You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MA200 Instruction Manual PDFDocument107 pagesMA200 Instruction Manual PDFwalkerbhoNo ratings yet
- Ims ManualDocument148 pagesIms ManualAnubhav Srivastav100% (1)
- Logarithm sht2Document3 pagesLogarithm sht2Ainee100% (1)
- Level_Correction_GuideDocument5 pagesLevel_Correction_GuideAkoKhalediNo ratings yet
- AP Chemistry Chapter 4 Quiz Multiple Choice QuestionsDocument5 pagesAP Chemistry Chapter 4 Quiz Multiple Choice QuestionsMani MuruganNo ratings yet
- Understanding Electricity Through Key ConceptsDocument3 pagesUnderstanding Electricity Through Key ConceptsAjith 007No ratings yet
- Applied Management Science Lawrence 2Nd Edition SolutionsDocument3 pagesApplied Management Science Lawrence 2Nd Edition Solutionsptanoy8No ratings yet
- Apappolo Steel BrochureDocument16 pagesApappolo Steel BrochuresunilbholNo ratings yet
- Math RefresherDocument26 pagesMath RefresherLime EmilyNo ratings yet
- Reel Capacity Calculation GuideDocument1 pageReel Capacity Calculation GuideAmalita CementoNo ratings yet
- Design calculations for solar panel support structureDocument7 pagesDesign calculations for solar panel support structureAnonymous sfkedkymNo ratings yet
- Implementing Newton-Raphson Method in MATLABDocument5 pagesImplementing Newton-Raphson Method in MATLABHafeez AliNo ratings yet
- LAB 1-Projectile MotionDocument4 pagesLAB 1-Projectile MotionNilay Mehta100% (2)
- Designing for Intelligibility vs Audibility in Mass Notification SystemsDocument11 pagesDesigning for Intelligibility vs Audibility in Mass Notification SystemsshameemNo ratings yet
- POD Tutorial: Proper Orthogonal Decomposition ExplainedDocument22 pagesPOD Tutorial: Proper Orthogonal Decomposition ExplainedAfiorNo ratings yet
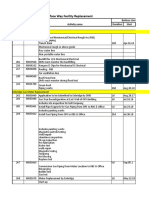
- TTC Hillcrest Complex - Surface Way Facility Replacement: # Activity I.D Activity Name Buttcon Limited Duration StartDocument6 pagesTTC Hillcrest Complex - Surface Way Facility Replacement: # Activity I.D Activity Name Buttcon Limited Duration StartbenjNo ratings yet
- Measure the Speed of Sound with Ultrasonic TransducersDocument3 pagesMeasure the Speed of Sound with Ultrasonic TransducersJoseGarciaRuizNo ratings yet
- CE Board Nov 2021 - Geotechnical Engineering - Set 5Document2 pagesCE Board Nov 2021 - Geotechnical Engineering - Set 5Lemuel TeopeNo ratings yet
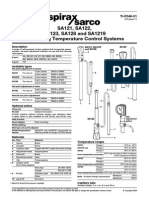
- Sa121 128Document2 pagesSa121 128Abhijit KerkarNo ratings yet
- A311A311M-04 (2015) Standard Specification For Cold-Drawn, Stress-Relieved Carbon Steel Bars Subject To Mechanical Property RequirementsDocument4 pagesA311A311M-04 (2015) Standard Specification For Cold-Drawn, Stress-Relieved Carbon Steel Bars Subject To Mechanical Property RequirementsvantayusdNo ratings yet
- Neutron Noise Analysis of Simulated Reactor PerturbationsDocument20 pagesNeutron Noise Analysis of Simulated Reactor PerturbationsKhangBomNo ratings yet
- Concise Chapterwise Class XII Revision NotesDocument15 pagesConcise Chapterwise Class XII Revision Notespc 11No ratings yet
- Functions Equations Question Bank Answer SheetDocument88 pagesFunctions Equations Question Bank Answer SheetRita LimNo ratings yet
- Alex H.: Penguin ProjectDocument13 pagesAlex H.: Penguin Projectapi-504550016No ratings yet
- Repairs and Maintenance: Service ManualDocument152 pagesRepairs and Maintenance: Service ManualCarlosNo ratings yet
- Basement Walls Design Calculations and Reinforcement DetailsDocument4 pagesBasement Walls Design Calculations and Reinforcement DetailsIbrahim MostazidNo ratings yet
- Stirling Engine PPT1Document19 pagesStirling Engine PPT1Umar RajputNo ratings yet
- Theory Behind BrainWave GeneratorDocument2 pagesTheory Behind BrainWave Generatorjmherrera00No ratings yet
- Auto Collimator SDocument7 pagesAuto Collimator SRamanjooloo DeelanNo ratings yet
- 1 Phase SpaceDocument1 page1 Phase Spaceaaditya3015No ratings yet