You might also like
- Research Methods and Bioethics Statistical AssignmentDocument4 pagesResearch Methods and Bioethics Statistical AssignmentJishnu ChaudhuriNo ratings yet
- Data StructuresDocument131 pagesData Structuressri171064100% (1)
- Market AnalyticsDocument35 pagesMarket Analyticsshree dalkeNo ratings yet
- TSA Business ReportDocument27 pagesTSA Business ReportSudesh0% (1)
- Excel Practice Assignment 1Document5 pagesExcel Practice Assignment 1singhshekar230No ratings yet
- Tree Example - Hitters - Jupyter NotebookDocument10 pagesTree Example - Hitters - Jupyter Notebookeleni giannopoulouNo ratings yet
- Measuring Process Capability of Manufacturing ExperimentsDocument12 pagesMeasuring Process Capability of Manufacturing ExperimentsAman NagraleNo ratings yet
- Competitive Bidding StrategyDocument38 pagesCompetitive Bidding StrategyKen WongNo ratings yet
- PAES 302 guide flat beltsDocument9 pagesPAES 302 guide flat beltsMario Labitad Anore Jr.No ratings yet
- Category 6 Cable: DescriptionDocument2 pagesCategory 6 Cable: DescriptionkapilNo ratings yet
- Data StructureDocument137 pagesData StructureZahid KhanNo ratings yet
- Assignment 1Document9 pagesAssignment 1Harsha Vardhan ReddyNo ratings yet
- Earnings per Share Test Between 1991 and 1992Document43 pagesEarnings per Share Test Between 1991 and 1992Sagar ChauhanNo ratings yet
- Indice IntraindustrialDocument17 pagesIndice IntraindustrialJuan Camilo ArboledaNo ratings yet
- PNS PAES 302-2000 - Engineering Materials - Flat Belts and Pulleys - Specifications and ApplicatiDocument17 pagesPNS PAES 302-2000 - Engineering Materials - Flat Belts and Pulleys - Specifications and ApplicatiJohn VelacioNo ratings yet
- Pavement Deflection AnalysisDocument8 pagesPavement Deflection AnalysisnaveenNo ratings yet
- 838823Document12 pages838823axgarcescatonNo ratings yet
- Sample of ForecastingDocument18 pagesSample of ForecastingMohammad KamruzzamanNo ratings yet
- Traffic engineering lab report on speed characteristicsDocument18 pagesTraffic engineering lab report on speed characteristicsSiva EsarapuNo ratings yet
- Admn2607 SD2Document21 pagesAdmn2607 SD2Thomas-Jay DerbyshireNo ratings yet
- Vakhtang Tsiklauri MidtermDocument17 pagesVakhtang Tsiklauri MidtermVakhtang TsiklauriNo ratings yet
- Dampers - Contractor RateDocument1 pageDampers - Contractor RateJohn ANo ratings yet
- Result Phase III- A,B_lot (23!03!2024)Document15 pagesResult Phase III- A,B_lot (23!03!2024)xxxlordimpalerxxxNo ratings yet
- Enrollment and Graduation in Electronics Sector ProgramsDocument12 pagesEnrollment and Graduation in Electronics Sector ProgramsjohnNo ratings yet
- Dimensions and Weights for Anchor Chains and FittingsDocument4 pagesDimensions and Weights for Anchor Chains and FittingsOzata TersanesiNo ratings yet
- Imds Fe: Imda 2017Document7 pagesImds Fe: Imda 2017Davila Yalli JhonNo ratings yet
- Q 1 RDocument18 pagesQ 1 RChirag KashyapNo ratings yet
- Cálculos Muestra37-S3 200 080515Document798 pagesCálculos Muestra37-S3 200 080515Laura_Cruz_GilNo ratings yet
- ALLDESC CumulativeDocument1 pageALLDESC Cumulativeamonia655No ratings yet
- 4769 10 LedDocument3 pages4769 10 LedAlejandro Paez DiazNo ratings yet
- Export Ac I OnesDocument7 pagesExport Ac I OnesJuan Camilo ArboledaNo ratings yet
- SMS Project ReportDocument12 pagesSMS Project Reportshafikul37No ratings yet
- MITS5509 Intelligent Systems For Analytics: Assignment 3Document10 pagesMITS5509 Intelligent Systems For Analytics: Assignment 3Aimen AslamNo ratings yet
- Alternative Gann CalculatorDocument4 pagesAlternative Gann Calculatorsandip_exl100% (1)
- Ejercicio Numero 2Document3 pagesEjercicio Numero 2Mijael Jean Pierre Orbegoso HuanccolluchoNo ratings yet
- Homework 2 Supermarket Sales Commercials RegressionDocument5 pagesHomework 2 Supermarket Sales Commercials Regressionspringfield12No ratings yet
- Ahmad Faizal - Tugas 6Document5 pagesAhmad Faizal - Tugas 6Muhamad Alam NasraNo ratings yet
- Problem: Compute PI Using A Monte Carlo Approach in C With OpenMP.Document3 pagesProblem: Compute PI Using A Monte Carlo Approach in C With OpenMP.Ioan Simion BelbeNo ratings yet
- SMS Project ReportDocument13 pagesSMS Project Reportshafikul37No ratings yet
- Lab 4+rubric-Isometric DrawingDocument8 pagesLab 4+rubric-Isometric DrawingSyahmi AmriNo ratings yet
- Exam Results Fit To A Normal DistributionDocument10 pagesExam Results Fit To A Normal DistributionSalokhaRaj RedevelopmentNo ratings yet
- Ammonium Sulfate Saturation TableDocument4 pagesAmmonium Sulfate Saturation Tableritesh kumarNo ratings yet
- Run Cost AnalysisDocument5 pagesRun Cost AnalysisDevrath Bangalore BangaloreNo ratings yet
- Demand Estimation Using RegressionDocument7 pagesDemand Estimation Using RegressionMoidin AfsanNo ratings yet
- Assignment 2 SolutionDocument4 pagesAssignment 2 SolutionshwetapooranibalasubramanianNo ratings yet
- 23 HomesDocument2 pages23 HomesQuốc Huy TrầnNo ratings yet
- Auditorium TX - Dimensions - and - Capacity - GuideDocument2 pagesAuditorium TX - Dimensions - and - Capacity - GuideChong Hong RuiNo ratings yet
- Linear Trend Line Forecast: Year Printers Forecas T Error 1 2 3 4 5 6 7 8 9 10 11Document4 pagesLinear Trend Line Forecast: Year Printers Forecas T Error 1 2 3 4 5 6 7 8 9 10 11SURAJ GAVITNo ratings yet
- Technological University of the Philippines-Taguig BSc Mechanical Engineering Quiz 2: Frequency Data AnalysisDocument2 pagesTechnological University of the Philippines-Taguig BSc Mechanical Engineering Quiz 2: Frequency Data AnalysisDhayane RedoquerioNo ratings yet
- Potency & Rate SettingsDocument41 pagesPotency & Rate SettingseuroconsultbgNo ratings yet
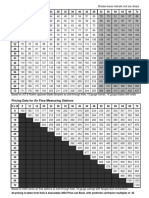
- Table B.3 (C) Discharge Table For Smooth Nozzles (Nozzle Pressure Measured by Pitot Gauge)Document1 pageTable B.3 (C) Discharge Table For Smooth Nozzles (Nozzle Pressure Measured by Pitot Gauge)Gerardo AlcalaNo ratings yet
- Sob 1040Document8 pagesSob 1040Chisanga Wise Sage KabweNo ratings yet
- Lab 04Document10 pagesLab 04Woods FourNo ratings yet
- UntitledDocument3 pagesUntitledBMET-SEIP PIUNo ratings yet
- Camiones por año en EcuadorDocument7 pagesCamiones por año en EcuadorYulieth CuacialpudNo ratings yet
- Remote-controlled hybrid plough machine design and simulationDocument15 pagesRemote-controlled hybrid plough machine design and simulationmk khanNo ratings yet
- Quantity Total Time: Scatter DiagramDocument9 pagesQuantity Total Time: Scatter DiagramGrace WilsonNo ratings yet
- Dimensions Butt Weld Elbows 45°-90° LR & 3D according to ASME B16.9Document4 pagesDimensions Butt Weld Elbows 45°-90° LR & 3D according to ASME B16.9mohammed dallyNo ratings yet
- Auto Table Up To Unlimited NumberDocument21 pagesAuto Table Up To Unlimited NumberSimranNo ratings yet
- Case Study GP6 LatesDocument14 pagesCase Study GP6 LatesMuhd Syazmi F1050No ratings yet
- Date Problem CodeDocument2 pagesDate Problem CodeStenZiL PandeyNo ratings yet
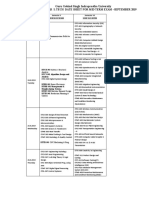
- Final Regular University DatesheetOdd Sept, 2019 - DISPLAYDocument2 pagesFinal Regular University DatesheetOdd Sept, 2019 - DISPLAYStenZiL PandeyNo ratings yet
- 11 Venezuela November 2017Document8 pages11 Venezuela November 2017AbhinavHarshalNo ratings yet
- Python code to count pairs in a listDocument1 pagePython code to count pairs in a listStenZiL PandeyNo ratings yet
- 0cdainternal Marks May 2019 All Branch PDFDocument29 pages0cdainternal Marks May 2019 All Branch PDFStenZiL PandeyNo ratings yet
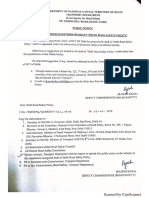
- Road Safety Doit Delhi PDFDocument10 pagesRoad Safety Doit Delhi PDFStenZiL PandeyNo ratings yet
- Student Design Project Format (Student)Document6 pagesStudent Design Project Format (Student)StenZiL PandeyNo ratings yet
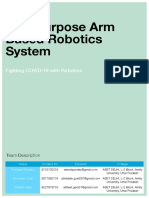
- MARS Multipurpose Arm Based Robotics System Fighting COVID-19Document4 pagesMARS Multipurpose Arm Based Robotics System Fighting COVID-19StenZiL PandeyNo ratings yet
- Personal Companion: Guide - Ms. Nishi GuptaDocument14 pagesPersonal Companion: Guide - Ms. Nishi GuptaStenZiL PandeyNo ratings yet
- Forecasting Demand Using Time Series ModelsDocument58 pagesForecasting Demand Using Time Series ModelsPavithra Gowtham100% (1)
- ELEC5300 Lecture2 2020Document62 pagesELEC5300 Lecture2 2020JY TanNo ratings yet
- Es884engineered Science-2023Document16 pagesEs884engineered Science-2023HAFEDH ABIDNo ratings yet
- Prediction Rainfall With Regression AnalysisDocument12 pagesPrediction Rainfall With Regression AnalysisIJRASETPublications100% (1)
- Capital Structure and Firm Performance - : A Study of Swedish Public CompaniesDocument44 pagesCapital Structure and Firm Performance - : A Study of Swedish Public CompaniesDipankar SâháNo ratings yet
- Compressive Strength and Split Tensile StrengthDocument8 pagesCompressive Strength and Split Tensile StrengthAdarsh PNo ratings yet
- AI Foundations and Applications: 4. Linear RegressionDocument31 pagesAI Foundations and Applications: 4. Linear RegressionLavidaNo ratings yet
- Determinants of Micro and Small Enterprises Growth in Ethiopia: The Case of Nekemte Town of Oromia Region, EthiopiaDocument14 pagesDeterminants of Micro and Small Enterprises Growth in Ethiopia: The Case of Nekemte Town of Oromia Region, EthiopiaBiniyam YitbarekNo ratings yet
- Modeling Artificial Neural Network with One Step Secant Backpropagation Algorithm in Rupiah Exchange Rate Return Against US DollarDocument10 pagesModeling Artificial Neural Network with One Step Secant Backpropagation Algorithm in Rupiah Exchange Rate Return Against US DollarGeofanggaNo ratings yet
- Overview and Recent Advances in Partial Least Squares: Lecture Notes in Computer Science November 2005Document19 pagesOverview and Recent Advances in Partial Least Squares: Lecture Notes in Computer Science November 2005Liliana ForzaniNo ratings yet
- Spatial Uncertainty of A Geoid Undulation Model in Guayaquil, EcuadorDocument11 pagesSpatial Uncertainty of A Geoid Undulation Model in Guayaquil, EcuadorMaulitaNo ratings yet
- ML Important TopicDocument13 pagesML Important TopicYt FanfestNo ratings yet
- 016 BackPropagation Model Iij - Vol8 - No2 - 2016 - WimatraDocument9 pages016 BackPropagation Model Iij - Vol8 - No2 - 2016 - WimatraayubNo ratings yet
- Demand Metrics Excel TemplateDocument14 pagesDemand Metrics Excel TemplateumeshjmangroliyaNo ratings yet
- Experiment No. 1 Discretization of Signals: Sampling and ReconstructionDocument19 pagesExperiment No. 1 Discretization of Signals: Sampling and Reconstructionraghav dhamaniNo ratings yet
- Comparative Analysis of Time-Series Forecasting Algorithms For Stock Pice Prediction 2019Document6 pagesComparative Analysis of Time-Series Forecasting Algorithms For Stock Pice Prediction 2019nurdi afriantoNo ratings yet
- SLR NotesDocument96 pagesSLR NotesRafi DawarNo ratings yet
- ANOVA and Regression AnalysisDocument8 pagesANOVA and Regression Analysis21P410 - VARUN MNo ratings yet
- ch17 SolutionsDocument71 pagesch17 Solutionsmohlin.robertNo ratings yet
- Ministry of Education and Training Ueh University - Ueh College of Business School of International Business - MarketingDocument26 pagesMinistry of Education and Training Ueh University - Ueh College of Business School of International Business - MarketingTracy M.No ratings yet
- DIP Basics and Rectification - 2Document43 pagesDIP Basics and Rectification - 2Bhuvana EswariNo ratings yet
- Forecasting For Inventory Management of Service PaDocument29 pagesForecasting For Inventory Management of Service PaFernando GómezNo ratings yet
- Improving permeability prediction via Machine LearningDocument20 pagesImproving permeability prediction via Machine Learningmostafa khalidNo ratings yet
- 46-Book Manuscript-325-1-10-20220103Document442 pages46-Book Manuscript-325-1-10-20220103celal.sagir.0No ratings yet
- Lecture 2Document157 pagesLecture 2Sandra Luz Canchola MagdalenoNo ratings yet
- Chapter 6 Solutions Solution Manual Introductory Econometrics For FinanceDocument11 pagesChapter 6 Solutions Solution Manual Introductory Econometrics For FinanceNazim Uddin MahmudNo ratings yet
- Optimazation of the Cutting Parameters During CNC Plasma Arc CuttingDocument8 pagesOptimazation of the Cutting Parameters During CNC Plasma Arc Cuttingseebass srosrNo ratings yet
- Prediction of Bearing Remaining Useful Life Based On LSTM NetworkDocument10 pagesPrediction of Bearing Remaining Useful Life Based On LSTM NetworkhaceneNo ratings yet
- Introduction To Data Science: Hui Lin and Ming LiDocument403 pagesIntroduction To Data Science: Hui Lin and Ming LiTariqNo ratings yet