You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Assignment - 4 - EIM - Jugul KishorDocument1 pageAssignment - 4 - EIM - Jugul KishorJugul KishorNo ratings yet
- Assignment 2 EIM Jugul KishorDocument1 pageAssignment 2 EIM Jugul KishorJugul KishorNo ratings yet
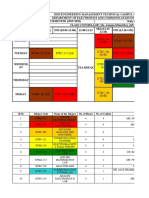
- EE - Deptt. Timetable (Online Class)Document1 pageEE - Deptt. Timetable (Online Class)Jugul KishorNo ratings yet
- Assignment - 1 - EIM - Jugul KishorDocument1 pageAssignment - 1 - EIM - Jugul KishorJugul KishorNo ratings yet
- Assignment - 3 - EIM - Jugul KishorDocument1 pageAssignment - 3 - EIM - Jugul KishorJugul KishorNo ratings yet
- Solution of Mid Semester PaperDocument13 pagesSolution of Mid Semester PaperJugul KishorNo ratings yet
- TEMP During Break ECE EVEN SEMESTER (2019-2020)Document12 pagesTEMP During Break ECE EVEN SEMESTER (2019-2020)Jugul KishorNo ratings yet
- EE - Deptt. Timetable (Online Class)Document1 pageEE - Deptt. Timetable (Online Class)Jugul KishorNo ratings yet
- Academic Calendar Spring 2019 NitdDocument2 pagesAcademic Calendar Spring 2019 NitdJugul KishorNo ratings yet
- Eee UgDocument176 pagesEee UgJugul KishorNo ratings yet
- Academic Calendar Spring 2019 NitdDocument1 pageAcademic Calendar Spring 2019 NitdJugul KishorNo ratings yet
- Steps Involved in The Application ProcessDocument3 pagesSteps Involved in The Application ProcessJugul KishorNo ratings yet
- Academic Calendar Spring 2019 NitdDocument1 pageAcademic Calendar Spring 2019 NitdJugul KishorNo ratings yet
- NIT Delhi SyllabusDocument225 pagesNIT Delhi SyllabusJugul KishorNo ratings yet
- TAP Communication TemplateDocument9 pagesTAP Communication TemplateJugul KishorNo ratings yet
- Momin 2015Document4 pagesMomin 2015Jugul KishorNo ratings yet
- Files Assigned 24-01-2017Document1 pageFiles Assigned 24-01-2017Jugul KishorNo ratings yet
- Newresume AlokfDocument2 pagesNewresume AlokfJugul KishorNo ratings yet
- Jugulkishor ResumeDocument6 pagesJugulkishor ResumeJugul KishorNo ratings yet
- Academic Calendar Odd Sem 2017-18Document1 pageAcademic Calendar Odd Sem 2017-18Jugul KishorNo ratings yet
- General InstructionsDocument3 pagesGeneral InstructionsAtom Sunil SinghNo ratings yet
- Sonu Kumar CV ECE 2012-16Document3 pagesSonu Kumar CV ECE 2012-16Jugul KishorNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Esa-110 111 OmeDocument28 pagesEsa-110 111 OmeHikmat RahimovNo ratings yet
- 6ES71555AA000AA0 Datasheet ET200 IM155 5pn PDFDocument4 pages6ES71555AA000AA0 Datasheet ET200 IM155 5pn PDFHhmAitNo ratings yet
- Value Based Questions: Physics: 1. Class XI Motion in A Straight LineDocument11 pagesValue Based Questions: Physics: 1. Class XI Motion in A Straight LineRakesh ChandraNo ratings yet
- ETE423 EEE423 - Lecture 6 - Multipleaxing SONETDocument54 pagesETE423 EEE423 - Lecture 6 - Multipleaxing SONETShadman Rahman 1815396660No ratings yet
- Channel Estimation in MIMODocument33 pagesChannel Estimation in MIMOMADHUR CHAUDHARYNo ratings yet
- Indiabix 1ST HalfDocument45 pagesIndiabix 1ST HalfCaryl Kim DelacruzNo ratings yet
- CMZ 700 SeriesDocument1 pageCMZ 700 SeriesborisgolodenkoNo ratings yet
- Onida 21-29oxygenthunder Uoc GoldDocument62 pagesOnida 21-29oxygenthunder Uoc GoldGireesh KumarNo ratings yet
- Pred MerDocument226 pagesPred MerKemo Zico DivanefendicNo ratings yet
- How To Estimate and Reduce PCB Assembly CostDocument18 pagesHow To Estimate and Reduce PCB Assembly CostjackNo ratings yet
- Product Name: Model Name:: 2-Wire Video Door-Phone Dpv-2KeDocument4 pagesProduct Name: Model Name:: 2-Wire Video Door-Phone Dpv-2KeMalikBoussettaNo ratings yet
- Thermal Overload ProtectionDocument5 pagesThermal Overload ProtectionJigme TamangNo ratings yet
- UNIT-one-IT2402-MOBILE COMMUNICATION Unit 1 2 MarksDocument6 pagesUNIT-one-IT2402-MOBILE COMMUNICATION Unit 1 2 Marksdatatycoon100% (1)
- Unit 2 Non-Inverting and Inverting AmplifierDocument6 pagesUnit 2 Non-Inverting and Inverting AmplifierUmaNo ratings yet
- Applied Electricity - Laboratory Reports 1Document12 pagesApplied Electricity - Laboratory Reports 1Pradeep JayasingheNo ratings yet
- 7B10v1.1 (G52-7B101X4) (MEG Z390 GODLIKE) PDFDocument111 pages7B10v1.1 (G52-7B101X4) (MEG Z390 GODLIKE) PDFJosephNo ratings yet
- Led Display PDFDocument12 pagesLed Display PDFIrwin DarmansyahNo ratings yet
- Flicker Review Temporal Light Modulation Stimulus Responses and MeasuresDocument34 pagesFlicker Review Temporal Light Modulation Stimulus Responses and MeasuresEyex97No ratings yet
- Barnett, S J - On The Cavendish Experiment and The Law of Inverse Squares in ElectrostaticsDocument3 pagesBarnett, S J - On The Cavendish Experiment and The Law of Inverse Squares in ElectrostaticsVITOR DOLIWANo ratings yet
- Weidmuller 2001350000 - CAT8 - 2015 - 16 - ENDocument497 pagesWeidmuller 2001350000 - CAT8 - 2015 - 16 - ENdNo ratings yet
- 2132 Controller: Installation, Operation and Maintenance InstructionsDocument16 pages2132 Controller: Installation, Operation and Maintenance Instructionsatorresh090675No ratings yet
- Work Function and Process IntegrationDocument203 pagesWork Function and Process IntegrationPranita SwainNo ratings yet
- VentilDocument12 pagesVentilpeter_ganjiNo ratings yet
- Rezgui-An Overview of Optical FibersDocument8 pagesRezgui-An Overview of Optical FibersMarciano SantamariaNo ratings yet
- Microprocessor Lab ManualDocument15 pagesMicroprocessor Lab ManualNicole HyominNo ratings yet
- Market Yourself - Assignment 1Document5 pagesMarket Yourself - Assignment 1api-2691262600% (1)
- ECE-EDA LEC02 DiodesDocument41 pagesECE-EDA LEC02 DiodesKim OpenaNo ratings yet
- Comfort-Aire CMA1412SG-0 Specification SheetDocument4 pagesComfort-Aire CMA1412SG-0 Specification SheetRudieNo ratings yet
- EURAMET-Cg-15.01 Guidelines Calibration Digital Multi MetersDocument18 pagesEURAMET-Cg-15.01 Guidelines Calibration Digital Multi Meterswalterjnr100% (1)