You might also like
- API q2 Eval Score - Check ListDocument46 pagesAPI q2 Eval Score - Check ListPascal Konstant33% (3)
- LEO Based Satellite Navigation and Anti-Theft Tracking System For AutomobilesDocument9 pagesLEO Based Satellite Navigation and Anti-Theft Tracking System For AutomobilesIJRASETPublicationsNo ratings yet
- Satellite Television: Analogue and Digital Reception TechniquesFrom EverandSatellite Television: Analogue and Digital Reception TechniquesRating: 2.5 out of 5 stars2.5/5 (3)
- Warhammer Aos Tomb Kings en PDFDocument22 pagesWarhammer Aos Tomb Kings en PDFHank Metzger100% (1)
- Principles of Differential GPS, Surveying Methods and Integration With GISDocument26 pagesPrinciples of Differential GPS, Surveying Methods and Integration With GISSaurabh Suman100% (1)
- Real-Time Kinematic and Differential GPS: PrintDocument13 pagesReal-Time Kinematic and Differential GPS: PrintBijay Krishna Das100% (1)
- 01 Total-Station GPS-1 PDFDocument113 pages01 Total-Station GPS-1 PDFAdam senoNo ratings yet
- Assignment Report: Advanced Engineering SurveyDocument12 pagesAssignment Report: Advanced Engineering SurveySharjeel GillNo ratings yet
- DJI Flight Simulator: User ManualDocument20 pagesDJI Flight Simulator: User ManualfalagamaNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- 00-Python Essentials 1 (Aligned With PCEP-30-02)Document11 pages00-Python Essentials 1 (Aligned With PCEP-30-02)josegmay100% (1)
- Teaching and Learning Advances On Sensors For IoTDocument124 pagesTeaching and Learning Advances On Sensors For IoTantonioheredia100% (1)
- Amdl Intro To GPSDocument29 pagesAmdl Intro To GPSgaurang1111No ratings yet
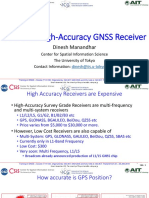
- Low-Cost High-Accuracy GNSS Receiver: Dinesh ManandharDocument14 pagesLow-Cost High-Accuracy GNSS Receiver: Dinesh ManandharAlex MateoNo ratings yet
- Static and Dynamic Performance Evaluation of Low-Cost RTK GPS ReceiversDocument4 pagesStatic and Dynamic Performance Evaluation of Low-Cost RTK GPS ReceiversGuilhermeNo ratings yet
- Barnes Etal2003aDocument14 pagesBarnes Etal2003aengineer86No ratings yet
- Fundamental Remote SensingDocument55 pagesFundamental Remote Sensingد. سامي أبو جهادNo ratings yet
- GNSS Compare: Performance Assessment of Real-Time PVT Algorithms Using Raw GNSS Measurements On An Android SmartphoneDocument8 pagesGNSS Compare: Performance Assessment of Real-Time PVT Algorithms Using Raw GNSS Measurements On An Android SmartphoneCiuban SebastianNo ratings yet
- My RTK NetDocument25 pagesMy RTK Nethazaldin taib50% (4)
- Dgps Survey For BWDBDocument34 pagesDgps Survey For BWDBShafiqul HasanNo ratings yet
- GPS Flashcards - QuizletDocument7 pagesGPS Flashcards - QuizletTJ CabatinganNo ratings yet
- Gps Activities at SlacDocument11 pagesGps Activities at Slacjose antonio carazoNo ratings yet
- DGPS, Rtk-Gps and Starfire Dgps Performance Under Tree Shading EnvironmentsDocument7 pagesDGPS, Rtk-Gps and Starfire Dgps Performance Under Tree Shading EnvironmentsKray TharaNo ratings yet
- Mountaintop GNSS-R and GNSS-RO - New ResultsDocument7 pagesMountaintop GNSS-R and GNSS-RO - New ResultsneetisonthNo ratings yet
- s16 Pornchai Supnithi PDFDocument34 pagess16 Pornchai Supnithi PDFThanate JongrujinanNo ratings yet
- ISSET Symposium INSPIRE Presentation 2019Document25 pagesISSET Symposium INSPIRE Presentation 2019kirtan dhunnooNo ratings yet
- Topographic Survey PlanDocument5 pagesTopographic Survey PlanFajar Adi RamdhaniNo ratings yet
- 142 PDFDocument7 pages142 PDFbalajigm2340No ratings yet
- Real-Time GNSS Precise Positioning: Rtklib For Ros: Ant Onio Ferreira, Bruno Matias, Jos e Almeida and Eduardo SilvaDocument8 pagesReal-Time GNSS Precise Positioning: Rtklib For Ros: Ant Onio Ferreira, Bruno Matias, Jos e Almeida and Eduardo SilvaMohamed AtieaNo ratings yet
- High Accuracy GPS and Antijam Protection Using A P (Y) Code Digital Beamsteering ReceiverDocument10 pagesHigh Accuracy GPS and Antijam Protection Using A P (Y) Code Digital Beamsteering ReceiverGyana SahooNo ratings yet
- A Data Quality Assessment Approach For High-PrecisDocument22 pagesA Data Quality Assessment Approach For High-Preciskyambadde hudsonNo ratings yet
- Satellite Navigation (GPS)Document28 pagesSatellite Navigation (GPS)NAJA MOHAMEDNo ratings yet
- PRODUCTS Final 1Document133 pagesPRODUCTS Final 1Soigne ConsultantsNo ratings yet
- Cadastral PPT (Unit 5)Document97 pagesCadastral PPT (Unit 5)Abdifetah SheikmohamedNo ratings yet
- 06 BaseStation Introduction PDFDocument10 pages06 BaseStation Introduction PDFThanate JongrujinanNo ratings yet
- Gps Signal Acquisition and Tracking Using Software Gps ReceiverDocument4 pagesGps Signal Acquisition and Tracking Using Software Gps Receivertahir.saleemNo ratings yet
- A Sequential Least Squares Solution For Integer Ambiguity Resolution in Real-Time Kinematic PositioningDocument9 pagesA Sequential Least Squares Solution For Integer Ambiguity Resolution in Real-Time Kinematic PositioningJakub NosekNo ratings yet
- ROVER Instruments Catalogue PDFDocument40 pagesROVER Instruments Catalogue PDFKabelventjeNo ratings yet
- Leica Jps Ground-Based Positioning System Using Locata Technology Release 1.1 - FINALDocument14 pagesLeica Jps Ground-Based Positioning System Using Locata Technology Release 1.1 - FINALwarlockallNo ratings yet
- 17 - An Introduction To RTKLIBDocument30 pages17 - An Introduction To RTKLIBAlessandro PereiraNo ratings yet
- FlamingoDocument54 pagesFlamingohNo ratings yet
- 30thists 6thnast SidiAhmedGNSS PDFDocument7 pages30thists 6thnast SidiAhmedGNSS PDFdahmaneNo ratings yet
- 30thists 6thnast SidiAhmedGNSS PDFDocument7 pages30thists 6thnast SidiAhmedGNSS PDFdahmaneNo ratings yet
- Radio Frequency Environment For Earth-Observing Passive Microwave ImagersDocument10 pagesRadio Frequency Environment For Earth-Observing Passive Microwave ImagersRaúl Díez GarcíaNo ratings yet
- How To Meet The Demanding Challenges Involved in Testing GNSS Receivers?Document10 pagesHow To Meet The Demanding Challenges Involved in Testing GNSS Receivers?Arindam ChakrabortyNo ratings yet
- SurveyDocument5 pagesSurveyMohammad KordNo ratings yet
- 10 23919@ursircrs49211 2020 9113621Document4 pages10 23919@ursircrs49211 2020 9113621Prity MishraNo ratings yet
- Technology Transfer August 2022Document214 pagesTechnology Transfer August 2022Dr.Chodimella Venkata KrishnaNo ratings yet
- DGPS 28oct, 2010 EdusatDocument28 pagesDGPS 28oct, 2010 EdusatsgrrscNo ratings yet
- DIS 11-12 W04 Lecture PDFDocument67 pagesDIS 11-12 W04 Lecture PDFEvangelista Mao0% (1)
- IOT Mid ProjectDocument4 pagesIOT Mid Projectsai krishnaNo ratings yet
- Surveying With GPSDocument6 pagesSurveying With GPSkevincoperNo ratings yet
- Introduction To Satrec InitiativeDocument36 pagesIntroduction To Satrec Initiativeebrahimbatul2No ratings yet
- Implementing Real Time Signal MonitoringDocument9 pagesImplementing Real Time Signal MonitoringAubin TsapongNo ratings yet
- Software Defined Gnss Receiver: SciencedirectDocument6 pagesSoftware Defined Gnss Receiver: SciencedirectTommy AsselinNo ratings yet
- MUSSE: A Designed Multi-Ultrasonic-Sensor System For Echolocation On Multiple RobotsDocument5 pagesMUSSE: A Designed Multi-Ultrasonic-Sensor System For Echolocation On Multiple RobotsX ManNo ratings yet
- Lesson 8Document6 pagesLesson 8t8ktwrcvj4No ratings yet
- Unit 1.B. Space Based Positioning System: By. Piyush BhandariDocument17 pagesUnit 1.B. Space Based Positioning System: By. Piyush BhandariP K JainNo ratings yet
- Data Sheet: Leica GS18 IDocument2 pagesData Sheet: Leica GS18 IFaizal Ibnu AdrianNo ratings yet
- Localization White Paper 052617Document15 pagesLocalization White Paper 052617Umesh GuptaNo ratings yet
- International - Global - Navigation - Satellit INTERESANTE Historia Del PPPDocument15 pagesInternational - Global - Navigation - Satellit INTERESANTE Historia Del PPPFrancisco Javier GalindoNo ratings yet
- Mobile Robots With Leica GPS1200 TRUDocument2 pagesMobile Robots With Leica GPS1200 TRUyamilNo ratings yet
- The Use of Low Cost Single Frequency GNSS Receivers in Mapping SurveysDocument12 pagesThe Use of Low Cost Single Frequency GNSS Receivers in Mapping SurveysMuhammad Nashan FauzianNo ratings yet
- GPS: Enhanced Capabilities - Assured Service: Ray Clore, Harold MartinDocument18 pagesGPS: Enhanced Capabilities - Assured Service: Ray Clore, Harold MartinSilvia Graciela HerrmannNo ratings yet
- Detecting Drones and Human Beings With DVB-S Based COTS Passive Radar For Short-Range SurveillanceDocument6 pagesDetecting Drones and Human Beings With DVB-S Based COTS Passive Radar For Short-Range Surveillancedhyan shahNo ratings yet
- Effects of Dosage and Spraying Volume On CottonDocument15 pagesEffects of Dosage and Spraying Volume On CottonDarastorNo ratings yet
- Cannabis Vaporizer Combines Efficient Delivery ofDocument22 pagesCannabis Vaporizer Combines Efficient Delivery ofDarastorNo ratings yet
- Cotton Growth ModelingDocument18 pagesCotton Growth ModelingDarastorNo ratings yet
- A Review On The Use of Unmanned Aerial Vehicles and Imaging Sensors For Monitoring and Assessing Plant StressesDocument27 pagesA Review On The Use of Unmanned Aerial Vehicles and Imaging Sensors For Monitoring and Assessing Plant StressesDarastorNo ratings yet
- Phytoremediation of Textile DyesDocument18 pagesPhytoremediation of Textile DyesDarastorNo ratings yet
- A Ground Control For UAV MappingDocument31 pagesA Ground Control For UAV MappingDarastorNo ratings yet
- Metashape-Pro 1 5 enDocument145 pagesMetashape-Pro 1 5 enRoberto ENo ratings yet
- An Introduction To Simio For BeginnersDocument4 pagesAn Introduction To Simio For BeginnersMarco HANo ratings yet
- 1.1 Solution PDFDocument165 pages1.1 Solution PDFcoolboyasifNo ratings yet
- Course Code Course Name Teaching Scheme (Contact Hours) Credits Assigned Theory Pract. Tut. Theory Tut. Pract. TotalDocument3 pagesCourse Code Course Name Teaching Scheme (Contact Hours) Credits Assigned Theory Pract. Tut. Theory Tut. Pract. TotalanniisaniketNo ratings yet
- Online CSE Book Store Management System Visvesvaraya Technology UniversityDocument35 pagesOnline CSE Book Store Management System Visvesvaraya Technology UniversityPranita ShahiNo ratings yet
- DSP Group ProjectDocument2 pagesDSP Group ProjectMuhammad LuqmanNo ratings yet
- New ReportDocument2 pagesNew ReportJuan PortilloNo ratings yet
- Wrm-40 User ManualDocument62 pagesWrm-40 User Manualsyamsudin4077No ratings yet
- Powercore Mpc-20: DimensionsDocument2 pagesPowercore Mpc-20: DimensionsspiNo ratings yet
- Exploring wV1 Grader CAPDocument8 pagesExploring wV1 Grader CAPsargeywargeyNo ratings yet
- AirPrime - GSMA Device Connection Efficiency Requirements - Rev1.0Document4 pagesAirPrime - GSMA Device Connection Efficiency Requirements - Rev1.0Meenakshi Sundaram KaruppiahNo ratings yet
- Long Intl Considerations For Identifying and Analyzing The Critical PathDocument18 pagesLong Intl Considerations For Identifying and Analyzing The Critical PathABDEL RAHMAN BADRANNo ratings yet
- HFC302 ManualDocument634 pagesHFC302 ManualDona RosadoNo ratings yet
- Bit400 en Col34 FV Part A4Document2 pagesBit400 en Col34 FV Part A4Srikanth Ane NennuNo ratings yet
- LogDocument241 pagesLogtatiane guimaraesNo ratings yet
- Manual of HOD User Login Creation - 552960Document16 pagesManual of HOD User Login Creation - 552960Hiren H. PatelNo ratings yet
- Class 12 Ip All KV Region Papers 2022-23Document155 pagesClass 12 Ip All KV Region Papers 2022-23dig vijayNo ratings yet
- MultisimDocument9 pagesMultisim09es80No ratings yet
- CSE5382 SyllabusDocument5 pagesCSE5382 SyllabushemNo ratings yet
- Simulated AnnealingDocument54 pagesSimulated AnnealingAditiLavigneNo ratings yet
- Product Key Autodesk 2015Document3 pagesProduct Key Autodesk 2015Darío Luis GómezNo ratings yet
- AXIS Camera Setup and TroublshootingDocument4 pagesAXIS Camera Setup and TroublshootingShadab QureshiNo ratings yet
- MANUAL HP MFP M426c - 04683515 PDFDocument190 pagesMANUAL HP MFP M426c - 04683515 PDFDavid AgueroNo ratings yet
- BSC CommandsDocument25 pagesBSC CommandsTC Erkan DereliNo ratings yet
- HiveDocument65 pagesHiveApurvaNo ratings yet
- Tu Delft Aircraft Performance Syllabus Dec 2016Document9 pagesTu Delft Aircraft Performance Syllabus Dec 2016chhetribharat08No ratings yet
- ANSYS TCL TK Legacy Training 2013-02-01Document61 pagesANSYS TCL TK Legacy Training 2013-02-01Sharan AnnapuraNo ratings yet
- Calculating and Displaying Regression Statistics in ExcelDocument4 pagesCalculating and Displaying Regression Statistics in Exceldickson phiriNo ratings yet