You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- English Vs Romanian SyntaxDocument7 pagesEnglish Vs Romanian SyntaxAna Maria Chirea-Stoica100% (1)
- Excel Tips Tricks e-BookV1.1 PDFDocument20 pagesExcel Tips Tricks e-BookV1.1 PDFSulabhNo ratings yet
- Deep Face Lab PDFDocument29 pagesDeep Face Lab PDFHenry MorenoNo ratings yet
- Features and ApplicationsDocument36 pagesFeatures and ApplicationsFWEFWEFWNo ratings yet
- 2021 03 23 11 17 Guarda Multiwallet BackupDocument5 pages2021 03 23 11 17 Guarda Multiwallet BackupEliot KhNo ratings yet
- Professional Ethics - Chapter 6Document17 pagesProfessional Ethics - Chapter 6Eliot KhNo ratings yet
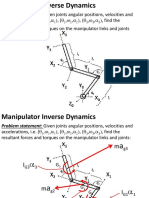
- Accelerations, I.E. (Q, W, A), (Q, W, A), (Q, W, A), Find The Resultant Forces and Torques On The Manipulator Links and JointsDocument18 pagesAccelerations, I.E. (Q, W, A), (Q, W, A), (Q, W, A), Find The Resultant Forces and Torques On The Manipulator Links and JointsEliot KhNo ratings yet
- Design Thinking: MGT 215 Lara Al ArabDocument23 pagesDesign Thinking: MGT 215 Lara Al ArabEliot KhNo ratings yet
- Accelerations, I.E. (Q, W, A), (Q, W, A), (Q, W, A), Find The Resultant Forces and Torques On The Manipulator Links and JointsDocument146 pagesAccelerations, I.E. (Q, W, A), (Q, W, A), (Q, W, A), Find The Resultant Forces and Torques On The Manipulator Links and JointsEliot KhNo ratings yet
- Politecnico Di Milano: Department of Energy School of Industrial and Information EngineeringDocument2 pagesPolitecnico Di Milano: Department of Energy School of Industrial and Information EngineeringEliot KhNo ratings yet
- Engineers in Organizations: GNE 305 - SPRING 2018Document15 pagesEngineers in Organizations: GNE 305 - SPRING 2018Eliot KhNo ratings yet
- Project Control: Project Management Course Prepared by Dr. Pierrette Zouein 1Document28 pagesProject Control: Project Management Course Prepared by Dr. Pierrette Zouein 1Eliot KhNo ratings yet
- Project Monitoring and Updating: Project Management Course Prepared by Dr. Pierrette Zouein 1Document72 pagesProject Monitoring and Updating: Project Management Course Prepared by Dr. Pierrette Zouein 1Eliot KhNo ratings yet
- Engineers and The Environment: Professional Ethics - Chapter 8 Spring 2018Document15 pagesEngineers and The Environment: Professional Ethics - Chapter 8 Spring 2018Eliot KhNo ratings yet
- Lecture 3 - Detailed Planning - NetworkGeneration v3. PWPDocument74 pagesLecture 3 - Detailed Planning - NetworkGeneration v3. PWPEliot KhNo ratings yet
- Titolo Presentazione Sottotitolo: Electronic Power Conversion: DctoacDocument55 pagesTitolo Presentazione Sottotitolo: Electronic Power Conversion: DctoacEliot KhNo ratings yet
- Detailed Planning: Work Breakdown Structure (WBS)Document26 pagesDetailed Planning: Work Breakdown Structure (WBS)Eliot KhNo ratings yet
- FGDFGFDGDocument57 pagesFGDFGFDGEliot KhNo ratings yet
- NMO Lecture 7 PDFDocument34 pagesNMO Lecture 7 PDFEliot KhNo ratings yet
- DFHGDHDocument120 pagesDFHGDHEliot KhNo ratings yet
- Project Monitoring and Updating: Project Management Course Prepared by Dr. Pierrette Zouein 1Document55 pagesProject Monitoring and Updating: Project Management Course Prepared by Dr. Pierrette Zouein 1Eliot KhNo ratings yet
- Numerical Methods For Optimization Lecture 6: Maximum Flow ProblemsDocument30 pagesNumerical Methods For Optimization Lecture 6: Maximum Flow ProblemsEliot KhNo ratings yet
- Numerical Methods For Optimization: 8. Linear ProgrammingDocument35 pagesNumerical Methods For Optimization: 8. Linear ProgrammingEliot KhNo ratings yet
- Titolo Presentazione Sottotitolo: Sizing of Photovoltaic SystemsDocument20 pagesTitolo Presentazione Sottotitolo: Sizing of Photovoltaic SystemsEliot KhNo ratings yet
- Titolo Presentazione Sottotitolo: Electronic Power Conversion: ActodcDocument72 pagesTitolo Presentazione Sottotitolo: Electronic Power Conversion: ActodcEliot KhNo ratings yet
- RehgaergDocument2 pagesRehgaergEliot KhNo ratings yet
- Titolo Presentazione Sottotitolo: Design of Photovoltaic SystemsDocument41 pagesTitolo Presentazione Sottotitolo: Design of Photovoltaic SystemsEliot KhNo ratings yet
- Titolo Presentazione Sottotitolo: Introduction To Photovoltaic GenerationDocument46 pagesTitolo Presentazione Sottotitolo: Introduction To Photovoltaic GenerationEliot KhNo ratings yet
- Circuit Theory: Titolo Presentazione SottotitoloDocument81 pagesCircuit Theory: Titolo Presentazione SottotitoloEliot KhNo ratings yet
- Titolo Presentazione Sottotitolo: Semiconductor DevicesDocument60 pagesTitolo Presentazione Sottotitolo: Semiconductor DevicesEliot KhNo ratings yet
- Additional Problems On Material Balances PDFDocument4 pagesAdditional Problems On Material Balances PDFEliot Kh0% (1)
- Energy BalancesDocument16 pagesEnergy BalancesEliot Kh100% (1)
- Material Balances On Reactive SystemsDocument10 pagesMaterial Balances On Reactive SystemsEliot KhNo ratings yet
- Circuit Theory: Titolo Presentazione SottotitoloDocument52 pagesCircuit Theory: Titolo Presentazione SottotitoloEliot KhNo ratings yet
- Sika Decap PDFDocument2 pagesSika Decap PDFthe pilotNo ratings yet
- Social Gaming Merchant AccountDocument2 pagesSocial Gaming Merchant AccountstarprocessingusNo ratings yet
- Implementation of Smart and Secure Gate Pass System Using QR CodeDocument7 pagesImplementation of Smart and Secure Gate Pass System Using QR CodeResearch ParkNo ratings yet
- Defense MechanismsDocument4 pagesDefense MechanismsTillu TilluNo ratings yet
- Mind Surge NewDocument65 pagesMind Surge NewmazzagraNo ratings yet
- Final Model Paper Computer Science HSSC-IIDocument9 pagesFinal Model Paper Computer Science HSSC-IIMUhammad Milad AwanNo ratings yet
- Aashto t87Document3 pagesAashto t87AL Bé NizNo ratings yet
- (Type The Documen T Title) : (Year)Document18 pages(Type The Documen T Title) : (Year)goodluck788No ratings yet
- Ten Steps To An Amazing INFJ LifeDocument15 pagesTen Steps To An Amazing INFJ LifeG. S.100% (5)
- Precast Concrete Structures For BuildingsDocument10 pagesPrecast Concrete Structures For BuildingsspqdragadosirelandNo ratings yet
- Tecnicas Monitoreo CorrosionDocument8 pagesTecnicas Monitoreo CorrosionJavier GonzalezNo ratings yet
- Op Amps and Linear Integrated Circuits 4th Edition by Gayakwad Ramakant A Textbook PDF Download PDFDocument1 pageOp Amps and Linear Integrated Circuits 4th Edition by Gayakwad Ramakant A Textbook PDF Download PDFNiraj KapoleNo ratings yet
- Stas 500-2-80 RDocument4 pagesStas 500-2-80 RSzabolcs KovacsNo ratings yet
- Arts NPSH TutorialDocument3 pagesArts NPSH TutorialDidier SanonNo ratings yet
- BONENT Candidate Handbook PDFDocument28 pagesBONENT Candidate Handbook PDFParshanwa Johnson100% (1)
- Refrigeration and Air ConditioningDocument41 pagesRefrigeration and Air Conditioningrejeesh_rajendranNo ratings yet
- Remembering Thanu Padmanabhan - The HinduDocument3 pagesRemembering Thanu Padmanabhan - The HinduIucaa libraryNo ratings yet
- Prompt by NikistDocument4 pagesPrompt by NikistMãnoj MaheshwariNo ratings yet
- Literature Review 1Document7 pagesLiterature Review 1api-609504422No ratings yet
- B1 UNIT 1 Life Skills Video Teacher's NotesDocument1 pageB1 UNIT 1 Life Skills Video Teacher's NotesXime OlariagaNo ratings yet
- Sharding:: Vertical Scaling Involves Increasing The Capacity of A Single Server, Such As Using A More Powerful CPUDocument233 pagesSharding:: Vertical Scaling Involves Increasing The Capacity of A Single Server, Such As Using A More Powerful CPUJigar SutariyaNo ratings yet
- Spectatorship Affect and Liveness in Contemporary British Performance PDFDocument358 pagesSpectatorship Affect and Liveness in Contemporary British Performance PDFShivansh Tuli100% (1)
- Ruskin As A Social Reformer - Docx ADocument2 pagesRuskin As A Social Reformer - Docx AAtif Hayat50% (2)
- 12auxiliary ViewsDocument22 pages12auxiliary Viewsmanishjangid9869No ratings yet
- Interweave Fiber Catalog Fall 2009Document56 pagesInterweave Fiber Catalog Fall 2009Interweave100% (1)
- LED Lighting Applications Design GuideDocument20 pagesLED Lighting Applications Design GuideBank100% (3)