You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 06a 1MA1 3H November 2020 Examination Paper PDF 1Document24 pages06a 1MA1 3H November 2020 Examination Paper PDF 1Finest Aymzino75% (4)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Structural Sealant Glazing: Standard Guide ForDocument52 pagesStructural Sealant Glazing: Standard Guide ForĐường Nguyễn ThừaNo ratings yet
- NOC MathematicsDocument2 pagesNOC MathematicsUnder TakerNo ratings yet
- 03 Crude Oil Emulsion Properties and Their ApplicatioDocument13 pages03 Crude Oil Emulsion Properties and Their ApplicatioAisyah NingsihNo ratings yet
- Calculus For EconomistsDocument187 pagesCalculus For Economistsyirgalemle ayeNo ratings yet
- LOAD & MEMBER CALCULATION FOR PARKING AREA OnsiteDocument7 pagesLOAD & MEMBER CALCULATION FOR PARKING AREA OnsiteCalvin SitorusNo ratings yet
- Thermodynamic Analysis of A 2-Stage Cascade VCR CycleDocument27 pagesThermodynamic Analysis of A 2-Stage Cascade VCR CycleAkshat RNo ratings yet
- SAB4323 OCW Topic 2Document39 pagesSAB4323 OCW Topic 2Ce WinNo ratings yet
- Cognition and Chance - The Psychology of Probabilistic ReasoningDocument532 pagesCognition and Chance - The Psychology of Probabilistic ReasoningSarah PeñaNo ratings yet
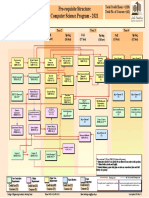
- CS Prerequisite FlowchartDocument1 pageCS Prerequisite FlowchartOmarNo ratings yet
- A31315 DatasheetDocument70 pagesA31315 DatasheetblejekmcNo ratings yet
- Mathematics: Analysis & Approaches: Unit QuestionDocument4 pagesMathematics: Analysis & Approaches: Unit QuestionLorraine SabbaghNo ratings yet
- Swirling Flow-Bluff Body - RANS - 24062019Document35 pagesSwirling Flow-Bluff Body - RANS - 24062019ibrahim boukhNo ratings yet
- WP 407 - Lube Oil SampleDocument6 pagesWP 407 - Lube Oil SampleFelipe100% (1)
- Sample Problem Speed N VelocityDocument15 pagesSample Problem Speed N VelocityEllen DispoNo ratings yet
- Mechanical Engineering (Autumn 2004) : Kedar Gajanan KaleDocument3 pagesMechanical Engineering (Autumn 2004) : Kedar Gajanan KaleNeal RanjanNo ratings yet
- NLC L712SDocument1 pageNLC L712Ssbas.supplier.electrical.tcNo ratings yet
- Lagrangian MechanicsDocument13 pagesLagrangian MechanicsAlda Novita SariNo ratings yet
- ElectrostaticsDocument82 pagesElectrostaticsmeritutorNo ratings yet
- Noc19 Me17 Assignment5Document3 pagesNoc19 Me17 Assignment5mechanicalNo ratings yet
- Momentum Review 2004Document18 pagesMomentum Review 2004GajendraNo ratings yet
- Van Der Knaap - 1959 - Non-Linear Behavior of Elastic Porous MediaDocument9 pagesVan Der Knaap - 1959 - Non-Linear Behavior of Elastic Porous MediaNguyen The DucNo ratings yet
- Optical Illusions: Performance Task Grade 7 - Mathematics Quarter 3Document1 pageOptical Illusions: Performance Task Grade 7 - Mathematics Quarter 3ROSELYN SANTIAGONo ratings yet
- Surface Coating: TechnologyDocument30 pagesSurface Coating: TechnologyAditya v ShandilyaNo ratings yet
- Material Specification Sheet Saarstahl - 51Crv4 (50Crv4)Document3 pagesMaterial Specification Sheet Saarstahl - 51Crv4 (50Crv4)anilNo ratings yet
- Quadratic Equation: By, Prenisha Sanjel Class-12 C2 Exam Symbol No-77s Ps 7558Document17 pagesQuadratic Equation: By, Prenisha Sanjel Class-12 C2 Exam Symbol No-77s Ps 7558aabhushanNo ratings yet
- EE352 Chapter#2 Electromagnetism and Magnetic CurcuitsDocument55 pagesEE352 Chapter#2 Electromagnetism and Magnetic CurcuitsCan ARABACINo ratings yet
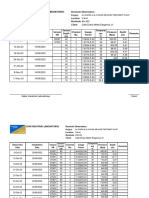
- Water Table Observation - 12 MarchDocument5 pagesWater Table Observation - 12 Marchrupeshkumar642mdsNo ratings yet
- Helical Gear Unit CatalogueDocument80 pagesHelical Gear Unit Catalogueanindya.basu859217No ratings yet
- 1 Nature of MathematicsDocument15 pages1 Nature of MathematicsAngelica GeronNo ratings yet