You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Circuits WorksheetDocument3 pagesCircuits Worksheettuvvac67% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- University Physics III - Optics and Modern PhysicsDocument630 pagesUniversity Physics III - Optics and Modern PhysicsFeiFei Sun100% (1)
- Splice Design - LRFDDocument22 pagesSplice Design - LRFDkalpanaadhiNo ratings yet
- Atomic Model and TheoryDocument36 pagesAtomic Model and TheoryAmber Roanne100% (1)
- 2ND QuarterDocument23 pages2ND QuarterJeana JohnsonNo ratings yet
- Imagining Mobility With Beckn v1.1Document21 pagesImagining Mobility With Beckn v1.1laeeeqNo ratings yet
- Table A-4E: Saturated Water-Temperature TableDocument8 pagesTable A-4E: Saturated Water-Temperature TableAcadGucciManeNo ratings yet
- The Entropy Law and The Economic Process by Nicholas Georgescu-Roegen PDFDocument467 pagesThe Entropy Law and The Economic Process by Nicholas Georgescu-Roegen PDFnewlifer96% (26)
- A Privacy-Friendly Gaming Framework in Smart Electricity and Water GridsDocument13 pagesA Privacy-Friendly Gaming Framework in Smart Electricity and Water GridslaeeeqNo ratings yet
- Achieving Efficient Detection Against False Data Injection Attacks in Smart GridDocument12 pagesAchieving Efficient Detection Against False Data Injection Attacks in Smart GridlaeeeqNo ratings yet
- A Power Line Communication On DC Bus With Photovoltaic StringsDocument6 pagesA Power Line Communication On DC Bus With Photovoltaic StringslaeeeqNo ratings yet
- A Framework For Modeling Cyber-Physical Switching Attacks in Smart GridDocument13 pagesA Framework For Modeling Cyber-Physical Switching Attacks in Smart GridlaeeeqNo ratings yet
- Optimal Rate-Adaptive Data Dissemination in Vehicular PlatoonsDocument11 pagesOptimal Rate-Adaptive Data Dissemination in Vehicular PlatoonslaeeeqNo ratings yet
- Dual-Mode Distributed Model Predictive Control For Platooning of Con-Nected Vehicles With Nonlinear DynamicsDocument11 pagesDual-Mode Distributed Model Predictive Control For Platooning of Con-Nected Vehicles With Nonlinear DynamicslaeeeqNo ratings yet
- Distributed H Control of Platoon Interacted by Switching and Undirected TopologyDocument10 pagesDistributed H Control of Platoon Interacted by Switching and Undirected TopologylaeeeqNo ratings yet
- Attack Resilient Heterogeneous Vehicle Platooning Using Secure Distributed Nonlinear Model Predictive ControlDocument6 pagesAttack Resilient Heterogeneous Vehicle Platooning Using Secure Distributed Nonlinear Model Predictive ControllaeeeqNo ratings yet
- A Deep Learning Platooning-Based Video Information-Sharing Internet of Things Framework For Autonomous Driving SystemsDocument11 pagesA Deep Learning Platooning-Based Video Information-Sharing Internet of Things Framework For Autonomous Driving SystemslaeeeqNo ratings yet
- Evaluating The Performance of The Vessel Train Concepteuropean Transport Research ReviewDocument11 pagesEvaluating The Performance of The Vessel Train Concepteuropean Transport Research ReviewlaeeeqNo ratings yet
- Sensors: Experimental Demonstration of Mmwave Vehicle-To-Vehicle Communications Using Ieee 802.11adDocument22 pagesSensors: Experimental Demonstration of Mmwave Vehicle-To-Vehicle Communications Using Ieee 802.11adlaeeeqNo ratings yet
- Physica A: Damian N. Dailisan, May T. LimDocument11 pagesPhysica A: Damian N. Dailisan, May T. LimlaeeeqNo ratings yet
- Case Studies On Transport Policy: SciencedirectDocument19 pagesCase Studies On Transport Policy: SciencedirectlaeeeqNo ratings yet
- Platooning Control For Sailboats Using A Tack Strategy: AbstractDocument11 pagesPlatooning Control For Sailboats Using A Tack Strategy: AbstractlaeeeqNo ratings yet
- Transportation Research B: Yang Zhou, Soyoung Ahn, Meng Wang, Serge HoogendoornDocument19 pagesTransportation Research B: Yang Zhou, Soyoung Ahn, Meng Wang, Serge HoogendoornlaeeeqNo ratings yet
- Transportation Research Part FDocument14 pagesTransportation Research Part FlaeeeqNo ratings yet
- Swarm Intelligence Based Efficient Routing Algorithm For Platooning in VANET Through Ant Colony OptimizationDocument7 pagesSwarm Intelligence Based Efficient Routing Algorithm For Platooning in VANET Through Ant Colony OptimizationlaeeeqNo ratings yet
- Reducing Time Headway For Platooning of Connected Vehicles Via V2V Communicationtransportation Research Part C Emerging TechnologiesDocument19 pagesReducing Time Headway For Platooning of Connected Vehicles Via V2V Communicationtransportation Research Part C Emerging TechnologieslaeeeqNo ratings yet
- Indian Mujahideen: Computational Analysis and Public PolicyDocument25 pagesIndian Mujahideen: Computational Analysis and Public PolicylaeeeqNo ratings yet
- Computers: Towards Self-Aware Multirotor FormationsDocument29 pagesComputers: Towards Self-Aware Multirotor FormationslaeeeqNo ratings yet
- Task Offloading Based On Lyapunov Optimization For Mecassisted Vehicular Platooning Networkssensors SwitzerlandDocument15 pagesTask Offloading Based On Lyapunov Optimization For Mecassisted Vehicular Platooning Networkssensors SwitzerlandlaeeeqNo ratings yet
- Strategic Perspectives 17 PDFDocument46 pagesStrategic Perspectives 17 PDFlaeeeqNo ratings yet
- Review - Break All The Borders: Separatism and The Reshaping of The Middle EastDocument3 pagesReview - Break All The Borders: Separatism and The Reshaping of The Middle EastlaeeeqNo ratings yet
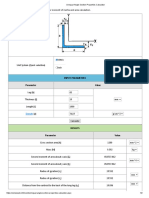
- Equal Angle Section Properties CalculatorDocument2 pagesEqual Angle Section Properties CalculatorPinku Maiti100% (1)
- Cambridge International Examinations Cambridge Ordinary LevelDocument16 pagesCambridge International Examinations Cambridge Ordinary LevelBilawal ZiaNo ratings yet
- Misconceptions in Biology and ChemistryDocument11 pagesMisconceptions in Biology and ChemistryJuliecris Tanutan BaragaNo ratings yet
- PhyDocument2 pagesPhyusamaNo ratings yet
- Thermal Conductivity Measurements On Challenging Samples by The 3 Omega MethodDocument6 pagesThermal Conductivity Measurements On Challenging Samples by The 3 Omega MethodTriều Huỳnh NhậtNo ratings yet
- Chapter ADocument2 pagesChapter Ahashil1No ratings yet
- Introduction To Polymer Flow ModuleDocument46 pagesIntroduction To Polymer Flow ModuleAniket Ghosh DastidarNo ratings yet
- Tutorial On Flowmeters Nov17Document2 pagesTutorial On Flowmeters Nov17Ranjan Kumar100% (1)
- Circ Mot-Grav Problems-08Document2 pagesCirc Mot-Grav Problems-08S DASNo ratings yet
- Self - Supporting Dome Roof On Tank With V 70 000 M Capacity. New Approaches To DesignDocument6 pagesSelf - Supporting Dome Roof On Tank With V 70 000 M Capacity. New Approaches To DesignReda ArifNo ratings yet
- List of CompetenciesDocument6 pagesList of CompetenciesJose Barrera GaleraNo ratings yet
- C 2Document11 pagesC 2RushmoreNo ratings yet
- Calculation-Strainer-Crude Edible OilDocument4 pagesCalculation-Strainer-Crude Edible OilHasmukh DaveNo ratings yet
- Available Online: SATECH 3 (1) : 185 - 191 (2009)Document7 pagesAvailable Online: SATECH 3 (1) : 185 - 191 (2009)Apeksha KuteNo ratings yet
- 28 Flow Through A Venturi Flume Slice Gate 374s18Document5 pages28 Flow Through A Venturi Flume Slice Gate 374s18Ekala XuhalxNo ratings yet
- PHYS-P 201: General Physics 1Document34 pagesPHYS-P 201: General Physics 1Samock777No ratings yet
- Satellite Motion 2 NotesDocument12 pagesSatellite Motion 2 NotesJoey BryanNo ratings yet
- Flight MechanicsDocument536 pagesFlight MechanicsArpit Dodia100% (2)
- Ohm's Law Lab ReportDocument7 pagesOhm's Law Lab ReportIzzah hazziqa100% (1)
- Republique Du Cameroun Paix - Travail - Patrie Republic of Cameroon Peace - Work - FatherlandDocument32 pagesRepublique Du Cameroun Paix - Travail - Patrie Republic of Cameroon Peace - Work - FatherlandGuillaume Hervé POH'SIÉNo ratings yet
- Layla and Majnun Math PDFDocument8 pagesLayla and Majnun Math PDFKhyaree EspañaNo ratings yet
- Explanation TextDocument6 pagesExplanation TextFransiska SiskaNo ratings yet
- Research QuestionDocument4 pagesResearch QuestionChaitanya KrishnaNo ratings yet