You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Differential Amplifier With ActiveDocument19 pagesDifferential Amplifier With Activerida40% (1)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Space-Time Codes For High Data-Rate Wireless Communication: Abhay Kumar Sah, Sushobhan NayakDocument47 pagesSpace-Time Codes For High Data-Rate Wireless Communication: Abhay Kumar Sah, Sushobhan Nayakrida4No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Fixed-Point Receiver Based On Low-Complexity PDFDocument4 pagesFixed-Point Receiver Based On Low-Complexity PDFrida4No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Towards Efficient Design of Fixed-Point Iterative ReceiverDocument5 pagesTowards Efficient Design of Fixed-Point Iterative Receiverrida4No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- WNMC 03 Phy 2015Document54 pagesWNMC 03 Phy 2015rida4No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Basics of Mobile PropagationDocument72 pagesThe Basics of Mobile Propagationrida4No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Iterative Receivers Combining MIMO DetectionDocument19 pagesIterative Receivers Combining MIMO Detectionrida4No ratings yet
- UNII-MAC Protocol Design and Evaluation For 5G Ultra-Dense Small CellDocument17 pagesUNII-MAC Protocol Design and Evaluation For 5G Ultra-Dense Small Cellrida4No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- UNII-MAC Protocol Design and Evaluation For 5G Ultra-Dense Small CellDocument17 pagesUNII-MAC Protocol Design and Evaluation For 5G Ultra-Dense Small Cellrida4No ratings yet
- Article IOTDocument13 pagesArticle IOTrida4No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Iterative Receivers Combining MIMO DetectionDocument19 pagesIterative Receivers Combining MIMO Detectionrida4No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Comparative Study of Skin Color Detection and Segm PDFDocument9 pagesComparative Study of Skin Color Detection and Segm PDFrida4No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Face Detection Algorithm Based On Skin Detection PDFDocument8 pagesFace Detection Algorithm Based On Skin Detection PDFrida4No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Fingerprint Image Quality Analysis PDFDocument5 pagesFingerprint Image Quality Analysis PDFrida4No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Optimum Color Spaces For Skin Detection: February 2001Document4 pagesOptimum Color Spaces For Skin Detection: February 2001rida4No ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Dom PDFDocument5 pagesDom PDFrida4No ratings yet
- Turbo MasterDocument85 pagesTurbo Masterrida4No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- SIGVERIFDocument7 pagesSIGVERIFrida4No ratings yet
- Low Complexity K-Best Based Iterative Receiver PDFDocument5 pagesLow Complexity K-Best Based Iterative Receiver PDFrida4No ratings yet
- Paradise Datacom PD20 Satellite ModemDocument5 pagesParadise Datacom PD20 Satellite ModemarzeszutNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Cambium Networks: PTP 670 IntegratedDocument4 pagesCambium Networks: PTP 670 IntegratedJuan PerezNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
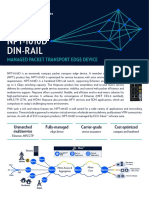
- Neptune NPT-1010D Din-Rail: Managed Packet Transport Edge DeviceDocument2 pagesNeptune NPT-1010D Din-Rail: Managed Packet Transport Edge DevicesantiagobermeoNo ratings yet
- Cnpilot E600 Indoor: Gigabit 802.11ac Wave 2 Dual Band 4X4 Indoor Access PointDocument3 pagesCnpilot E600 Indoor: Gigabit 802.11ac Wave 2 Dual Band 4X4 Indoor Access PointLuis MendozaNo ratings yet
- RAN Feature Documentation RAN20.1 - 05 20190118145943Document62 pagesRAN Feature Documentation RAN20.1 - 05 20190118145943Aleksandar PanicNo ratings yet
- Serial Cables & AdaptersDocument13 pagesSerial Cables & AdaptersDrew AlbaneseNo ratings yet
- Multiplexing & DemultiplexingDocument20 pagesMultiplexing & DemultiplexingPedro OleskoNo ratings yet
- PcidevsDocument395 pagesPcidevspradeep197475No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- IEEE 802: What Is It, and Why Should I Care?: 7. Wifi FamilyDocument8 pagesIEEE 802: What Is It, and Why Should I Care?: 7. Wifi FamilyEithu ThutunNo ratings yet
- ALU Parameter Description v2Document136 pagesALU Parameter Description v2Anonymous DUua3A5No ratings yet
- Umux SDH Stm-4 Unit Syn4E: Cost Effective Umux Solution For Eos (Ethernet Over SDH) and SDH Stm-4 Network ApplicationsDocument2 pagesUmux SDH Stm-4 Unit Syn4E: Cost Effective Umux Solution For Eos (Ethernet Over SDH) and SDH Stm-4 Network ApplicationsHassam AhmadNo ratings yet
- 02 NOKIA Proven Strategy Feature 2G 3G 4G V1 2TSELDocument17 pages02 NOKIA Proven Strategy Feature 2G 3G 4G V1 2TSELYusuf Azeez100% (1)
- Tcell and LCG - Banglalink - v3.7Document12 pagesTcell and LCG - Banglalink - v3.7roniNo ratings yet
- Zte BSC Hardware PresentationDocument53 pagesZte BSC Hardware PresentationMakarand Dere100% (4)
- TSW202 Datasheet 2023-v1.1Document8 pagesTSW202 Datasheet 2023-v1.1danasabesaleh2012No ratings yet
- Co RecessDocument5 pagesCo RecessAlcinio MunizNo ratings yet
- Fast Lane - Ci-DcnxDocument2 pagesFast Lane - Ci-DcnxThiru SivaNo ratings yet
- WiFi QnsDocument5 pagesWiFi QnsJayakrishnan MarangattNo ratings yet
- Volte DocsDocument4 pagesVolte DocsVishalNo ratings yet
- 08-SmartAX MA5612 and MA5616Document4 pages08-SmartAX MA5612 and MA5616dpecile100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CQI & UE Category MappingDocument5 pagesCQI & UE Category Mappingvietdung78No ratings yet
- Infinera Ds 10g Otn Muxponder Otn AggregationDocument3 pagesInfinera Ds 10g Otn Muxponder Otn Aggregationdyhi cars2 clubNo ratings yet
- ZTE KPI's Cell SenseDocument13 pagesZTE KPI's Cell SenseMuhammad Irfan Hassan KhanNo ratings yet
- UMTS & HSDPA Fundamentals Version 4.0Document63 pagesUMTS & HSDPA Fundamentals Version 4.0Ravi_Vachhani_4636No ratings yet
- ADRF SPecADX - DAS - BrochureDocument3 pagesADRF SPecADX - DAS - BrochureBI EngineeringNo ratings yet
- LTE BandsDocument1 pageLTE BandssulissetiawatiNo ratings yet
- B-Isdn: Bisdn8 1Document23 pagesB-Isdn: Bisdn8 1Arvind Singh RajpurohitNo ratings yet
- Open WifiDocument1 pageOpen Wifikae7No ratings yet
- Sector Base Station RW-5200-2250 Data Sheet: Radwin 5000 - HPMPDocument2 pagesSector Base Station RW-5200-2250 Data Sheet: Radwin 5000 - HPMPJose VazNo ratings yet
- Ubee DOCSIS 3.0 Advanced Wireless Voice Gateway Model: DVW32EDocument2 pagesUbee DOCSIS 3.0 Advanced Wireless Voice Gateway Model: DVW32EJuan100% (1)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsFrom EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNo ratings yet