You might also like
- Improving The Performance Response of Mobile Satellite Dish Antenna Network Within NigeriaDocument6 pagesImproving The Performance Response of Mobile Satellite Dish Antenna Network Within NigeriaEze ,Paulinus C.No ratings yet
- Super-Cell From Inner Sectors of Active Antenna System (AAS) - Vertical SectorizationDocument6 pagesSuper-Cell From Inner Sectors of Active Antenna System (AAS) - Vertical SectorizationMerlin Gilbert RajNo ratings yet
- Om Final Word SeminarDocument20 pagesOm Final Word Seminaryoursweetom282815No ratings yet
- Protection of TransmissionDocument18 pagesProtection of TransmissionAbhisekh AnandNo ratings yet
- Optimization Down Tilt Angle For Traffic Data at Handset Base StationDocument7 pagesOptimization Down Tilt Angle For Traffic Data at Handset Base StationNguyen DinhNo ratings yet
- Communication: Optical SatelliteDocument24 pagesCommunication: Optical Satellitesonu skNo ratings yet
- Development of Smart Online Partial Discharge MoniDocument8 pagesDevelopment of Smart Online Partial Discharge MoniJayasoruban RamakrishnanNo ratings yet
- Synchronism With Software-Based IEEE 1588-2008 For Smart GridDocument6 pagesSynchronism With Software-Based IEEE 1588-2008 For Smart GridLin KhantNo ratings yet
- SodaPDF-converted-Protection of Transmission 1Document21 pagesSodaPDF-converted-Protection of Transmission 1Narayana NarayanaNo ratings yet
- 3GPP NB-IoT Coverage Extension Using LEO SatellitesDocument5 pages3GPP NB-IoT Coverage Extension Using LEO SatelliteslucasolveigaNo ratings yet
- Researchpaper Performance Evaluation of Radio Propagation Models On GSM NetworkDocument7 pagesResearchpaper Performance Evaluation of Radio Propagation Models On GSM NetworkCarlos AlvarezNo ratings yet
- An Automated Energy Meter Reading System Using GSM TechnologyDocument8 pagesAn Automated Energy Meter Reading System Using GSM TechnologyBarNo ratings yet
- A Synopsis ONDocument11 pagesA Synopsis ONRAJAT NEGINo ratings yet
- Jsaer2014 01 02 01 11Document11 pagesJsaer2014 01 02 01 11jsaereditorNo ratings yet
- Cellular Project in GBUDocument33 pagesCellular Project in GBUravindrangr98No ratings yet
- JournalNX - Bridge Disaster MonitoringDocument3 pagesJournalNX - Bridge Disaster MonitoringJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- S.MANJU (09E58) J.JANANI (09E32) : Submitted byDocument8 pagesS.MANJU (09E58) J.JANANI (09E32) : Submitted bysssampleNo ratings yet
- PV IotDocument9 pagesPV IotYOUNESS ATIFINo ratings yet
- 4..GIS 2 Satellite Stereo Image Analysis For Power Transmission Lines (PT&D-IC-TL)Document8 pages4..GIS 2 Satellite Stereo Image Analysis For Power Transmission Lines (PT&D-IC-TL)Narasimha DvlNo ratings yet
- Antenna Azimuth Position Control System Using PIDDocument12 pagesAntenna Azimuth Position Control System Using PIDAyumuNo ratings yet
- Radha Govind Group of Institutions, Meerut: The Protection of Transmission Line Using Global Positioning SystemDocument28 pagesRadha Govind Group of Institutions, Meerut: The Protection of Transmission Line Using Global Positioning SystemSaxena AbhishekNo ratings yet
- Jurnal IEEE KomberDocument6 pagesJurnal IEEE KomberFadhli KabirNo ratings yet
- Analysis of A Navigation Antenna Installed On A Civil AirplaneDocument4 pagesAnalysis of A Navigation Antenna Installed On A Civil Airplanefakher hamoucheNo ratings yet
- Protection of Transmission Line Using GPSDocument11 pagesProtection of Transmission Line Using GPSRohit GandhiNo ratings yet
- Reusable Delay Path Synthesis For LighteningDocument14 pagesReusable Delay Path Synthesis For LighteningTRIAD TECHNO SERVICESNo ratings yet
- Analysis of Wireless System Design For Aircraft Indoor Wireless Sensor CommunicationDocument5 pagesAnalysis of Wireless System Design For Aircraft Indoor Wireless Sensor CommunicationAshwani SinghNo ratings yet
- Optimization Down Tilt Angle For Traffic Data at Handset Base StationDocument7 pagesOptimization Down Tilt Angle For Traffic Data at Handset Base StationAlberta DaviesNo ratings yet
- (Paper) RF Immunity Testing of An Unmanned Aerial Vehicle Platform Under Strong EM Field Conditions PDFDocument5 pages(Paper) RF Immunity Testing of An Unmanned Aerial Vehicle Platform Under Strong EM Field Conditions PDFTudosa IoanNo ratings yet
- MFauzanEP-Sholeh Mauludi Taufik IC3E2015 UTHM ARPNDocument8 pagesMFauzanEP-Sholeh Mauludi Taufik IC3E2015 UTHM ARPNAnonymous BW2VsFifi9No ratings yet
- A Practical Path Loss Model For Indoor WiFi Positioning Enhancement-2007Document5 pagesA Practical Path Loss Model For Indoor WiFi Positioning Enhancement-2007Manuel Lapeyre CorzoNo ratings yet
- 6815 DistanceProtection EOS BK 20210608 WebDocument21 pages6815 DistanceProtection EOS BK 20210608 WebPaulo Estevan CarvalhoNo ratings yet
- A Metaheuristic Approach For Propagation-Model Tuning in LTE NetworksDocument10 pagesA Metaheuristic Approach For Propagation-Model Tuning in LTE NetworksSuranga SampathNo ratings yet
- A Coil Detection System For Dynamic Wireless Charging of Electric Vehicle PDFDocument16 pagesA Coil Detection System For Dynamic Wireless Charging of Electric Vehicle PDFPaul Mathew 21PHD1086No ratings yet
- 2.45 GHZ Wi-Fi Band Operated Circularly Polarized Rectenna For RF Energy Harvesting in Smart City ApplicationsDocument18 pages2.45 GHZ Wi-Fi Band Operated Circularly Polarized Rectenna For RF Energy Harvesting in Smart City Applicationsservice infoNo ratings yet
- 2016 TVT RetDocument13 pages2016 TVT RetTrần Hoàng DiệuNo ratings yet
- AntenaDocument5 pagesAntenaBilisuma DamiteNo ratings yet
- 3D Mesh Networking For IoTDocument11 pages3D Mesh Networking For IoTДжондо АнанимидзеNo ratings yet
- Polarization Reconfigurable Air-Filled Substrate IDocument16 pagesPolarization Reconfigurable Air-Filled Substrate IpikothemanNo ratings yet
- Smart Metering For Low Voltage Using Arduino Due PDFDocument6 pagesSmart Metering For Low Voltage Using Arduino Due PDFUmeshNo ratings yet
- Automatic Distance Relay PDFDocument4 pagesAutomatic Distance Relay PDFOmar Chayña VelásquezNo ratings yet
- International Journal of Engineering and Science Invention (IJESI)Document9 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsNo ratings yet
- 1 - First Preparing - Paper 1Document9 pages1 - First Preparing - Paper 1asem elfekyNo ratings yet
- An Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing IDocument10 pagesAn Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing InugrohoNo ratings yet
- CQI Prediction For Shadow Fading in LTE-compatible GEO Mobile Satellite Communications SystemDocument4 pagesCQI Prediction For Shadow Fading in LTE-compatible GEO Mobile Satellite Communications SystemHamza BouchebbahNo ratings yet
- Reconfigurable Intelligent Surfaces ForDocument14 pagesReconfigurable Intelligent Surfaces ForVarsha SinghNo ratings yet
- Design of Fire Siren System Based On Power Line CarrierDocument15 pagesDesign of Fire Siren System Based On Power Line CarrierKIU PUBLICATION AND EXTENSIONNo ratings yet
- Archiman Energy Journal PublicationDocument39 pagesArchiman Energy Journal PublicationArchiman LahiryNo ratings yet
- Performance Analysis of Power Budget Management For Satellite Design Under Ka Band Frequency BandDocument6 pagesPerformance Analysis of Power Budget Management For Satellite Design Under Ka Band Frequency BandIJRASETPublicationsNo ratings yet
- aUTOMATIC METERINGDocument12 pagesaUTOMATIC METERINGGSK MuhammadNo ratings yet
- Mallesh AntennaDocument26 pagesMallesh AntennaJainuddin ShNo ratings yet
- Sensors: Reconfigurable Antenna Array Direction Finding System Based On A Fast Search AlgorithmDocument14 pagesSensors: Reconfigurable Antenna Array Direction Finding System Based On A Fast Search AlgorithmSYED IMRAN HUSSAINNo ratings yet
- Transmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded LogicDocument5 pagesTransmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded LogicIJRASETPublicationsNo ratings yet
- 12A3GDocument13 pages12A3GMUHAMMAD SHAHID ATTARINo ratings yet
- Wireless Oscilloscope Using ZigbeeDocument4 pagesWireless Oscilloscope Using ZigbeemichaelNo ratings yet
- Distance Protection of AC Grid With HVDC-Connected Offshore Wind GeneratorsDocument9 pagesDistance Protection of AC Grid With HVDC-Connected Offshore Wind GeneratorsfukcNo ratings yet
- Radio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabDocument4 pagesRadio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabFahmy R. SaputriNo ratings yet
- 98 e Aci 136Document7 pages98 e Aci 136Mohamad AlimadadiNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericFrom EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericNo ratings yet
- Er Shutdown For 15.12.21 Rev1Document8 pagesEr Shutdown For 15.12.21 Rev1Gitesh PatelNo ratings yet
- Electrical Findings 6Document13 pagesElectrical Findings 6Lester Musca100% (1)
- The Main Technology For The Reduction of Logistic CostsDocument3 pagesThe Main Technology For The Reduction of Logistic CostsFamilia Peña GuerreroNo ratings yet
- STOTZ MRA BrouchureDocument2 pagesSTOTZ MRA BrouchureTiago Rodrigo PradoNo ratings yet
- General Concepts and Historical Antecedents of Science and TechnologyDocument20 pagesGeneral Concepts and Historical Antecedents of Science and TechnologyZarina PajarillagaNo ratings yet
- Release NotesDocument7 pagesRelease NotesZhen Yang ChuaNo ratings yet
- Rail and Safety ConceptDocument4 pagesRail and Safety ConceptJoseNo ratings yet
- APPLMC001 - ATX Catalog EnglishDocument519 pagesAPPLMC001 - ATX Catalog EnglishJuanje Tres CantosNo ratings yet
- Communication Systems by S Haykin PDFDocument2 pagesCommunication Systems by S Haykin PDFAmandaNo ratings yet
- Element - 111 - 579-Bill of Quantity For Constructing Main House of MosqueDocument8 pagesElement - 111 - 579-Bill of Quantity For Constructing Main House of MosqueKapros Junior AphrodiceNo ratings yet
- Wordlist Unit 1 GOLD EXPERIENCE B1 PDFDocument112 pagesWordlist Unit 1 GOLD EXPERIENCE B1 PDFmelisa collinsNo ratings yet
- Commercializing Process TechnologiesDocument11 pagesCommercializing Process TechnologiesBramJanssen76No ratings yet
- UDF & Powercopy of CATIA V5: About COE Membership Industries Events Content Center Partners ForumsDocument14 pagesUDF & Powercopy of CATIA V5: About COE Membership Industries Events Content Center Partners ForumsRedondela DentalNo ratings yet
- Internship Report at A Telecommunication Company / SyriaDocument5 pagesInternship Report at A Telecommunication Company / Syriawaelmahainy10% (1)
- NXC100 ControllerDocument2 pagesNXC100 ControllermartinimartiiniNo ratings yet
- Nuvoton ISD9xxx ICP Programmer User Guide V1.17.5182Document46 pagesNuvoton ISD9xxx ICP Programmer User Guide V1.17.5182PitarsaNo ratings yet
- Ez Efi PDFDocument2 pagesEz Efi PDFNathanNo ratings yet
- Embedded C Interview Questions and Answers On Embedded Systems - Page 2Document9 pagesEmbedded C Interview Questions and Answers On Embedded Systems - Page 2aamyaNo ratings yet
- Al115c Mio Sporty CarburetorDocument2 pagesAl115c Mio Sporty CarburetorDidi IswantoNo ratings yet
- Allianz Chooses IBM Data CenterDocument2 pagesAllianz Chooses IBM Data CenterMihai StroiaNo ratings yet
- Datasheet ArcMate 120ic 12LDocument1 pageDatasheet ArcMate 120ic 12LmuertesalvajeNo ratings yet
- Dr. Nehal Allam: How Technology Trend Change The Nature of HRM Student Name: Mahmoud Mohamed Mahmoud AhmedDocument4 pagesDr. Nehal Allam: How Technology Trend Change The Nature of HRM Student Name: Mahmoud Mohamed Mahmoud AhmedMahmoud MohamedNo ratings yet
- Taniya Rawat: ObjectiveDocument1 pageTaniya Rawat: Objectiveanuj sharmaNo ratings yet
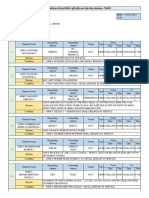
- Fawde 20 KvaDocument4 pagesFawde 20 KvatritiluNo ratings yet
- Principles of Data VisualizationDocument2 pagesPrinciples of Data VisualizationAAKASHNo ratings yet
- Agung Laksamana - PERHUMASDocument46 pagesAgung Laksamana - PERHUMASDaeng Mudrikan NacongNo ratings yet
- Project Report On Gym Management SystemDocument57 pagesProject Report On Gym Management SystemGovind Singh Parihar60% (5)
- 12 CS - SQPDocument5 pages12 CS - SQPkumaran mudNo ratings yet
- Unit IiiDocument40 pagesUnit IiiVENU VNo ratings yet