You might also like
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- Everything You Need to Know About Limits, Fits and TolerancesDocument22 pagesEverything You Need to Know About Limits, Fits and TolerancesAbhay Sharma100% (1)
- Assembly Drawings Balloons Parts ListsDocument23 pagesAssembly Drawings Balloons Parts ListsJonoyJetticsZêrcõnSmith100% (1)
- Die Set Engineering Handbook and CatalogDocument144 pagesDie Set Engineering Handbook and CatalogEduardo Medel50% (2)
- Engineering Drawings - ThayerDocument39 pagesEngineering Drawings - Thayermaran.suguNo ratings yet
- Gear Terminology and Its Types: Pitch CircleDocument6 pagesGear Terminology and Its Types: Pitch CircleMuhammad UmerNo ratings yet
- En 08 Mild Steel and Alloy Steels PropertiesDocument2 pagesEn 08 Mild Steel and Alloy Steels PropertiesSamratNo ratings yet
- Injection Mould Unit-IIDocument103 pagesInjection Mould Unit-II20PP001 balaji suresh bhaleNo ratings yet
- MACHINING ECONOMICS AND PRODUCT DESIGNDocument38 pagesMACHINING ECONOMICS AND PRODUCT DESIGNThiran Boy LingamNo ratings yet
- Boston Gear Helical GearsDocument14 pagesBoston Gear Helical GearssandchiNo ratings yet
- Metal Cutting Theory and MechanismDocument75 pagesMetal Cutting Theory and Mechanismnishantdubey1183No ratings yet
- Gear Teeth: Clocks and ShipsDocument16 pagesGear Teeth: Clocks and ShipsČika BrkoNo ratings yet
- Surface Plate InspectionsDocument62 pagesSurface Plate InspectionsTirth Parmar0% (1)
- Mechanical Drives Gear SelectionDocument46 pagesMechanical Drives Gear Selectionganga6013No ratings yet
- Bevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothDocument3 pagesBevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothVetri VelNo ratings yet
- Direct Gear DesignDocument7 pagesDirect Gear DesignFranco Angelo RegenciaNo ratings yet
- SHEETMETAL DESIGNDocument9 pagesSHEETMETAL DESIGNHimanshu SagarNo ratings yet
- GearsDocument14 pagesGearsZulhilmi Chik TakNo ratings yet
- Locating Principles and DevicesDocument154 pagesLocating Principles and DevicessrutiiNo ratings yet
- Keys for Transmitting MotionDocument6 pagesKeys for Transmitting MotionHashem Mohamed HashemNo ratings yet
- CH 32-Mechanical AssemblyDocument65 pagesCH 32-Mechanical AssemblyNasir MaqsoodNo ratings yet
- ABC Conveyor BookDocument15 pagesABC Conveyor BookFebri SummaNo ratings yet
- NC CNC Machine ToolDocument50 pagesNC CNC Machine ToolShoaib MultaniNo ratings yet
- Risers and Riser Design: General Design Rules For Riser Necks Used in Iron CastingsDocument62 pagesRisers and Riser Design: General Design Rules For Riser Necks Used in Iron CastingsGonzalo GiménezNo ratings yet
- GearsDocument20 pagesGearsFarhad Noruzi100% (14)
- B.1.1 Spur Gears With Gearwheels-10Document34 pagesB.1.1 Spur Gears With Gearwheels-10Ganapathy Subramaniam100% (1)
- Chapter2 Locating Principles and DevicesDocument57 pagesChapter2 Locating Principles and DevicesAbhishek KulhariNo ratings yet
- Molding Definition: Molding Is The Process ofDocument74 pagesMolding Definition: Molding Is The Process ofijotanNo ratings yet
- Broaching BasicsDocument5 pagesBroaching Basicssaritha0003No ratings yet
- Du Dub PDFDocument55 pagesDu Dub PDFSURESH100% (1)
- Abrasive Water Jet MachiningDocument14 pagesAbrasive Water Jet MachiningSanjay SharmaNo ratings yet
- Designing Parametric Bevel Gears in Catia V5Document21 pagesDesigning Parametric Bevel Gears in Catia V53pherNo ratings yet
- Gears and PulleysDocument33 pagesGears and Pulleyskim haroldNo ratings yet
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Gear and Gear TrainDocument21 pagesGear and Gear Trainm_er100No ratings yet
- Gearbox Design IitDocument25 pagesGearbox Design IitSrini VasanNo ratings yet
- Shaper and PlannerDocument33 pagesShaper and PlannerCody Lee100% (1)
- Reaming, Boring and Broaching Processes ExplainedDocument58 pagesReaming, Boring and Broaching Processes ExplainedVikas PotluriNo ratings yet
- SKF Linear BushDocument60 pagesSKF Linear BushAwdhesh Singh Bhadoriya100% (1)
- 1 1 4 A PulleydrivessprocketsDocument4 pages1 1 4 A Pulleydrivessprocketsapi-30839565067% (3)
- 2.17. Design Procedure For Progressive DiesDocument2 pages2.17. Design Procedure For Progressive DiesAnand Prajapati100% (1)
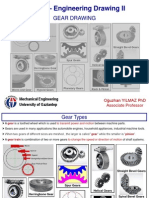
- ME 114 Engineering Drawing II Gear DrawingDocument12 pagesME 114 Engineering Drawing II Gear Drawingpradeep315No ratings yet
- Metal Cutting PDFDocument92 pagesMetal Cutting PDFJagadishchandrabose KondamudiNo ratings yet
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- Oxy-Acetylene Welding and Cutting: Electric, Forge and Thermit Welding together with related methods and materials used in metal working and the oxygen process for removal of carbonFrom EverandOxy-Acetylene Welding and Cutting: Electric, Forge and Thermit Welding together with related methods and materials used in metal working and the oxygen process for removal of carbonNo ratings yet
- A Gear Chronology: Significant Events and Dates Affecting Gear DevelopmentFrom EverandA Gear Chronology: Significant Events and Dates Affecting Gear DevelopmentNo ratings yet
- Analysing The Causes of Overheating of Heavy Duty Truck Engines and Heat Flux of Radiator Using Pareto Principle Ansys SoftwareDocument10 pagesAnalysing The Causes of Overheating of Heavy Duty Truck Engines and Heat Flux of Radiator Using Pareto Principle Ansys SoftwaremunnaNo ratings yet
- Paper ResearchDocument5 pagesPaper ResearchTeaching ClubNo ratings yet
- Fuel CellDocument39 pagesFuel CellAjay BabuNo ratings yet
- 8086 Instruction SetDocument30 pages8086 Instruction SetRajesh PathakNo ratings yet
- 03 Cotter JointDocument22 pages03 Cotter JointTeaching ClubNo ratings yet
- 02 Knuckle JointDocument24 pages02 Knuckle JointTeaching ClubNo ratings yet
- MtsDocument4 pagesMtssakthivel balamuruganNo ratings yet
- Mechatronic Lab ManualDocument23 pagesMechatronic Lab ManualTeaching ClubNo ratings yet
- Wiring Ac Doorstrike ButterflymxDocument1 pageWiring Ac Doorstrike ButterflymxadenijisegunNo ratings yet
- FBM217Document24 pagesFBM217YuriyNo ratings yet
- DS350 1319 OperatorsDocument48 pagesDS350 1319 OperatorsHusa Gomez100% (1)
- Comparative ScheduleDocument6 pagesComparative ScheduleGustavo Adolfo De Haro GonzálezNo ratings yet
- G31D-M 7 BIOS M AnualDocument34 pagesG31D-M 7 BIOS M Anualdaoud70No ratings yet
- Instrumentation Lab: Lab 3: The Parallel PortDocument16 pagesInstrumentation Lab: Lab 3: The Parallel PortNattabhat BhutrsathornNo ratings yet
- Product Data: 24ABB3 Baset13 Air Conditioner With Puronr RefrigerantDocument38 pagesProduct Data: 24ABB3 Baset13 Air Conditioner With Puronr RefrigerantNabeel SuleimanNo ratings yet
- Fact Sheet - VolvoDocument2 pagesFact Sheet - VolvoMihai AncutaNo ratings yet
- LedDocument10 pagesLedAnonymous D4V2qkNo ratings yet
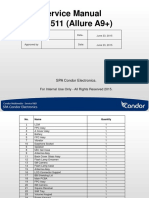
- Service Manual PGN511 (Allure A9+) : SPA Condor ElectronicsDocument15 pagesService Manual PGN511 (Allure A9+) : SPA Condor ElectronicsLife PowerNo ratings yet
- Shortage 1Document828 pagesShortage 1Juan Alejandro Gallegos FloresNo ratings yet
- 02 RALLON TechDocsDocument15 pages02 RALLON TechDocsblancohccNo ratings yet
- Home Made Metal Spinning LatheDocument7 pagesHome Made Metal Spinning Latheuragunbaga75% (4)
- P11N60Document14 pagesP11N60AndrewerNo ratings yet
- Def Stan 02-514Document76 pagesDef Stan 02-514darrenNo ratings yet
- Fuel Pump Timing Rta72Document7 pagesFuel Pump Timing Rta72Dilawar AliNo ratings yet
- Asrock 970 Extreme3Document64 pagesAsrock 970 Extreme3acchacalNo ratings yet
- NORAMLightTowers (E)Document2 pagesNORAMLightTowers (E)siranepNo ratings yet
- PM Cat-10 1031Document2 pagesPM Cat-10 1031RP POWER ELECTRICAL SALEMNo ratings yet
- Basics of ComputersDocument24 pagesBasics of ComputersAvi SharmaNo ratings yet
- Lecture On Parts of A Compound Microscope S7Document1 pageLecture On Parts of A Compound Microscope S7Jayson PinedaNo ratings yet
- Chevrolet Sail Petrol ManualDocument210 pagesChevrolet Sail Petrol Manualmohamed mezaniNo ratings yet
- TriodeDocument43 pagesTriodepraveenNo ratings yet
- 1Document4 pages1Erfan MushtaqNo ratings yet
- VSX-1026 VSX-926: Audio/Video Multi-Channel ReceiverDocument188 pagesVSX-1026 VSX-926: Audio/Video Multi-Channel ReceiverReagan WhitlyNo ratings yet
- Supplemental Specifications Hl775-9S Bucket Selection Chart: With Tier 3 Engine InstalledDocument6 pagesSupplemental Specifications Hl775-9S Bucket Selection Chart: With Tier 3 Engine InstalledRando PerezNo ratings yet
- Blue-White Rotameter Flowmeter f-440 SpecDocument2 pagesBlue-White Rotameter Flowmeter f-440 SpecdadangNo ratings yet
- Ficha Tecnica Panel Solar 100WpDocument1 pageFicha Tecnica Panel Solar 100WpManuel Ugarte HidalgoNo ratings yet
- Flat CFDK 25 Capacitive Sensor: With Versatile Mounting OptionsDocument2 pagesFlat CFDK 25 Capacitive Sensor: With Versatile Mounting OptionsSanyi48No ratings yet
- Abbrivations Wiring Diagram PDFDocument29 pagesAbbrivations Wiring Diagram PDFarupNo ratings yet