You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Lecture 14 - Horizontal AlignmentDocument13 pagesLecture 14 - Horizontal AlignmentSesay AlieuNo ratings yet
- Lecture 13 - Vertical AlignmentDocument20 pagesLecture 13 - Vertical AlignmentSesay AlieuNo ratings yet
- Paper 34 PDFDocument14 pagesPaper 34 PDFSesay AlieuNo ratings yet
- Geometric Design Using AutoCAD Civil 3DDocument7 pagesGeometric Design Using AutoCAD Civil 3DBryan ManaluNo ratings yet
- Irjet V5i7203 PDFDocument5 pagesIrjet V5i7203 PDFEng mohammadNo ratings yet
- 3D Model For Highway Alignment: Ananya Augustine, Sahimol EldhoseDocument5 pages3D Model For Highway Alignment: Ananya Augustine, Sahimol EldhoseSesay AlieuNo ratings yet
- Design of Foundations To EurocodesDocument17 pagesDesign of Foundations To EurocodesSesay AlieuNo ratings yet
- Flat Slab Design AssignDocument12 pagesFlat Slab Design AssignSesay AlieuNo ratings yet
- Course Outline: Urban Transportation Planning (Year 5, Second Semester) Lecturer: Dr. Albert FordeDocument2 pagesCourse Outline: Urban Transportation Planning (Year 5, Second Semester) Lecturer: Dr. Albert FordeSesay AlieuNo ratings yet
- Urban Transportation Planning: Topic:IntroductionDocument14 pagesUrban Transportation Planning: Topic:IntroductionSesay AlieuNo ratings yet
- Assignment 3 Mode Choice ModelsDocument4 pagesAssignment 3 Mode Choice ModelsSesay Alieu100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cable 3/4 Sleeve Sweater: by Lisa RichardsonDocument3 pagesCable 3/4 Sleeve Sweater: by Lisa RichardsonAlejandra Martínez MartínezNo ratings yet
- Labor LawDocument6 pagesLabor LawElden Cunanan BonillaNo ratings yet
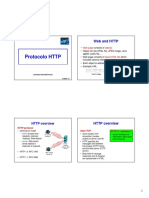
- HTTP ProtocolDocument16 pagesHTTP ProtocolHao NguyenNo ratings yet
- Geography Cba PowerpointDocument10 pagesGeography Cba Powerpointapi-489088076No ratings yet
- List of TCP and UDP Port NumbersDocument44 pagesList of TCP and UDP Port NumbersElvis JavierNo ratings yet
- The Development of Silicone Breast Implants That Are Safe FoDocument5 pagesThe Development of Silicone Breast Implants That Are Safe FomichelleflresmartinezNo ratings yet
- ET275 Unit 2 - Lesson Plan - SlidesDocument27 pagesET275 Unit 2 - Lesson Plan - SlidesDonald LeedyNo ratings yet
- 1ST Term S1 Physics-1Document33 pages1ST Term S1 Physics-1onos arereNo ratings yet
- CASA 212 - 200 (NS) : NO Description P.N QTY ConditionDocument6 pagesCASA 212 - 200 (NS) : NO Description P.N QTY ConditionsssavNo ratings yet
- MBFI Quiz KeyDocument7 pagesMBFI Quiz Keypunitha_pNo ratings yet
- PPR 8001Document1 pagePPR 8001quangga10091986No ratings yet
- Tutorial MEP1553 - Insulation DiagnosticsDocument4 pagesTutorial MEP1553 - Insulation DiagnosticsSharin Bin Ab GhaniNo ratings yet
- Tire Size ComparisonDocument1 pageTire Size ComparisonBudi DarmawanNo ratings yet
- PosdmDocument29 pagesPosdmChandraBhushan67% (3)
- SMB Marketing PlaybookDocument18 pagesSMB Marketing PlaybookpramodharithNo ratings yet
- Business Opportunity Identification and SelectionDocument15 pagesBusiness Opportunity Identification and SelectionAnonymous 3H6fFBmNo ratings yet
- Status Of: Philippine ForestsDocument11 pagesStatus Of: Philippine ForestsAivy Rose VillarbaNo ratings yet
- CIMICDocument228 pagesCIMICKehinde Olaoluwa100% (1)
- Surveillance of Healthcare-Associated Infections in Indonesian HospitalsDocument12 pagesSurveillance of Healthcare-Associated Infections in Indonesian HospitalsRidha MardiyaniNo ratings yet
- 48 - 1997 SummerDocument42 pages48 - 1997 SummerLinda ZwaneNo ratings yet
- Serra Do Mel 3 A 6 - Project - VC1-ReportDocument13 pagesSerra Do Mel 3 A 6 - Project - VC1-Reportjosimar gomes da silva filhoNo ratings yet
- BNBC 2017 Volume 1 DraftDocument378 pagesBNBC 2017 Volume 1 Draftsiddharth gautamNo ratings yet
- Muji Into Denmark MarketDocument13 pagesMuji Into Denmark MarketTròn QuayyNo ratings yet
- 5GMF WP101 11 5G Rat PDFDocument26 pages5GMF WP101 11 5G Rat PDFAvik ModakNo ratings yet
- Calculate PostageDocument4 pagesCalculate PostageShivam ThakurNo ratings yet
- Validation TP APPO R12Document3 pagesValidation TP APPO R12Suman GopanolaNo ratings yet
- DM2 0n-1abDocument6 pagesDM2 0n-1abyus11No ratings yet
- Australian Car Mechanic - June 2016Document76 pagesAustralian Car Mechanic - June 2016Mohammad Faraz AkhterNo ratings yet
- Marine Products: SL-3 Engine ControlsDocument16 pagesMarine Products: SL-3 Engine ControlsPedro GuerraNo ratings yet
- How To Start A Fish Ball Vending Business - Pinoy Bisnes IdeasDocument10 pagesHow To Start A Fish Ball Vending Business - Pinoy Bisnes IdeasNowellyn IncisoNo ratings yet