You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- John Deere 5100R OCDocument3 pagesJohn Deere 5100R OCYundi GaoNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- GBT 12544-2012 汽车最高车速试验方法Document11 pagesGBT 12544-2012 汽车最高车速试验方法Yundi GaoNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- John Deere 7930 PSDocument4 pagesJohn Deere 7930 PSYundi GaoNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Hydrostatic Transmissions: TB135 TB138-2 TB172 TB172-2 TB172-2Document2 pagesHydrostatic Transmissions: TB135 TB138-2 TB172 TB172-2 TB172-2Yundi GaoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Wheel Excavators DrivelinesDocument3 pagesWheel Excavators DrivelinesRasoolKhadibiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Wheel Loaders DrivelinesDocument3 pagesWheel Loaders DrivelinesYundi GaoNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 918M PDFDocument4 pages918M PDFYundi GaoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- US6949045 - Power Distributed 2-Range TransmissionDocument4 pagesUS6949045 - Power Distributed 2-Range TransmissionYundi GaoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- DanaRexrothHVTR3 PDFDocument2 pagesDanaRexrothHVTR3 PDFYundi GaoNo ratings yet
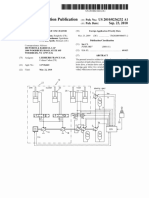
- US20100236232 - Drive For A Hydraulic Excavator PDFDocument8 pagesUS20100236232 - Drive For A Hydraulic Excavator PDFYundi GaoNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- US7828683 - CVT Hydromechanical DriveDocument6 pagesUS7828683 - CVT Hydromechanical DriveYundi GaoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- US4259881 - Hydromechanical Load-Splitting DriveDocument4 pagesUS4259881 - Hydromechanical Load-Splitting DriveYundi GaoNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- US7396309 - Split Power Transmission To Include A Variable DriveDocument5 pagesUS7396309 - Split Power Transmission To Include A Variable DriveYundi GaoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- US5211015 - Hydraulic Circuit For Limiting The Torque of A Hydrostatic Hydraulic Motor Connected in Closed Circuit To A Hydraulic PumpDocument11 pagesUS5211015 - Hydraulic Circuit For Limiting The Torque of A Hydrostatic Hydraulic Motor Connected in Closed Circuit To A Hydraulic PumpYundi GaoNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- US6949045 - Power Distributed 2-Range TransmissionDocument4 pagesUS6949045 - Power Distributed 2-Range TransmissionYundi GaoNo ratings yet
- US20040082421 - Split Performance Power TrainDocument4 pagesUS20040082421 - Split Performance Power TrainYundi GaoNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- US4994002 - Variable-Speed Power Transmission DeviceDocument4 pagesUS4994002 - Variable-Speed Power Transmission DeviceYundi GaoNo ratings yet
- EP1342937A2 - Infinitely Variable Transmission.Document8 pagesEP1342937A2 - Infinitely Variable Transmission.Yundi GaoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- US4569251 - Driveline For A Track-Laying Vehicle With Continuously Variable Steering and Propulsion TransmissionsDocument5 pagesUS4569251 - Driveline For A Track-Laying Vehicle With Continuously Variable Steering and Propulsion TransmissionsYundi GaoNo ratings yet
- News Release: Dana Rexroth Transmission Systems Località Linfano, Zona Industriale 38062 Arco (Trento) ItalyDocument2 pagesNews Release: Dana Rexroth Transmission Systems Località Linfano, Zona Industriale 38062 Arco (Trento) ItalyYundi GaoNo ratings yet
- EP1273828A2 - Torque Split Power TransmissionDocument5 pagesEP1273828A2 - Torque Split Power TransmissionYundi GaoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- US20040082418 - Power Branched TransmissionDocument4 pagesUS20040082418 - Power Branched TransmissionYundi GaoNo ratings yet
- Dana Rexroth Nears Start of Production On R2 Hydromechanical Variable Transmission PlatformDocument2 pagesDana Rexroth Nears Start of Production On R2 Hydromechanical Variable Transmission PlatformYundi GaoNo ratings yet
- Dana Rexroth Nears Start of Production On R2 Hydromechanical Variable Transmission PlatformDocument2 pagesDana Rexroth Nears Start of Production On R2 Hydromechanical Variable Transmission PlatformYundi GaoNo ratings yet
- Ksam 38 171Document9 pagesKsam 38 171Richard De Medeiros CastroNo ratings yet
- DanaRexrothHVTR3 PDFDocument2 pagesDanaRexrothHVTR3 PDFYundi GaoNo ratings yet
- From Components To Systems - Hydromechanical Variable TransmissionDocument8 pagesFrom Components To Systems - Hydromechanical Variable TransmissionYundi GaoNo ratings yet
- HVT R3 SpecSheetDocument2 pagesHVT R3 SpecSheetYundi GaoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- VT5518 10-2013-EN WebDocument14 pagesVT5518 10-2013-EN WebYundi GaoNo ratings yet
- Track Feeding Transformers For Growing Rail NetworkDocument18 pagesTrack Feeding Transformers For Growing Rail Networksajeevi piumikaNo ratings yet
- Kinematics of A Particle Moving in A Straight Line: Isam Al Hassan 0796988794Document55 pagesKinematics of A Particle Moving in A Straight Line: Isam Al Hassan 0796988794isamalhassanNo ratings yet
- More Accurate Localized Wire Rope Testing Based On Hall Sensor ArrayDocument2 pagesMore Accurate Localized Wire Rope Testing Based On Hall Sensor ArrayNesanNo ratings yet
- Identification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocument5 pagesIdentification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerJurgen CokuNo ratings yet
- Mastering Physics - Change of Phase (Temperature), Sound LabDocument10 pagesMastering Physics - Change of Phase (Temperature), Sound LabpalparasNo ratings yet
- Military Institute of Science & TechnologyDocument3 pagesMilitary Institute of Science & Technologyahmed rifatNo ratings yet
- LegendDocument8 pagesLegendhassanpour5882No ratings yet
- Synchronous Motors SlidesDocument55 pagesSynchronous Motors SlidesKaye Freyssinet Nermal Abanggan100% (1)
- Scope: Specific ApplicationsDocument29 pagesScope: Specific ApplicationsGary CudalNo ratings yet
- Important Questions DomDocument6 pagesImportant Questions DomSanthosh RasaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Physics Book Volume 2Document328 pagesPhysics Book Volume 2madhusudhanan.scholarNo ratings yet
- q2, m1 ScienceDocument16 pagesq2, m1 ScienceRobelyn Bautista AsorNo ratings yet
- Pss Manual NewDocument34 pagesPss Manual Newറിജിൽ വി ആർNo ratings yet
- 01 - Uniform Circular MotionDocument38 pages01 - Uniform Circular MotionIdrus FitriNo ratings yet
- Abb 1hc0075853-Revaa en Surge Arrester Polim-DDocument5 pagesAbb 1hc0075853-Revaa en Surge Arrester Polim-Drobert_rjcNo ratings yet
- Christoph Schiller MOTION MOUNTAIN The Adventure of PhysicsDocument372 pagesChristoph Schiller MOTION MOUNTAIN The Adventure of PhysicsHariom SharmaNo ratings yet
- Ac DC PDFDocument10 pagesAc DC PDFLakshmisona msNo ratings yet
- Solutions Manual For Electric Circuit Analysis David JohnsonDocument3 pagesSolutions Manual For Electric Circuit Analysis David JohnsonVentasVentas9% (44)
- Eddy Current Inspection 20 Question QuizDocument4 pagesEddy Current Inspection 20 Question QuizThinesh Shankar ThineshNo ratings yet
- Momentum Practice Problems: Physics Chapter 8Document23 pagesMomentum Practice Problems: Physics Chapter 8Sander PoldoNo ratings yet
- NICE3000 - Technical Manual-060710Document109 pagesNICE3000 - Technical Manual-060710Ken Lee100% (8)
- 132KV Grid Larkana Site MZ Thesis2Document76 pages132KV Grid Larkana Site MZ Thesis2Zubair Ahmed100% (1)
- Quiz 9Document24 pagesQuiz 9Tarun BhattNo ratings yet
- Dry Type Power TransformersDocument14 pagesDry Type Power TransformersConstantin Dorinel100% (2)
- EES 612 Course OutlineDocument5 pagesEES 612 Course OutlineJoseph DNo ratings yet
- 25 06 2016 EeeDocument80 pages25 06 2016 Eeemurugavelrajan.kNo ratings yet
- Class IX Lesson PlanDocument5 pagesClass IX Lesson Planmadhu sudhanNo ratings yet
- Mk5pfc ArticleDocument24 pagesMk5pfc ArticleenzolnNo ratings yet
- Deflection of TrussesDocument9 pagesDeflection of TrussesfranckoNo ratings yet
- Lab 2 Experiment Polygon of ForcesDocument18 pagesLab 2 Experiment Polygon of ForcesalexNo ratings yet
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet