You might also like
- 2010 Herdzik Propulsion CharacteristicsDocument8 pages2010 Herdzik Propulsion CharacteristicsSamo SpontanostNo ratings yet
- Proposals of Unconventional Thrusters Applications For Multi-Mode Ship PropulsionDocument12 pagesProposals of Unconventional Thrusters Applications For Multi-Mode Ship PropulsionCip GrecuNo ratings yet
- Achieving Fuel Savings For Anchor Handling Tug Supply Vessels Through Electric Propulsion - ABBDocument4 pagesAchieving Fuel Savings For Anchor Handling Tug Supply Vessels Through Electric Propulsion - ABByw_oulalaNo ratings yet
- The PI CheatSheet for Measuring Ship PerformanceDocument8 pagesThe PI CheatSheet for Measuring Ship Performancenidhink18No ratings yet
- AvaraDocument10 pagesAvaraElchin SattarovNo ratings yet
- Water Removal From Thruster Lubricants Using New TechnologiesDocument9 pagesWater Removal From Thruster Lubricants Using New TechnologieseajNo ratings yet
- Hamworthy St2aDocument4 pagesHamworthy St2aAdnanNo ratings yet
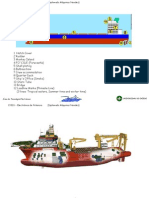
- Dpcs5723 73m Ahts X 2Document18 pagesDpcs5723 73m Ahts X 2123No ratings yet
- Nexans Norway AS m/v Elektron 2009 Annual DP trials reportDocument50 pagesNexans Norway AS m/v Elektron 2009 Annual DP trials reportRamon Teixeira DiasNo ratings yet
- 2x WLSV - Specification Rev 0Document69 pages2x WLSV - Specification Rev 0pal_malayNo ratings yet
- Waterjet Thesis - Rolls Royce PDFDocument170 pagesWaterjet Thesis - Rolls Royce PDFAmmy singhNo ratings yet
- Giao Trinh May LaiDocument45 pagesGiao Trinh May LaidotatchuongNo ratings yet
- Eedi & SeempDocument12 pagesEedi & SeempDheeraj KumarNo ratings yet
- American Club - Vessels - To - The - Usa - 2018Document17 pagesAmerican Club - Vessels - To - The - Usa - 2018Thomas LiontosNo ratings yet
- Marine 2017 18 - Propeller Nozzles DesignDocument13 pagesMarine 2017 18 - Propeller Nozzles DesignMaciej ReichelNo ratings yet
- Pre-Dive and Six HourlyDocument1 pagePre-Dive and Six Hourlydragos vulcanNo ratings yet
- EnquiryDocument24 pagesEnquirySarath PurushothamanNo ratings yet
- MEPC 1-Circ 878Document13 pagesMEPC 1-Circ 878Li Ann ChungNo ratings yet
- Need For A Comprehensive "OSV Code": August 2011Document11 pagesNeed For A Comprehensive "OSV Code": August 2011stanescu mihaiNo ratings yet
- Propulsion Trends in Container VesselsDocument28 pagesPropulsion Trends in Container VesselsAdrianMictarNo ratings yet
- Ochure ulstEINDocument4 pagesOchure ulstEINbernardinodinoNo ratings yet
- CPP Chan Vit Bien Buoc PDFDocument335 pagesCPP Chan Vit Bien Buoc PDFKhoai Sai GonNo ratings yet
- Azimuth Thruster Control System (ACS) PDFDocument4 pagesAzimuth Thruster Control System (ACS) PDFdavid artantoNo ratings yet
- Hanninen 2008 Analysis PDFDocument55 pagesHanninen 2008 Analysis PDFMatej Marko PetkovićNo ratings yet
- Bareboat 2001 ExampleDocument26 pagesBareboat 2001 ExampleodinshippingNo ratings yet
- BMTDSL The Advanced Waterjet Confpaper INEC May10 PDFDocument13 pagesBMTDSL The Advanced Waterjet Confpaper INEC May10 PDFhieuhuech1No ratings yet
- The History and State of the Articulated Tug/Barge (AT/BDocument8 pagesThe History and State of the Articulated Tug/Barge (AT/BistinpoliNo ratings yet
- Msc-mepc.2-Circ.12 - Revised Guidelines For Formal Safety Assessment (Fsa) For Use in The Imo Rule-Making Process (Secretariat)Document72 pagesMsc-mepc.2-Circ.12 - Revised Guidelines For Formal Safety Assessment (Fsa) For Use in The Imo Rule-Making Process (Secretariat)MarineEngineering AeiNo ratings yet
- 7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFDocument25 pages7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFNestor Gómez RojasNo ratings yet
- Lights For Tugs and BargesDocument1 pageLights For Tugs and BargesMocanu BiancaNo ratings yet
- Power Management System PMA 300: Remote Human Machine Interface Protocol DescriptionDocument23 pagesPower Management System PMA 300: Remote Human Machine Interface Protocol Descriptionhamzeh0% (1)
- Uscg Inspection ProceduresDocument148 pagesUscg Inspection Proceduresluckystrike9008100% (2)
- Change of Ship Management CompressedDocument29 pagesChange of Ship Management CompressedNeldethchie SerranoNo ratings yet
- Rolls Royce Insights 2018 Issue 32Document48 pagesRolls Royce Insights 2018 Issue 32Vladimir V. HaltakovNo ratings yet
- Examples of Accidents Involving Multilingual Communication Difficulties and Cultural DiversityDocument23 pagesExamples of Accidents Involving Multilingual Communication Difficulties and Cultural DiversityLance OtadNo ratings yet
- BB Aquarius Folding Fin Stabilisers HRDocument2 pagesBB Aquarius Folding Fin Stabilisers HRAnthonyNo ratings yet
- Hyd Pneu Circuit Symbols PosterDocument1 pageHyd Pneu Circuit Symbols PosterDeekshith DileepNo ratings yet
- Ulstein Designer PX105 BrochureDocument6 pagesUlstein Designer PX105 BrochureKenneth TanNo ratings yet
- Chapter 1 HCX3 User ManualDocument111 pagesChapter 1 HCX3 User ManualSergei Kurpish100% (1)
- Recent Developments in Loading ComputersDocument3 pagesRecent Developments in Loading ComputersanandreevNo ratings yet
- Brochure Diesel Engines 2014 ENGDocument8 pagesBrochure Diesel Engines 2014 ENGmsk5inNo ratings yet
- PST Hand Out NewDocument49 pagesPST Hand Out NewBhargav Krsna GayanNo ratings yet
- Value To The Nation: Inland Waterway NavigationDocument4 pagesValue To The Nation: Inland Waterway Navigationesgee3518No ratings yet
- D20-D21-D22 - Hull Structure Monitoring System and VDR - 07-12-09 V6Document52 pagesD20-D21-D22 - Hull Structure Monitoring System and VDR - 07-12-09 V6CalandrasReyCalandrasreyNo ratings yet
- STP330Document14 pagesSTP330waleedyehiaNo ratings yet
- BOURBON-OrCA - (Bulbo Completo)Document12 pagesBOURBON-OrCA - (Bulbo Completo)Jonathan SotoNo ratings yet
- The Operation of A Fin StabilizerDocument30 pagesThe Operation of A Fin StabilizerSalvador Jr. BesaresNo ratings yet
- People Types and Tiger StripesDocument258 pagesPeople Types and Tiger StripesGigi ElizNo ratings yet
- Conditiion of ClassificationDocument55 pagesConditiion of ClassificationVeeraiah AnbuNo ratings yet
- No. Procedure For Calculation and Verification of The Energy Efficiency Design Index (EEDI) No. 38Document53 pagesNo. Procedure For Calculation and Verification of The Energy Efficiency Design Index (EEDI) No. 38chaktimewpNo ratings yet
- Potential Serious Safety Hazard Norsafe Camsafe Lifeboat Release MechanismsDocument4 pagesPotential Serious Safety Hazard Norsafe Camsafe Lifeboat Release MechanismsEduardo CasagrandeNo ratings yet
- Dual Fuel Engines ExplainedDocument5 pagesDual Fuel Engines ExplainedlingarajuNo ratings yet
- 13326 - Electrónica de Potencia (Diplomado Máquinas NavalesDocument20 pages13326 - Electrónica de Potencia (Diplomado Máquinas NavalesSergey MikhailovNo ratings yet
- UR A Pdf148 Mooring AnchoringDocument21 pagesUR A Pdf148 Mooring AnchoringMeleti Meleti MeletiouNo ratings yet
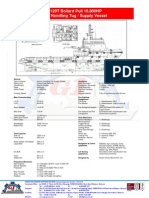
- 70m 120T Bollard Pull 10,800HPDocument1 page70m 120T Bollard Pull 10,800HPMohd ZaidNo ratings yet
- 福建马尾MMC887PSV完工图 PDFDocument48 pages福建马尾MMC887PSV完工图 PDFcarlos100% (1)
- WA2-1-Jurgens - Voith Schneider Propeller (VSP) - Investigations of TH PDFDocument11 pagesWA2-1-Jurgens - Voith Schneider Propeller (VSP) - Investigations of TH PDFAndre OliveiraNo ratings yet
- GasDetectionEquipment PDFDocument46 pagesGasDetectionEquipment PDFgrenjithNo ratings yet
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985From EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellNo ratings yet
- OCEANS Conference Operational Policy ManualDocument168 pagesOCEANS Conference Operational Policy ManualMaciej ReichelNo ratings yet
- Modification and Analysis of Twin Screw Ship SternDocument13 pagesModification and Analysis of Twin Screw Ship SternMaciej ReichelNo ratings yet
- PDFDocument93 pagesPDFMina Youssef HalimNo ratings yet
- Ever Given - Investigation ReportDocument68 pagesEver Given - Investigation ReportMaciej ReichelNo ratings yet
- Marine 2017 18 - Propeller Nozzles DesignDocument13 pagesMarine 2017 18 - Propeller Nozzles DesignMaciej ReichelNo ratings yet
- Manoeuvring BookletDocument34 pagesManoeuvring BookletvDeepDive100% (1)
- Delefortrie2021 Article ForcesAndTorqueActingOnARudderDocument25 pagesDelefortrie2021 Article ForcesAndTorqueActingOnARudderMaciej ReichelNo ratings yet
- E Book Hydronav2021Document118 pagesE Book Hydronav2021Maciej ReichelNo ratings yet
- Schedule Changes and Program Details for STAB 2018 and DfS 2018 ConferencesDocument22 pagesSchedule Changes and Program Details for STAB 2018 and DfS 2018 ConferencesMaciej ReichelNo ratings yet
- Serban, Katona, Panaitescu - The Analysis of Squat and Underkeel Clearance For Different Ship Types in A Trapezoidal Crosssection ChannelDocument8 pagesSerban, Katona, Panaitescu - The Analysis of Squat and Underkeel Clearance For Different Ship Types in A Trapezoidal Crosssection ChannelMaciej ReichelNo ratings yet
- Background Information To Document MEPC 64/4/13: July 2012Document27 pagesBackground Information To Document MEPC 64/4/13: July 2012Maciej ReichelNo ratings yet
- 2.019 Design of Ocean Systems Seakeeping (III) February 25, 2011Document12 pages2.019 Design of Ocean Systems Seakeeping (III) February 25, 2011hossamNo ratings yet
- Model Test Based Formulations of Ship-Ship Interaction ForcesDocument18 pagesModel Test Based Formulations of Ship-Ship Interaction ForcesMaciej ReichelNo ratings yet
- Analysis of A Model For Ship ManeuveringDocument34 pagesAnalysis of A Model For Ship ManeuveringKURNIAWANNo ratings yet
- An Open Access Repository of Middlesex University ResearchDocument13 pagesAn Open Access Repository of Middlesex University ResearchMaciej ReichelNo ratings yet
- Block 2: An Introduction To Intelligent Transportation Systems 1.212Document28 pagesBlock 2: An Introduction To Intelligent Transportation Systems 1.212Maciej ReichelNo ratings yet
- Intact Stability Code msc-267-85 08Document94 pagesIntact Stability Code msc-267-85 08sugram100% (1)
- Fuzzy Self-tuning PID Controller Improves Ship Course ControlDocument12 pagesFuzzy Self-tuning PID Controller Improves Ship Course ControlMaciej ReichelNo ratings yet
- Marine Propulsion Symposium History and ScopeDocument2 pagesMarine Propulsion Symposium History and ScopeMaciej ReichelNo ratings yet
- Analysis of Inherent Course Stability of A High-Speed Catamaran in Deep and Shallow WaterDocument15 pagesAnalysis of Inherent Course Stability of A High-Speed Catamaran in Deep and Shallow WaterMaciej ReichelNo ratings yet
- A Master's Guide To BerthingDocument28 pagesA Master's Guide To BerthingMaciej Reichel100% (1)
- Ocean and Polar Engineering Conference: Updated Technical ProgramDocument23 pagesOcean and Polar Engineering Conference: Updated Technical ProgramMaciej ReichelNo ratings yet
- NuTTS 2019 Wawrzusiszyn Kolodziej Bielicki Final VersionDocument6 pagesNuTTS 2019 Wawrzusiszyn Kolodziej Bielicki Final VersionMaciej ReichelNo ratings yet
- Ocean Engineering: H. YasukawaDocument10 pagesOcean Engineering: H. YasukawaMaciej ReichelNo ratings yet
- Dynamic Positioning System Design For "Blue Lady". Simulation TestsDocument9 pagesDynamic Positioning System Design For "Blue Lady". Simulation TestsMaciej ReichelNo ratings yet
- OMAE 2019 Final ReportDocument62 pagesOMAE 2019 Final ReportMaciej ReichelNo ratings yet
- Ocean Engineering: Teresa Abramowicz-Gerigk, Zbigniew Burciu, Wojciech Górski, Maciej ReichelDocument11 pagesOcean Engineering: Teresa Abramowicz-Gerigk, Zbigniew Burciu, Wojciech Górski, Maciej ReichelMaciej ReichelNo ratings yet
- Matusiak - Dynamics of A Rigid ShipDocument153 pagesMatusiak - Dynamics of A Rigid ShipMaciej ReichelNo ratings yet
- Górnicz, Kulczyk - Application of CFD Methods For The Assessment of Ship Manoeuvrability in Shallow WaterDocument6 pagesGórnicz, Kulczyk - Application of CFD Methods For The Assessment of Ship Manoeuvrability in Shallow WaterMaciej ReichelNo ratings yet
- School of Public Health: Haramaya University, ChmsDocument40 pagesSchool of Public Health: Haramaya University, ChmsRida Awwal100% (1)
- 2 Druid StreetDocument4 pages2 Druid StreetthamestunnelNo ratings yet
- Pure and Applied Analysis Problems Solved Step-by-StepDocument8 pagesPure and Applied Analysis Problems Solved Step-by-Stepalpha2122No ratings yet
- Appendix 1 Application FormDocument13 pagesAppendix 1 Application FormSharifahrodiah SemaunNo ratings yet
- Scientology Abridged Dictionary 1973Document21 pagesScientology Abridged Dictionary 1973Cristiano Manzzini100% (2)
- Grace Lipsini1 2 3Document4 pagesGrace Lipsini1 2 3api-548923370No ratings yet
- Bhakti Trader Ram Pal JiDocument232 pagesBhakti Trader Ram Pal JiplancosterNo ratings yet
- U-KLEEN Moly Graph MsdsDocument2 pagesU-KLEEN Moly Graph MsdsShivanand MalachapureNo ratings yet
- Quality Improvement Reading Material1Document10 pagesQuality Improvement Reading Material1Paul Christopher PinedaNo ratings yet
- Dyna 2000 LiteDocument2 pagesDyna 2000 LiteRNKNo ratings yet
- A ULTIMA ReleaseNotesAxiomV PDFDocument38 pagesA ULTIMA ReleaseNotesAxiomV PDFIVANALTAMARNo ratings yet
- Prof. Ed - Assessment and Evaluation of Learning Part 1-4Document8 pagesProf. Ed - Assessment and Evaluation of Learning Part 1-4Marisol Altobar PalatinoNo ratings yet
- 13Document47 pages13Rohan TirmakheNo ratings yet
- Boala Cronica Obstructive: BpocDocument21 pagesBoala Cronica Obstructive: BpocNicoleta IliescuNo ratings yet
- Useful Relations in Quantum Field TheoryDocument30 pagesUseful Relations in Quantum Field TheoryDanielGutierrez100% (1)
- Organizational Behaviour Group Assignment-2Document4 pagesOrganizational Behaviour Group Assignment-2Prateek KurupNo ratings yet
- Evolution Packet FinalDocument24 pagesEvolution Packet FinalJoaquinNo ratings yet
- Organic Chem Diels-Alder Reaction LabDocument9 pagesOrganic Chem Diels-Alder Reaction LabPryanka BalleyNo ratings yet
- Sample QuestionsDocument70 pagesSample QuestionsBushra MaryamNo ratings yet
- SeparatorDocument2 pagesSeparatormmk111No ratings yet
- K230F Equipment ManualsDocument166 pagesK230F Equipment ManualsHui ChenNo ratings yet
- Service Parts List: 54-26-0005 2551-20 M12™ FUEL™ SURGE™ 1/4" Hex Hydraulic Driver K42ADocument2 pagesService Parts List: 54-26-0005 2551-20 M12™ FUEL™ SURGE™ 1/4" Hex Hydraulic Driver K42AAmjad AlQasrawi100% (1)
- Strategic Flexibility: The Evolving Paradigm of Strategic ManagementDocument3 pagesStrategic Flexibility: The Evolving Paradigm of Strategic Managementnanthini kanasanNo ratings yet
- Hanwha Engineering & Construction - Brochure - enDocument48 pagesHanwha Engineering & Construction - Brochure - enAnthony GeorgeNo ratings yet
- PediculosisDocument14 pagesPediculosisREYMARK HACOSTA100% (1)
- 2010 HSC Exam PhysicsDocument42 pages2010 HSC Exam PhysicsVictor345No ratings yet
- Fashion Cycle StepsDocument2 pagesFashion Cycle Stepssaranya narenNo ratings yet
- Digital Water Monitoring and Turbidity Quality System Using MicrocontrollerDocument8 pagesDigital Water Monitoring and Turbidity Quality System Using MicrocontrollerIrin DwiNo ratings yet
- Eole Press KitDocument15 pagesEole Press KitBob AndrepontNo ratings yet
- Chronological OrderDocument5 pagesChronological OrderDharWin d'Wing-Wing d'AriestBoyzNo ratings yet