting Process Control Systems: StructureHarry AryanNo ratings yet
- Dopp Kit Pattern Free PDFDocument8 pagesDopp Kit Pattern Free PDFNarendra KumawatNo ratings yet
- Fddi Prospectus 2021Document59 pagesFddi Prospectus 2021Indronil BhowalNo ratings yet
- SHOEMASTERDocument2 pagesSHOEMASTERXochiquétzal EnmiNo ratings yet
- 1840 1845 Brown Twill CorsetDocument1 page1840 1845 Brown Twill CorsetsophiaNo ratings yet
- What Is Tanning? Overview of Leather Processing Process 2019Document9 pagesWhat Is Tanning? Overview of Leather Processing Process 2019HayLambert0No ratings yet
- Complete Footwear CADCAM SolutionsDocument11 pagesComplete Footwear CADCAM SolutionssaptagunungNo ratings yet
- Stitch TecDocument2 pagesStitch TecNery LopezNo ratings yet
- Shoemaker PracticeDocument7 pagesShoemaker PracticeVARFDXNo ratings yet
- Automation of Shoe Last ModificationDocument16 pagesAutomation of Shoe Last ModificationIlamparithiNo ratings yet
- 68-Grading of Shoe ComponentsDocument11 pages68-Grading of Shoe ComponentsSadikul IslamNo ratings yet
- Motion of The Human FeetDocument74 pagesMotion of The Human FeetL.E. Velez100% (4)
- How To Make A Hacker's Wallet v.1.0 Using Reclaimed MaterialsDocument7 pagesHow To Make A Hacker's Wallet v.1.0 Using Reclaimed Materialsarcheion100% (1)
- Catalog RedWingShoes 2011Document52 pagesCatalog RedWingShoes 2011monkistNo ratings yet
- Introduction of CADDocument6 pagesIntroduction of CADKhengling Lim100% (1)
- Lasting Handout 1Document27 pagesLasting Handout 1Tes KingNo ratings yet
- ECCO 2013 Book - Shoe Design Fueled by Feeling - For Web and DistributionDocument124 pagesECCO 2013 Book - Shoe Design Fueled by Feeling - For Web and DistributionAlessandra AnerdiNo ratings yet
- Net Promoter ScoreDocument94 pagesNet Promoter Scoreazazelavey100% (1)
- Moccasin en ShoemasterDocument22 pagesMoccasin en ShoemasterluixvargsNo ratings yet
- The Basics of Shoe DesignDocument22 pagesThe Basics of Shoe DesignCarlosNo ratings yet
- 1.1.c. Introduction To Leather TechnologyDocument6 pages1.1.c. Introduction To Leather TechnologyAnanthNo ratings yet
- Patterns and TexturesDocument7 pagesPatterns and TexturesTrupthi JhawarNo ratings yet
- Footprints Katalog enDocument68 pagesFootprints Katalog enorthopluschiosNo ratings yet
- Caligola4 Shoes IngDocument12 pagesCaligola4 Shoes IngВикаNo ratings yet
- Cfti Agra FDPD Curriculum PDFDocument49 pagesCfti Agra FDPD Curriculum PDFSingh Singh100% (1)
- CADCAM Lecture NotesDocument223 pagesCADCAM Lecture NotesAnish KulkarniNo ratings yet
- Maletin para Laptop en CueroDocument32 pagesMaletin para Laptop en Cuerojuampis2000No ratings yet
- The Shoe Industry 1916 PDFDocument336 pagesThe Shoe Industry 1916 PDFviet leNo ratings yet
- Kolkata Shoemaking ClusterDocument123 pagesKolkata Shoemaking ClusterAnand SalujaNo ratings yet
- Tech Pack - PDM PDFDocument13 pagesTech Pack - PDM PDFshowaib noorNo ratings yet
- Bucket Hat PatternDocument4 pagesBucket Hat Patternmeegs100% (2)
- Annex G: Applicant'S/Licensee'S Declaration of Brand Name/ Trade Mark Proposed To Be Covered Under CertificationDocument1 pageAnnex G: Applicant'S/Licensee'S Declaration of Brand Name/ Trade Mark Proposed To Be Covered Under CertificationSanjay Paliwal100% (1)
- 2016 Katalog Kurac PalacDocument158 pages2016 Katalog Kurac Palacanon_486275253No ratings yet
- CatalogDocument60 pagesCatalogAshish KumarNo ratings yet
- 1 Year Diploma in Fashion DesigningDocument4 pages1 Year Diploma in Fashion DesigningMuhammad SaadNo ratings yet
- Shoemaster PowerDocument16 pagesShoemaster Powerluixvargs100% (2)
- Tied Shoe HandbookDocument16 pagesTied Shoe HandbookRaajeswaran BaskaranNo ratings yet
- The Manufacture Of Boots And Shoes : Being A Modern Treatise Of All The Processes Of Making And Manufacturing Footgear.From EverandThe Manufacture Of Boots And Shoes : Being A Modern Treatise Of All The Processes Of Making And Manufacturing Footgear.No ratings yet
- TLV 1117Document39 pagesTLV 1117borlixNo ratings yet
- BE-DuPont Teflon PrimersDocument1 pageBE-DuPont Teflon PrimersborlixNo ratings yet
- 013149-100 Optioner HP20Document1 page013149-100 Optioner HP20borlixNo ratings yet
- AWK Cable Bundle - 6308EN-00Document2 pagesAWK Cable Bundle - 6308EN-00borlixNo ratings yet
- ABB Compact Flash DSQC656Document3 pagesABB Compact Flash DSQC656borlixNo ratings yet
- TEPT5700: Vishay SemiconductorsDocument5 pagesTEPT5700: Vishay SemiconductorsborlixNo ratings yet
- CosyPUR Flyer Visco en NCIDocument2 pagesCosyPUR Flyer Visco en NCIborlixNo ratings yet
- Floppy Drive Emulator 2 - Floppy To USB - Floppy Drive To USBDocument5 pagesFloppy Drive Emulator 2 - Floppy To USB - Floppy Drive To USBborlixNo ratings yet
- Supersoft Flyer en NCIDocument2 pagesSupersoft Flyer en NCIborlixNo ratings yet
- Plasticisers enDocument1 pagePlasticisers enborlixNo ratings yet
- Easy Guide To Make Hiren's Bootable USB Flash Drive - Learn Basics of Linux OSDocument8 pagesEasy Guide To Make Hiren's Bootable USB Flash Drive - Learn Basics of Linux OSborlix100% (1)
- Footwearnews 0108Document6 pagesFootwearnews 0108borlixNo ratings yet
- Elastoflex W enDocument2 pagesElastoflex W enborlixNo ratings yet
- Avalon 90ABDocument2 pagesAvalon 90ABborlixNo ratings yet
- Abb Irbt 4003Document64 pagesAbb Irbt 4003borlixNo ratings yet
- Awm 8121Document22 pagesAwm 8121borlixNo ratings yet
- FlujometroDocument4 pagesFlujometroVictor Manuel Hernandez EscalanteNo ratings yet
- Four Core Self Supporting XLPE Insulated Power Cable: Specification No. NPS - 81Document14 pagesFour Core Self Supporting XLPE Insulated Power Cable: Specification No. NPS - 81quycoctuNo ratings yet
- 2146 PolicyControl RealTimeCharging 2012 6pp A3Document6 pages2146 PolicyControl RealTimeCharging 2012 6pp A3filipealexrodriguesNo ratings yet
- Chapter13 ProblemsDocument68 pagesChapter13 ProblemsCaleb Kreeger50% (2)
- TRANSCRIPT Ep. 14 v. 3 Russia's Brain Drain (May 9)Document15 pagesTRANSCRIPT Ep. 14 v. 3 Russia's Brain Drain (May 9)Sean PowersNo ratings yet
- InVision DesignSystemsHandbook PDFDocument222 pagesInVision DesignSystemsHandbook PDFAnonymous sgeec3ZorNo ratings yet
- FAFLDocument136 pagesFAFLHariprasad MutalikdesaiNo ratings yet
- A1 TUV Personnel Dosimetry Application FormDocument1 pageA1 TUV Personnel Dosimetry Application Formradiology mdhcciNo ratings yet
- Contoh ResumeDocument1 pageContoh ResumeMiftah Farid Habib ZaenalToyyibNo ratings yet
- Power Steering System: PrecautionDocument45 pagesPower Steering System: PrecautionMusat Catalin-Marian100% (1)
- Steel Slag in Concrete As Fine Aggregate PDFDocument8 pagesSteel Slag in Concrete As Fine Aggregate PDFSana JavedNo ratings yet
- DC221-03E Design Guide 200907Document16 pagesDC221-03E Design Guide 200907trungNo ratings yet
- Kliping Keanekaragaman Budaya Adat IndonDocument8 pagesKliping Keanekaragaman Budaya Adat IndonLoping LeeNo ratings yet
- Altronix - PD8Document1 pageAltronix - PD8Tv Chacon ChaconNo ratings yet
- Hunter - Reckoning - Hunter Survival GuideDocument136 pagesHunter - Reckoning - Hunter Survival GuideWilliam Hughes100% (1)
- Plot PlanDocument53 pagesPlot PlankarunaNo ratings yet
- Routing AlgorithmsDocument36 pagesRouting AlgorithmsKartik Aneja0% (1)
- Useful ABAP Code in BPC 7.X NW VersionDocument9 pagesUseful ABAP Code in BPC 7.X NW Versionits_nanda08No ratings yet
- CDS 30Document2 pagesCDS 30MarleyNo ratings yet
- Failover Cluster Step-By-Step Guide - Configuring A Two-Node File Server Failover ClusterDocument12 pagesFailover Cluster Step-By-Step Guide - Configuring A Two-Node File Server Failover ClusterAbhijeet KumarNo ratings yet
- JD Edwards Enterpriseone Tools: Security Administration Guide Release 8.98 Update 4Document296 pagesJD Edwards Enterpriseone Tools: Security Administration Guide Release 8.98 Update 4Paul DfouniNo ratings yet
- Anchor ScriptDocument4 pagesAnchor ScriptJenie Rica Valerio DamasoNo ratings yet
- RAB McMillan SGT Products and Maintenance PhilosophyDocument23 pagesRAB McMillan SGT Products and Maintenance PhilosophybgraoNo ratings yet
- Lesson Plan Using Assure ModelDocument3 pagesLesson Plan Using Assure Modelapi-285765357No ratings yet
- Rezwana ResumeDocument2 pagesRezwana Resumeapi-140137201No ratings yet
- Crack Repair by Gravity Feed With ResinDocument6 pagesCrack Repair by Gravity Feed With ResinEladio Almengor100% (1)