You might also like
- Antenna Azimuth Controller DesignDocument17 pagesAntenna Azimuth Controller DesignNisa Ien100% (5)
- Lab 1 Control SystemDocument39 pagesLab 1 Control SystemMuhd Ikram ShabryNo ratings yet
- DC Motor ModelingDocument5 pagesDC Motor ModelingAbeer ChaudhryNo ratings yet
- BS Iec 62233-2005Document48 pagesBS Iec 62233-2005mosmar20No ratings yet
- Lab Report CS 5Document6 pagesLab Report CS 5ubaidNo ratings yet
- PID ControllerDocument22 pagesPID ControllerannonymousNo ratings yet
- CS LabReport 5Document7 pagesCS LabReport 5Muhammad AfzaalNo ratings yet
- Practical Sessions GuideDocument22 pagesPractical Sessions GuideAnton FerreNo ratings yet
- 10 Vertical Take Off and Landing ControlDocument27 pages10 Vertical Take Off and Landing ControlkalyanNo ratings yet
- Lab Report: ObjectivesDocument7 pagesLab Report: ObjectivesubaidNo ratings yet
- Lab 05 (Servo)Document4 pagesLab 05 (Servo)hitesh89No ratings yet
- Frequency Response Lab Manual Mar 2022Document10 pagesFrequency Response Lab Manual Mar 2022Thant Zaw AungNo ratings yet
- Frequency ResponseDocument10 pagesFrequency ResponseClementNo ratings yet
- Angular Position Control2Document8 pagesAngular Position Control2Shankar ArunmozhiNo ratings yet
- Ch.01-Anh Huy Linh PhuongDocument16 pagesCh.01-Anh Huy Linh PhuongĐỗ Thiện HiệpNo ratings yet
- Control Engineering Lab Manual Part 2Document11 pagesControl Engineering Lab Manual Part 2UmerShahzadQurashi100% (1)
- Electrical Circuit Exp 3Document12 pagesElectrical Circuit Exp 3Sarah Irbah SNo ratings yet
- 03b App751 Optional Ocelementshandson r9 PDFDocument8 pages03b App751 Optional Ocelementshandson r9 PDFabdelmouen larfiNo ratings yet
- Exp 4 Familiarization With The TFUDocument8 pagesExp 4 Familiarization With The TFUusmpowerlabNo ratings yet
- DC-motor Modelling and Parameter IdentificationDocument22 pagesDC-motor Modelling and Parameter IdentificationGeorge IskanderNo ratings yet
- Experiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsDocument6 pagesExperiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsdeepakNo ratings yet
- ELE2101 Mod 4 - Some Control System HardwareDocument54 pagesELE2101 Mod 4 - Some Control System HardwareRavneet kaurNo ratings yet
- CS Lab ManualDocument28 pagesCS Lab Manualkcop111No ratings yet
- Lab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer SpeedDocument11 pagesLab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer Speedsairafi100% (3)
- Lab 8a &10a - Modeling of DC Motor: EGR 345 Dynamics System Modeling and ControlDocument8 pagesLab 8a &10a - Modeling of DC Motor: EGR 345 Dynamics System Modeling and ControledlerandrewNo ratings yet
- DILLION TENSIOMETRO Quickcheck - UDocument20 pagesDILLION TENSIOMETRO Quickcheck - Ugustavo.becerraNo ratings yet
- Sample ProblemsDocument2 pagesSample ProblemsAndrew JuanNo ratings yet
- Design of Antiwindup AVR For Synchronous Generator Using Matlab SimulationDocument9 pagesDesign of Antiwindup AVR For Synchronous Generator Using Matlab SimulationusefiNo ratings yet
- Exp 3Document6 pagesExp 3Dinesh ReddyNo ratings yet
- Home Assignment DC Motor Control1Document7 pagesHome Assignment DC Motor Control1jegjegtNo ratings yet
- CS7Document8 pagesCS7zubairashrafNo ratings yet
- Report On Comprehensive Work by Nagendra Shete Swapnil BharatiDocument27 pagesReport On Comprehensive Work by Nagendra Shete Swapnil BharatiNagendra SheteNo ratings yet
- Astable MultivibratorDocument3 pagesAstable MultivibratorTushar GuptaNo ratings yet
- 0 Lab6 Astable MultivibratorDocument3 pages0 Lab6 Astable Multivibratorchandu3072002No ratings yet
- Overreaching of The Impedance Characteristic Using Automated TestingDocument4 pagesOverreaching of The Impedance Characteristic Using Automated Testingjaved shaikh chaandNo ratings yet
- Control Systems Lab ManualDocument67 pagesControl Systems Lab ManualRockstar Rich100% (1)
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- Electrical AssgnDocument2 pagesElectrical Assgndekhte rahoNo ratings yet
- Experiment3 ForcedOscillation G34 ECE2023Document13 pagesExperiment3 ForcedOscillation G34 ECE2023Trần QuânNo ratings yet
- (M1-LAB) Lab Activity 1 - The DC Series MotorDocument7 pages(M1-LAB) Lab Activity 1 - The DC Series MotorApéx PredatorNo ratings yet
- Power Electronics: Control : Home Assignment A1: Speed Control With DC MachineDocument7 pagesPower Electronics: Control : Home Assignment A1: Speed Control With DC MachinebmmostefaNo ratings yet
- Marcial Activity8 Group3Document5 pagesMarcial Activity8 Group3Diane MarcialNo ratings yet
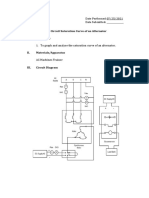
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- Lab 4Document4 pagesLab 4Vu LeNo ratings yet
- Wind Tunnel LabDocument11 pagesWind Tunnel LabshmomenyNo ratings yet
- Minimization of Torque Ripple in Switched Reluctance Motor Drives Using Direct Instantaneous Torque ControlDocument5 pagesMinimization of Torque Ripple in Switched Reluctance Motor Drives Using Direct Instantaneous Torque ControlAnel Bey TahirbegoviçNo ratings yet
- LABreportcommsDocument5 pagesLABreportcommsNoriel MendozaNo ratings yet
- Testing Numerical Transformer Diff RelaysDocument11 pagesTesting Numerical Transformer Diff Relayshizbi70% (1)
- Lab 1 Report: Ho Nguyen Bao Tran Le Huynh Minh NguyetDocument20 pagesLab 1 Report: Ho Nguyen Bao Tran Le Huynh Minh NguyetBin BinNo ratings yet
- 2.004 Dynamics and Control Ii: Mit OpencoursewareDocument7 pages2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaNo ratings yet
- Mis: 112009033 Name: Yoshit Tapar: Experiment No.1Document13 pagesMis: 112009033 Name: Yoshit Tapar: Experiment No.1Yoshit TaparNo ratings yet
- Mis: 112009033 Name: Yoshit Tapar: Experiment No.1Document13 pagesMis: 112009033 Name: Yoshit Tapar: Experiment No.1Yoshit TaparNo ratings yet
- 2142 2 Frequency Response: Semester 5Document9 pages2142 2 Frequency Response: Semester 5Dwayne JohnsonNo ratings yet
- Control Lab PDFDocument76 pagesControl Lab PDFMohamed BenrahalNo ratings yet
- Ece 213 Lab Report 8Document7 pagesEce 213 Lab Report 8api-457533213No ratings yet
- Exp02v H1Document6 pagesExp02v H1jaswinder singhNo ratings yet
- Function GeneratorDocument13 pagesFunction GeneratorDilJalaayNo ratings yet
- CEIC3006 Lab 2 ReportDocument18 pagesCEIC3006 Lab 2 ReportAdzamNo ratings yet
- 1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorDocument5 pages1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorRajalakshmi TVNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Internship Report PifdDocument15 pagesInternship Report PifdubaidNo ratings yet
- Fa18 Bee 121 - Vlsi CepDocument16 pagesFa18 Bee 121 - Vlsi CepubaidNo ratings yet
- Name Ubaid Ur Rehman Reg No FA18-BEE-121-E LAB #6 To Describe The Syntax of 8086-88 CPU Assembly Language Using Emu8086 ObjectivesDocument3 pagesName Ubaid Ur Rehman Reg No FA18-BEE-121-E LAB #6 To Describe The Syntax of 8086-88 CPU Assembly Language Using Emu8086 ObjectivesubaidNo ratings yet
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
- Lab 10Document9 pagesLab 10ubaidNo ratings yet
- Winter Task (Class 3)Document53 pagesWinter Task (Class 3)ubaidNo ratings yet
- Name Ubaid Ur Rehman Reg No FA18-BEE-121-E LAB #1 This Lab Has Been Designed To Familiarize With The Software EMU8086. Objectives MethodologyDocument2 pagesName Ubaid Ur Rehman Reg No FA18-BEE-121-E LAB #1 This Lab Has Been Designed To Familiarize With The Software EMU8086. Objectives MethodologyubaidNo ratings yet
- Lab Report CS 12Document4 pagesLab Report CS 12ubaidNo ratings yet
- COMSATS University Islamabad, Lahore Campus Sessional-II Exam - Semester FALL 2020Document2 pagesCOMSATS University Islamabad, Lahore Campus Sessional-II Exam - Semester FALL 2020ubaidNo ratings yet
- Lab Report CS 8Document7 pagesLab Report CS 8ubaidNo ratings yet
- Lab Report CS 2Document9 pagesLab Report CS 2ubaidNo ratings yet
- Lab Report CS 4Document8 pagesLab Report CS 4ubaidNo ratings yet
- Lab Report CS 7Document4 pagesLab Report CS 7ubaidNo ratings yet
- Lab Report CS 9Document7 pagesLab Report CS 9ubaidNo ratings yet
- Lab Report CS 8Document7 pagesLab Report CS 8ubaidNo ratings yet
- Lab Report CS 12Document4 pagesLab Report CS 12ubaidNo ratings yet
- Lab Report CS 11Document4 pagesLab Report CS 11ubaidNo ratings yet
- Template Cep ProposalDocument3 pagesTemplate Cep ProposalubaidNo ratings yet
- A 9GSps 1.125-GHz BW Oversampling Continuous-Time Pipeline ADC Achieving - 164dBFSpHz NSDDocument16 pagesA 9GSps 1.125-GHz BW Oversampling Continuous-Time Pipeline ADC Achieving - 164dBFSpHz NSDHoang NguyenNo ratings yet
- (PEER-TURNER) Influence of Kinematic SSI On Foundation Input Motions For Bridges On Deep FoundationsDocument226 pages(PEER-TURNER) Influence of Kinematic SSI On Foundation Input Motions For Bridges On Deep Foundationshal9000_mark1No ratings yet
- Simulink Tutorial PDFDocument34 pagesSimulink Tutorial PDFsvp3761No ratings yet
- PID Control: Modeling Controls Tutorials Menu Root LocusDocument9 pagesPID Control: Modeling Controls Tutorials Menu Root LocusXavier Freire ZamoraNo ratings yet
- Course DescribtionDocument57 pagesCourse DescribtionDuaa OriginalNo ratings yet
- Integrated Chassis Control Classification AnalysisDocument34 pagesIntegrated Chassis Control Classification Analysisyogita borudeNo ratings yet
- Diagnostic Techniques Used in Power Transformer Turn To Turn Faults Identification Based On Sweep Frequency Response Analysis (SFRA)Document7 pagesDiagnostic Techniques Used in Power Transformer Turn To Turn Faults Identification Based On Sweep Frequency Response Analysis (SFRA)Jonas PedrosoNo ratings yet
- Mass Spring System: ObjectiveDocument5 pagesMass Spring System: ObjectiveHafeez AliNo ratings yet
- EE704 Control Systems 2 (2006 Scheme)Document56 pagesEE704 Control Systems 2 (2006 Scheme)Anith KrishnanNo ratings yet
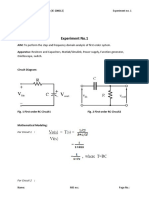
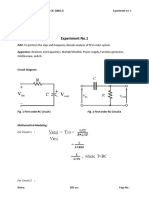
- Chapter 5: Dynamic Behavior of First-Order and Second-Order ProcessesDocument21 pagesChapter 5: Dynamic Behavior of First-Order and Second-Order Processesmuhamed mahmoodNo ratings yet
- Control Engineering PDFDocument164 pagesControl Engineering PDFsanthoshramrNo ratings yet
- Fourier Series: Faculty of Electrical and Electronics EngineeringDocument60 pagesFourier Series: Faculty of Electrical and Electronics EngineeringDuc Anh NguyễnNo ratings yet
- BS Iso 7401-2011 - (2020-11-09 - 12-15-00 PM) PDFDocument34 pagesBS Iso 7401-2011 - (2020-11-09 - 12-15-00 PM) PDFdenizinakNo ratings yet
- On The Modeling of Twin Rotor Mimo System Using Chirp Inputs As Test SignalsDocument10 pagesOn The Modeling of Twin Rotor Mimo System Using Chirp Inputs As Test SignalsjilitwoNo ratings yet
- Block Diagram of Electromechanical SystemDocument20 pagesBlock Diagram of Electromechanical SystemSandeep ReddyNo ratings yet
- S5 SylabusDocument24 pagesS5 SylabuspaajiNo ratings yet
- Interference & Shadowing MarginDocument33 pagesInterference & Shadowing Marginpb100% (1)
- Simulation of Temperature Controller For An Injection Mould Machine Using Fuzzy LogicDocument11 pagesSimulation of Temperature Controller For An Injection Mould Machine Using Fuzzy LogicRahmadBòzNo ratings yet
- Control Lab HIT JKMDocument19 pagesControl Lab HIT JKMBALAKRISHNANNo ratings yet
- Control System Ece QB EeeeeeeDocument73 pagesControl System Ece QB EeeeeeeARNI JAYACHANDRANo ratings yet
- Bidirectional Fiber Bragg Grating-Circulator Based Optical Add-Drop Multiplexer in DWDM Transmission System With Reduced Channel Spacing at 40 Gb/sDocument6 pagesBidirectional Fiber Bragg Grating-Circulator Based Optical Add-Drop Multiplexer in DWDM Transmission System With Reduced Channel Spacing at 40 Gb/sNam TàoNo ratings yet
- Lec6 PDFDocument23 pagesLec6 PDFNizmy NazeerNo ratings yet
- Current-Mode Control Modeling - RidleyDocument9 pagesCurrent-Mode Control Modeling - RidleyKSNo ratings yet
- Ab Initio - V1.2Document29 pagesAb Initio - V1.2Praveen JoshiNo ratings yet
- Electrical Circuits LabDocument64 pagesElectrical Circuits LabraveendrababupNo ratings yet
- Transfer Function of Electrical and Mechanical SystemsDocument21 pagesTransfer Function of Electrical and Mechanical SystemsWigmar GonzalezNo ratings yet
- 0898714915Document505 pages0898714915Mery MeryemNo ratings yet