You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Paving and Surfacing OperationsDocument403 pagesPaving and Surfacing OperationsGeeta RamsinghNo ratings yet
- Designe and Implementation of Weather Forecasting System in Air Line CompanyDocument53 pagesDesigne and Implementation of Weather Forecasting System in Air Line CompanypromiseNo ratings yet
- Nine Thousand Miles of ConcreteDocument58 pagesNine Thousand Miles of ConcreteGerry Marley100% (4)
- GATE 2025 Test Series Schedule - Meta-GATEDocument5 pagesGATE 2025 Test Series Schedule - Meta-GATERahul SamalaNo ratings yet
- SL0058 Minthly Report MayDocument1 pageSL0058 Minthly Report MayRahul SamalaNo ratings yet
- Advt No.08-2024-JRFDocument2 pagesAdvt No.08-2024-JRFRahul SamalaNo ratings yet
- Sai MayDocument3 pagesSai MayRahul SamalaNo ratings yet
- Page: 1 of 1: M/S.Rolon SealsDocument1 pagePage: 1 of 1: M/S.Rolon SealsRahul SamalaNo ratings yet
- Astm E2099 - 1 (En) PDFDocument4 pagesAstm E2099 - 1 (En) PDFRahul SamalaNo ratings yet
- DCA LetterDocument1 pageDCA LetterRahul SamalaNo ratings yet
- 021.SANRAY-AGSX300KN-AMC and SINGLE Visit OFFER2020-21Document6 pages021.SANRAY-AGSX300KN-AMC and SINGLE Visit OFFER2020-21Rahul SamalaNo ratings yet
- Inter CertificateDocument1 pageInter CertificateRahul SamalaNo ratings yet
- Astm D5713 - 1 (En) PDFDocument4 pagesAstm D5713 - 1 (En) PDFRahul SamalaNo ratings yet
- Astm E2097 - 1 (En)Document5 pagesAstm E2097 - 1 (En)Rahul SamalaNo ratings yet
- Aerodrome Emergency Planning PDFDocument8 pagesAerodrome Emergency Planning PDFAnousack KittilathNo ratings yet
- Aerodrome Manual 2019Document329 pagesAerodrome Manual 2019wahyu100% (3)
- Fcom Atr72-500 Rev40.0 Oct22Document2,192 pagesFcom Atr72-500 Rev40.0 Oct22Rija RamarokotoNo ratings yet
- 5778 PDFDocument49 pages5778 PDFMomal BaigNo ratings yet
- 9854 Global Air Traffic Management Operational ConceptDocument82 pages9854 Global Air Traffic Management Operational Conceptchemoxiaoxia1100% (1)
- Design Elements of Airport TaxiwayDocument28 pagesDesign Elements of Airport TaxiwayJagadeeshNo ratings yet
- OTG Guidance Safety - Operations (v1)Document27 pagesOTG Guidance Safety - Operations (v1)luis fernandoNo ratings yet
- CAP 1054 Aeronautical Information Management July 2015 PDFDocument96 pagesCAP 1054 Aeronautical Information Management July 2015 PDFAdam Tudor-danielNo ratings yet
- Suas 2023 RulesDocument33 pagesSuas 2023 RulesDylan KwongNo ratings yet
- Venezuela Cycle 2111Document145 pagesVenezuela Cycle 2111Jose Francisco Colina100% (2)
- Ifr PRCTDocument7 pagesIfr PRCTErmias ErmaniNo ratings yet
- VFR Cross-Country Tutorial For Flightgear V2016.4 "Zurich": Wangen-Lachen (LSPV) To St. Gallen-Altenrhein (LSZR)Document11 pagesVFR Cross-Country Tutorial For Flightgear V2016.4 "Zurich": Wangen-Lachen (LSPV) To St. Gallen-Altenrhein (LSZR)Ofmyrh OngoboNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument8 pagesJeppview For Windows: List of Pages in This Trip KitMessi Donal100% (1)
- Aerodromes (AD) : Aip Canada (Icao)Document25 pagesAerodromes (AD) : Aip Canada (Icao)autocadplease62130% (1)
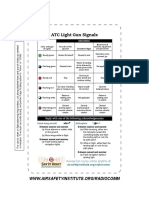
- At C Light Gun SignalsDocument1 pageAt C Light Gun SignalsJorge CastroNo ratings yet
- Simulator Assessment Candidate Briefing Guide - IFTCDocument14 pagesSimulator Assessment Candidate Briefing Guide - IFTCbilgenbatur1986No ratings yet
- Manual Reliance Inset Lights 12Document56 pagesManual Reliance Inset Lights 12sebastianNo ratings yet
- CA 139-01 Application For Aerodrome Licence - NEWDocument5 pagesCA 139-01 Application For Aerodrome Licence - NEWbosmandesireeNo ratings yet
- WPDB (Uai) - Xanana Gusmao IntlDocument7 pagesWPDB (Uai) - Xanana Gusmao IntlSmart TvNo ratings yet
- Aviation Acadamy Litreture Review, Case StudyDocument25 pagesAviation Acadamy Litreture Review, Case Studyfitsum tesfayeNo ratings yet
- 6th Sem SyllabusDocument24 pages6th Sem SyllabusVikrant DekaNo ratings yet
- Railway, Airport & Harbour Engineering-TY BTech-Part-IIDocument3 pagesRailway, Airport & Harbour Engineering-TY BTech-Part-IIAshok Kumar RajanavarNo ratings yet
- John Compiled CAADocument43 pagesJohn Compiled CAAyohannesNo ratings yet
- Approach Brief ChecklistDocument2 pagesApproach Brief Checklistraydux100% (1)
- 5210-20A TowingDocument54 pages5210-20A TowingJorge SuarezNo ratings yet
- Airbus Aircraft Characteristics - A321 Ch.4Document33 pagesAirbus Aircraft Characteristics - A321 Ch.4andreijataNo ratings yet