You might also like
- ELEC2142 Week 1 Class NewadditionalDocument48 pagesELEC2142 Week 1 Class NewadditionalJoseph NguyenNo ratings yet
- Chapter 6: Introduction To ARM Memory and Assembly LanguageDocument46 pagesChapter 6: Introduction To ARM Memory and Assembly LanguageVeer KumarNo ratings yet
- ARM - An Understanding and MoreDocument87 pagesARM - An Understanding and MoreSivasini Netra S ANo ratings yet
- Notes Mpgl1 Chapter6Document46 pagesNotes Mpgl1 Chapter6Joshua DuffyNo ratings yet
- Tutorials: Introduction To Arm Processors: A Bit of ARM HistoryDocument3 pagesTutorials: Introduction To Arm Processors: A Bit of ARM HistoryMohammed Siyad BNo ratings yet
- Arm Exploitation PDFDocument57 pagesArm Exploitation PDFjokllNo ratings yet
- 1.evolution and Improvement of ARM ArchitectDocument35 pages1.evolution and Improvement of ARM ArchitectRohini0% (1)
- Module 4Document82 pagesModule 4Rakesh LodhiNo ratings yet
- ArmDocument203 pagesArmJannathul Firdous MohamedNo ratings yet
- InterruptsDocument28 pagesInterruptsJuan Pablo IñigoNo ratings yet
- Interrupt and Exception Handling On Hercules™ ARM Cortex - R4/5-Based MicrocontrollersDocument16 pagesInterrupt and Exception Handling On Hercules™ ARM Cortex - R4/5-Based MicrocontrollersTuyen DinhNo ratings yet
- ARM ArchitectureDocument85 pagesARM ArchitectureGurram KishoreNo ratings yet
- ARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityDocument116 pagesARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityRANJITHANo ratings yet
- Ios2 IntroductionDocument21 pagesIos2 IntroductionJoel David Delgado PerdomoNo ratings yet
- Unit3 ARM Cortex ArchitectureDocument112 pagesUnit3 ARM Cortex ArchitectureAyush GohatreNo ratings yet
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarNo ratings yet
- By: Abhishek Pande 13BEI0004 Submitted To: Prof. V RameshDocument30 pagesBy: Abhishek Pande 13BEI0004 Submitted To: Prof. V RameshSlaney AguiarNo ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 ArchitectureNarasimha Murthy YayavaramNo ratings yet
- ARM Embedded Hardware Design Lecture on Processor Models and RegistersDocument42 pagesARM Embedded Hardware Design Lecture on Processor Models and RegistersD StarNo ratings yet
- ESRTPDocument13 pagesESRTPadvaitkaleNo ratings yet
- ARM7 ARCHITECTURE OVERVIEWDocument8 pagesARM7 ARCHITECTURE OVERVIEWVipin TiwariNo ratings yet
- Seminar on Architectures and Design Methods for Embedded Systems: Architecture of ARM Processor FamilyDocument27 pagesSeminar on Architectures and Design Methods for Embedded Systems: Architecture of ARM Processor FamilySree Harsha VemulapalliNo ratings yet
- Arm Intro l01Document47 pagesArm Intro l01Tanishq GuptaNo ratings yet
- ARM Instr Set PDFDocument116 pagesARM Instr Set PDFnaveenNo ratings yet
- The ARM Architecture The ARM ArchitectureDocument26 pagesThe ARM Architecture The ARM ArchitecturesudhirNo ratings yet
- Arm NotesDocument22 pagesArm NotesShreya SatheeshNo ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 Architecturejinto0007No ratings yet
- Tut Nios2 IntroductionDocument22 pagesTut Nios2 IntroductionPallavi DikshitNo ratings yet
- Tut Nios2 Introduction (Assembler)Document23 pagesTut Nios2 Introduction (Assembler)David Arévalo JiménezNo ratings yet
- Unit IV MPMCDocument22 pagesUnit IV MPMCDeepika SanalaNo ratings yet
- Introduction To Processor Design & The ARM ArchitectureDocument65 pagesIntroduction To Processor Design & The ARM Architectureveer_frnd89100% (1)
- Lecture 3Document88 pagesLecture 3Praveen RathnamNo ratings yet
- Arm PPTDocument25 pagesArm PPTsudarsanareddyNo ratings yet
- The First EncounterDocument44 pagesThe First EncounterRANJITHANo ratings yet
- ARM: Advanced RISC MachinesDocument51 pagesARM: Advanced RISC MachinesmohitNo ratings yet
- ARM Notes From NPTELDocument3 pagesARM Notes From NPTELAnonymous pcNdMpNE100% (1)
- Course Name-Microprocessor: Model Institute of Engineering & TechnologyDocument10 pagesCourse Name-Microprocessor: Model Institute of Engineering & Technologyeklavya0304No ratings yet
- Arm FundamentalsDocument32 pagesArm FundamentalsSatyanarayana SankuNo ratings yet
- 18CS44 MODULE1 Chapter2Document38 pages18CS44 MODULE1 Chapter2Jim MoriartyNo ratings yet
- ArmDocument44 pagesArmSiva SankaranNo ratings yet
- Module 4 Topic 2 ARM Processor FundamentalsDocument64 pagesModule 4 Topic 2 ARM Processor FundamentalsDeepti ChandrasekharanNo ratings yet
- Arm ProcessorDocument18 pagesArm ProcessorashokNo ratings yet
- ARM ProcessorDocument88 pagesARM ProcessorAyan AcharyaNo ratings yet
- ARM ArchitectureDocument6 pagesARM ArchitectureCarlos AraujoNo ratings yet
- ARM KDocument32 pagesARM KARPAN KUMAR BHANDARINo ratings yet
- ARM7,9,11 ProcessorDocument34 pagesARM7,9,11 Processorharshad lokhandeNo ratings yet
- ARM Processor 3Document27 pagesARM Processor 3Ayan AcharyaNo ratings yet
- Cisc vs. RiscDocument53 pagesCisc vs. RiscnikitaNo ratings yet
- Chapter 2 - Dr. Syafeeza - 3Document35 pagesChapter 2 - Dr. Syafeeza - 3Weehao SiowNo ratings yet
- ARM ArchitectureDocument30 pagesARM ArchitectureKaran Singh 21BEE1163No ratings yet
- Arm Assembly TutorialDocument85 pagesArm Assembly TutorialZhennan Wang100% (1)
- ARM Processors' - ArchitectureDocument27 pagesARM Processors' - ArchitectureyayavaramNo ratings yet
- Unit-I - : School of Electrical & Electronics Engineering Department of Electronics & InstrumentationDocument190 pagesUnit-I - : School of Electrical & Electronics Engineering Department of Electronics & Instrumentation0901IO201015 ANKIT PATELNo ratings yet
- Unit-8 MPMCDocument22 pagesUnit-8 MPMCMani Kanta ReddyNo ratings yet
- ARMDocument40 pagesARMhifazat aliNo ratings yet
- Acorn RISC MachineDocument6 pagesAcorn RISC Machinesolomon girmaNo ratings yet
- Module - 1: Salient Features of The Cortex-M3Document29 pagesModule - 1: Salient Features of The Cortex-M3Dr Ravi Kumar A.VNo ratings yet
- Project Overview Of: Zigbee Based Mapping and Position TrackingDocument31 pagesProject Overview Of: Zigbee Based Mapping and Position TrackingNaga NikhilNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Appendix B: Running Keil ToolsDocument8 pagesAppendix B: Running Keil ToolsMohammed AlzaaninNo ratings yet
- Introduction To Instruction Sets: v4T and v7-MDocument14 pagesIntroduction To Instruction Sets: v4T and v7-MMohammed AlzaaninNo ratings yet
- Hohl Hinds: Covers TheDocument58 pagesHohl Hinds: Covers TheMohammed AlzaaninNo ratings yet
- CH 10Document26 pagesCH 10Mohammed AlzaaninNo ratings yet
- Spi Bascom AvrDocument7 pagesSpi Bascom AvrYarisSyahmidanNo ratings yet
- FPGA Summer ReportDocument18 pagesFPGA Summer ReportAbhishek RajNo ratings yet
- Fanuc Series 16 Backup ProcedureDocument4 pagesFanuc Series 16 Backup ProcedureYael Abraham GutiérrezNo ratings yet
- Axiomtek NA550Document2 pagesAxiomtek NA550RizqiSetiadiNo ratings yet
- Digital VLSI Design Standard Cell Libraries: Semester A, 2016-17 Lecturer: Dr. Adam TemanDocument32 pagesDigital VLSI Design Standard Cell Libraries: Semester A, 2016-17 Lecturer: Dr. Adam TemanThi NguyenNo ratings yet
- Synclink Gt2/Gt4 Serial Adapter: Hardware User'S ManualDocument18 pagesSynclink Gt2/Gt4 Serial Adapter: Hardware User'S ManualTejeshwar Singh RandhawaNo ratings yet
- 15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesDocument3 pages15ee408 Analog and Digital Integrated Circuits Laboratory 0 0 2 1 Course ObjectivesnandhakumarmeNo ratings yet
- BMW Airbag Reset Tool GuideDocument6 pagesBMW Airbag Reset Tool Guidejpedroblasco14No ratings yet
- Modul de Extensie Detectomat ECB PDFDocument48 pagesModul de Extensie Detectomat ECB PDFSon Goku100% (1)
- 8086 MICROPROCESSOR LAB MANUALDocument14 pages8086 MICROPROCESSOR LAB MANUALhariNo ratings yet
- Mos Two Input Nor and Nand GateDocument12 pagesMos Two Input Nor and Nand GateSimran SNo ratings yet
- From Mainframes To MicroprocessorsDocument8 pagesFrom Mainframes To MicroprocessorsAsif MemonNo ratings yet
- CY62148EV3Document16 pagesCY62148EV3Dario Gabriel Coz RojasNo ratings yet
- 63a4a Compal LA-9161PDocument53 pages63a4a Compal LA-9161PIrfan SaifiNo ratings yet
- Alarm Otomatis: Sistem Kerja AlatDocument12 pagesAlarm Otomatis: Sistem Kerja AlatBastian SalfinusNo ratings yet
- Practical App in EE 03 - Lecture 02 - Proteus 01Document23 pagesPractical App in EE 03 - Lecture 02 - Proteus 01shafee001No ratings yet
- Week 5: Assignment SolutionsDocument3 pagesWeek 5: Assignment SolutionsRoshan RajuNo ratings yet
- ECE Microprocessors 8086Document16 pagesECE Microprocessors 8086Lokesh VeeramallaNo ratings yet
- Bannari Amman Institute of Technology Sathyamangalam - 638401 Department of Electronics and Communication Engineering Question Paper For Model ExamDocument3 pagesBannari Amman Institute of Technology Sathyamangalam - 638401 Department of Electronics and Communication Engineering Question Paper For Model ExamveerakumarsNo ratings yet
- Accessing Real Time Clock Registers and NMI Enable BitDocument22 pagesAccessing Real Time Clock Registers and NMI Enable Bitdrhollywood2001No ratings yet
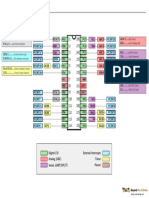
- ATmega328 Pin Diagram Cheat SheetDocument1 pageATmega328 Pin Diagram Cheat SheeterxetoNo ratings yet
- The PCI Local BusDocument56 pagesThe PCI Local Busatorresh090675No ratings yet
- Wallace Tree MultiplierDocument11 pagesWallace Tree MultiplierdinuarslanNo ratings yet
- Design and Implement n-Bit Adder/SubtractorDocument11 pagesDesign and Implement n-Bit Adder/SubtractorMuneeb ahmadNo ratings yet
- MD8828 MS7502 PDFDocument23 pagesMD8828 MS7502 PDFvenon25700100% (3)
- RAID Technology Explained in 40 CharactersDocument12 pagesRAID Technology Explained in 40 Charactershasnain qayyumNo ratings yet
- Pipeline Fundamentals and SpeedupDocument25 pagesPipeline Fundamentals and SpeedupAroosa SheikhNo ratings yet
- MICROCONTROLLER GUIDEDocument28 pagesMICROCONTROLLER GUIDERynefel ElopreNo ratings yet
- c6h Xoc Guide v03Document6 pagesc6h Xoc Guide v03astugiNo ratings yet
- Adapted From Class Notes of D. Patterson and W. DallyDocument45 pagesAdapted From Class Notes of D. Patterson and W. Dallyarlenebareno100% (1)