You might also like
- Bebop to the Boolean Boogie: An Unconventional Guide to ElectronicsFrom EverandBebop to the Boolean Boogie: An Unconventional Guide to ElectronicsRating: 4 out of 5 stars4/5 (3)
- PlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6From EverandPlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6No ratings yet
- IBM Z Systems Processor Optimization PrimerDocument50 pagesIBM Z Systems Processor Optimization Primerelias.ancares8635No ratings yet
- Multi ThreadingDocument168 pagesMulti ThreadingSandeep AlajangiNo ratings yet
- FPGA Lect3Document93 pagesFPGA Lect3Amit JoshiNo ratings yet
- DSP Lab Manual DSK Technical Programming With C, MATLAB Programs 2008 B.Tech ECE IV-I JNTU Hyd V1.9Document52 pagesDSP Lab Manual DSK Technical Programming With C, MATLAB Programs 2008 B.Tech ECE IV-I JNTU Hyd V1.9Chanukya Krishna Chama80% (5)
- IBM Power Systems Performance Guide Implementing and Optimizing PDFDocument372 pagesIBM Power Systems Performance Guide Implementing and Optimizing PDFDiego Alejandro Rendón ChalarcaNo ratings yet
- Multi ThreadingDocument168 pagesMulti ThreadingSumanth GangappaNo ratings yet
- Exploring Qualcomm Baseband Via ModKit - Peter Pi, XiLing Gong, and GMXP, Tencent Security Platform DepartmentDocument34 pagesExploring Qualcomm Baseband Via ModKit - Peter Pi, XiLing Gong, and GMXP, Tencent Security Platform Departmentboedak boentjirNo ratings yet
- SIMDDocument10 pagesSIMDGourav GuptaNo ratings yet
- Data-Level Parallelism in Vector, SIMD, And: GPU ArchitecturesDocument29 pagesData-Level Parallelism in Vector, SIMD, And: GPU ArchitecturesMarcelo AraujoNo ratings yet
- Design by Mohammed Intekhab KhanDocument33 pagesDesign by Mohammed Intekhab KhanpixeleratorNo ratings yet
- IJARCCE6G S Prabhudev Parallel PDFDocument4 pagesIJARCCE6G S Prabhudev Parallel PDFxiadanyNo ratings yet
- DSP Presentation Overview For ClassDocument71 pagesDSP Presentation Overview For ClassVarssha BNo ratings yet
- Multi ThreadingDocument168 pagesMulti ThreadingPrashanth RajendranNo ratings yet
- ELEC 2142 (2016) Week 1Document40 pagesELEC 2142 (2016) Week 1David VangNo ratings yet
- Is There A Real Difference Between DSPs and GPUsDocument18 pagesIs There A Real Difference Between DSPs and GPUsnckpourlasNo ratings yet
- Hardware/Software Design of Embedded Systems: Sudeep PasrichaDocument50 pagesHardware/Software Design of Embedded Systems: Sudeep PasrichapareddyNo ratings yet
- SaM2 2008Document6 pagesSaM2 2008Umer AliNo ratings yet
- Gomaa Mohammed Eldebaby: ObjectiveDocument2 pagesGomaa Mohammed Eldebaby: ObjectiveFathy RamadanNo ratings yet
- Quiz-1 Syllabus of Embedded Systems DesignDocument20 pagesQuiz-1 Syllabus of Embedded Systems DesignNamratha BNo ratings yet
- DSP ArchitectureDocument71 pagesDSP ArchitectureAnishKumar100% (1)
- Lecture 10a: Digital Signal Processors: A TI Architectural HistoryDocument61 pagesLecture 10a: Digital Signal Processors: A TI Architectural HistoryGayathriNo ratings yet
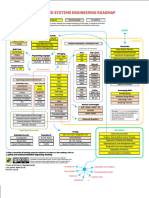
- Embedded Engineering RoadmapDocument1 pageEmbedded Engineering Roadmapaksak4010No ratings yet
- Ppar2017 Gpu 1Document61 pagesPpar2017 Gpu 1George PopovNo ratings yet
- DSP Unit-5 FinalDocument97 pagesDSP Unit-5 FinalreventhhuntNo ratings yet
- Evolution and Trends in GPU ComputingDocument7 pagesEvolution and Trends in GPU ComputingGabriel DonovanNo ratings yet
- Concurrent Programming With Threads: Rajkumar BuyyaDocument168 pagesConcurrent Programming With Threads: Rajkumar BuyyaSurangma ParasharNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- 04 - Design With MicroprocessorsDocument71 pages04 - Design With Microprocessorsgill1234jassiNo ratings yet
- DSP ArchitecturesDocument71 pagesDSP ArchitecturesTripuresh JoshiNo ratings yet
- DSDL NFU Lab 20221214 HCMUTEDocument8 pagesDSDL NFU Lab 20221214 HCMUTEPham Duy AnNo ratings yet
- NU3000Document2 pagesNU3000vantri27082004No ratings yet
- Digital Signal Processor Fundamentals and System Design: M.E. AngolettaDocument63 pagesDigital Signal Processor Fundamentals and System Design: M.E. Angolettarahul goyalNo ratings yet
- Basics of Computer by NaseerDocument48 pagesBasics of Computer by NaseerManoj KumarNo ratings yet
- 19ECE349-RISC Processor Design Using HDLDocument325 pages19ECE349-RISC Processor Design Using HDLJatin JNo ratings yet
- Computer Organization DFDocument3 pagesComputer Organization DFIMRAN PATELNo ratings yet
- Micropros E2015marwaDocument12 pagesMicropros E2015marwasayadi fatmaNo ratings yet
- IX Class Computer Science AbbreviationsDocument7 pagesIX Class Computer Science AbbreviationsAmna FaisalNo ratings yet
- ID-20193007011 Presentation About Latest Invention of MicroprocessorDocument16 pagesID-20193007011 Presentation About Latest Invention of Microprocessorabid raihanNo ratings yet
- IoT Training SystemDocument2 pagesIoT Training SystemNitaNo ratings yet
- Study of Architectural Design of VLSI: Veni Madhav Sharma, Javed Ali Mansuri, Sunil SharmaDocument2 pagesStudy of Architectural Design of VLSI: Veni Madhav Sharma, Javed Ali Mansuri, Sunil SharmaerpublicationNo ratings yet
- Computer Hardware Engineering: IS1200, Spring 2015Document17 pagesComputer Hardware Engineering: IS1200, Spring 2015Venkatadri DasariNo ratings yet
- CS 134: Operating Systems: MultiprocessingDocument16 pagesCS 134: Operating Systems: MultiprocessingMuhammad Tehseen KhanNo ratings yet
- S4421 Gpu Computing With MatlabDocument27 pagesS4421 Gpu Computing With MatlabKumar ByesNo ratings yet
- Pi SyllabusDocument2 pagesPi SyllabusHamed RazaNo ratings yet
- DSP and Multicore ProcessorsDocument12 pagesDSP and Multicore Processorsvvsulakhe6337No ratings yet
- CS244-Introduction To Embedded Systems and Ubiquitous ComputingDocument38 pagesCS244-Introduction To Embedded Systems and Ubiquitous ComputingharithNo ratings yet
- 2021 - Review of SLAM Algorithms For Indoor Mobile Robot With LIDAR and RGB-D Camera - KolhatkarDocument13 pages2021 - Review of SLAM Algorithms For Indoor Mobile Robot With LIDAR and RGB-D Camera - KolhatkarRiriNo ratings yet
- Analysis of 16 Bit Microprocessor Architecture On FPGA Using VHDLDocument8 pagesAnalysis of 16 Bit Microprocessor Architecture On FPGA Using VHDLvishwasNo ratings yet
- Analysis of 16 Bit Microprocessor Architecture On FPGA Using VHDLDocument8 pagesAnalysis of 16 Bit Microprocessor Architecture On FPGA Using VHDLyasmen alshamNo ratings yet
- ECE-VII-DSP ALGORITHMS & ARCHITECTURE Part ADocument111 pagesECE-VII-DSP ALGORITHMS & ARCHITECTURE Part AmanjumathgowdaNo ratings yet
- Digital Signal Processor Trends: IEEE Micro December 2000Document9 pagesDigital Signal Processor Trends: IEEE Micro December 2000Lomli YustoNo ratings yet
- Fundamentals of Quantitative Design and Analysis: A Quantitative Approach, Fifth EditionDocument54 pagesFundamentals of Quantitative Design and Analysis: A Quantitative Approach, Fifth Editionmwangilaureen493No ratings yet
- Ijert: 32-Bit Risc Processor For Computer ArchitectureDocument6 pagesIjert: 32-Bit Risc Processor For Computer ArchitectureTàiLươngNo ratings yet
- 115AI01Document3 pages115AI01jddh12197No ratings yet
- CS PredictedDocument7 pagesCS Predictedtarun agrawalNo ratings yet
- Palladium z1 Ds PDFDocument7 pagesPalladium z1 Ds PDFSlavica DjukanovicNo ratings yet
- Symmetric Key Cryptography On Modern Graphics HardwareDocument17 pagesSymmetric Key Cryptography On Modern Graphics Hardwaremagimic196No ratings yet
- Embedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesFrom EverandEmbedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesNo ratings yet
- Ryzen Master Quick Reference GuideDocument51 pagesRyzen Master Quick Reference GuideVoltNo ratings yet
- Thread Level Parallelism (2) : EEC 171 Parallel Architectures John Owens UC DavisDocument45 pagesThread Level Parallelism (2) : EEC 171 Parallel Architectures John Owens UC DavisFolanNo ratings yet
- CH17 COA9e Parallel ProcessingDocument52 pagesCH17 COA9e Parallel ProcessingTuấnNo ratings yet
- Multicore ComputersDocument29 pagesMulticore Computersr4h4514100% (1)
- Aca Important Questions 2 Marks 16marksDocument18 pagesAca Important Questions 2 Marks 16marksvimala60% (5)
- Multicore Processor ReportDocument19 pagesMulticore Processor ReportDilesh Kumar100% (1)
- Ecec 621 Syllabus f2010Document2 pagesEcec 621 Syllabus f2010wiznickNo ratings yet
- Lecture 02 Micro-Partition OverviewDocument17 pagesLecture 02 Micro-Partition Overviewzlxgoal100% (3)
- Basic Comparison of PowerPC and Pentium Processor FamiliesDocument14 pagesBasic Comparison of PowerPC and Pentium Processor FamilieslokendrakashyapNo ratings yet
- Unit 1 Modern ProcessorsDocument52 pagesUnit 1 Modern ProcessorsSudha PalaniNo ratings yet
- IBM Power7服务器产品线及Power7处理器介绍Document57 pagesIBM Power7服务器产品线及Power7处理器介绍Robin LiNo ratings yet
- Week 4Document13 pagesWeek 4hussmalik69No ratings yet
- 18 Multicore ComputersDocument31 pages18 Multicore ComputersTeguh Setiono0% (1)
- Parallelism in Computer ArchitectureDocument27 pagesParallelism in Computer ArchitectureKumarNo ratings yet
- COA Question Bank PDFDocument27 pagesCOA Question Bank PDFPoovarasanNo ratings yet
- 5 - ThreadDocument43 pages5 - ThreadCông Danh NguyễnNo ratings yet
- Hardware MultithreadingDocument10 pagesHardware MultithreadingFarin KhanNo ratings yet
- T1 D1 S1 Z Systems z13 UpdateDocument50 pagesT1 D1 S1 Z Systems z13 Updateelias.ancares8635No ratings yet
- Instruction Level PipeliningDocument113 pagesInstruction Level PipeliningGowri100% (1)
- MULTITHREADINGDocument30 pagesMULTITHREADINGi_2loveu3235No ratings yet
- Rome Tuning Guide PDFDocument25 pagesRome Tuning Guide PDFAjay KrishnaNo ratings yet
- Lecture 3 Flynn's Classical TaxonomyDocument29 pagesLecture 3 Flynn's Classical Taxonomynimranoor137No ratings yet
- Ec8552-Cao Unit 5Document72 pagesEc8552-Cao Unit 5Anonymous c75J3yX33No ratings yet
- Memory Hierarchy SMTDocument8 pagesMemory Hierarchy SMTRajatNo ratings yet
- Chapter 3 CPU Schedulling (Lect)Document45 pagesChapter 3 CPU Schedulling (Lect)Nasis DerejeNo ratings yet
- BM DS8910F Model 993rack Mounted Storage SystemDocument58 pagesBM DS8910F Model 993rack Mounted Storage SystemTim OSullivanNo ratings yet
- Unit 3 - Programming Multi-Core and Shared MemoryDocument100 pagesUnit 3 - Programming Multi-Core and Shared MemorySupreetha G SNo ratings yet
- Unit 5Document29 pagesUnit 5Vanathi PriyadharshiniNo ratings yet