You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Finite Automata Course Notes by Mark V. LawsonDocument194 pagesFinite Automata Course Notes by Mark V. LawsonPeter_Shook100% (2)
- CBSE UGC NET Computer Science SyllabusDocument17 pagesCBSE UGC NET Computer Science SyllabusShruti Arora100% (1)
- An Approach Towards The Design of A Petlyuk Column Using HYSYSDocument11 pagesAn Approach Towards The Design of A Petlyuk Column Using HYSYSsamandondonNo ratings yet
- Compiler Design Concepts, Worked Out Examples and Mcqs For Net/SetDocument101 pagesCompiler Design Concepts, Worked Out Examples and Mcqs For Net/SetRobelNo ratings yet
- JFLAP Manual PDFDocument23 pagesJFLAP Manual PDFdolivasdNo ratings yet
- HDL Implementation of Vending Machine by KCPSM3 ProcessorDocument4 pagesHDL Implementation of Vending Machine by KCPSM3 ProcessorEditor IJRITCCNo ratings yet
- Green ChemistryDocument16 pagesGreen ChemistrysamandondonNo ratings yet
- Operation and Dynamic Behavior of Wire Mesh PadsDocument16 pagesOperation and Dynamic Behavior of Wire Mesh PadssamandondonNo ratings yet
- Macro Scale Modeling and Simulation of Two Phase Flow in Fibrous Liquid Aerosol FiltersDocument13 pagesMacro Scale Modeling and Simulation of Two Phase Flow in Fibrous Liquid Aerosol FilterssamandondonNo ratings yet
- Application of Numerical Simulation in The Design of Wire-Mesh Mist EliminatorDocument4 pagesApplication of Numerical Simulation in The Design of Wire-Mesh Mist EliminatorsamandondonNo ratings yet
- Ox or Na.: Ell Horror-Les-4 - 4 - E. S NDocument7 pagesOx or Na.: Ell Horror-Les-4 - 4 - E. S NsamandondonNo ratings yet
- May 30, 1944. P. C. Dixon 2,349,944: Method of and Means For Separating Liquid and Gas or Gaseous FluidDocument8 pagesMay 30, 1944. P. C. Dixon 2,349,944: Method of and Means For Separating Liquid and Gas or Gaseous FluidsamandondonNo ratings yet
- Design and Control of A Separation Process For Bioethanol Purification by Reactive DistillationDocument6 pagesDesign and Control of A Separation Process For Bioethanol Purification by Reactive DistillationsamandondonNo ratings yet
- Optimal Selection of Operating Pressure For Distillation ColumnsDocument17 pagesOptimal Selection of Operating Pressure For Distillation ColumnssamandondonNo ratings yet
- Integrated Design and Control of Chemical Processes - Part I - Revision and ClassificationDocument16 pagesIntegrated Design and Control of Chemical Processes - Part I - Revision and ClassificationsamandondonNo ratings yet
- Development of Inherent Safety Benefits Index To Analyse The Impact of Inherent Safety ImplementationDocument19 pagesDevelopment of Inherent Safety Benefits Index To Analyse The Impact of Inherent Safety ImplementationsamandondonNo ratings yet
- The Higher Order Unscented FilterDocument6 pagesThe Higher Order Unscented FiltersamandondonNo ratings yet
- Handout 4: Circle and Popov Criteria: Linear SystemDocument9 pagesHandout 4: Circle and Popov Criteria: Linear SystemsamandondonNo ratings yet
- App SRM Unit 5 NotesDocument24 pagesApp SRM Unit 5 NotesHarshit BatraNo ratings yet
- Bidyut Karmakar Resume 2Document4 pagesBidyut Karmakar Resume 2tuydib100% (2)
- Modeling Event-Based Behavior With State Machines: Critical Embedded SystemsDocument49 pagesModeling Event-Based Behavior With State Machines: Critical Embedded Systemslucas johnNo ratings yet
- Cosc 340Document3 pagesCosc 340Nancy JumaNo ratings yet
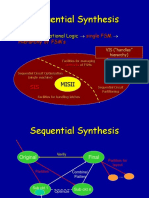
- Sequential Synthesis: Combinational LogicDocument35 pagesSequential Synthesis: Combinational Logicshri3415No ratings yet
- CH 1 - Introduction To FLATDocument36 pagesCH 1 - Introduction To FLATTshu tshuNo ratings yet
- Automata Theory (ITC404) : SEIT-SEM-IV (R-2019) Deterministic Finite Automata (Dfa)Document34 pagesAutomata Theory (ITC404) : SEIT-SEM-IV (R-2019) Deterministic Finite Automata (Dfa)JACK HITLERNo ratings yet
- CS6503 Toc QB2 RejinpaulDocument13 pagesCS6503 Toc QB2 RejinpaulvanithaNo ratings yet
- 21CS51 ATCD Module 1 - 1Document96 pages21CS51 ATCD Module 1 - 1Hija HappyNo ratings yet
- MphilDocument6 pagesMphildevarasuthillaiNo ratings yet
- Compiler DesignDocument2 pagesCompiler DesignDreamtech Press100% (1)
- Chapter 5 - Finite AutomataDocument45 pagesChapter 5 - Finite AutomataDaryl Ivan Hisola86% (22)
- 15 Cs 54Document79 pages15 Cs 54Chaithra kNo ratings yet
- Rough Set Adaptive in The Model Based of Cellular Automata and Multi-AgentsDocument7 pagesRough Set Adaptive in The Model Based of Cellular Automata and Multi-AgentsManaging Editor Journal of ComputingNo ratings yet
- The Superior College, Lahore: (Final Term Exam)Document1 pageThe Superior College, Lahore: (Final Term Exam)abubakar chNo ratings yet
- Digital Logic Design: VHDL Coding For Fpgas Unit 6Document15 pagesDigital Logic Design: VHDL Coding For Fpgas Unit 6Srinivas CherukuNo ratings yet
- FLC Problems Solutions PDFDocument231 pagesFLC Problems Solutions PDFslogeshwariNo ratings yet
- Cadence Nclaunch LabDocument86 pagesCadence Nclaunch Labsweety987No ratings yet
- STT TutorialDocument23 pagesSTT TutorialJose Herrera BrañesNo ratings yet
- 6 - State Table Based TestingDocument31 pages6 - State Table Based TestingThe Smart Boy KungFuPawnNo ratings yet
- Unit-4 Turing Machine (TOC)Document87 pagesUnit-4 Turing Machine (TOC)Kashish Bardeja PIET21CS092No ratings yet
- UNIT 1 TOC Sem5 RGPVDocument12 pagesUNIT 1 TOC Sem5 RGPVHolija100% (1)
- Formal Language and Automata Theory Notes FDocument47 pagesFormal Language and Automata Theory Notes FIam BunnyNo ratings yet
- Group Assignment - Formal Language TheoryDocument8 pagesGroup Assignment - Formal Language Theoryhak advNo ratings yet
- 3 - 4 - 12. Pushdown Automata (24 Min.)Document8 pages3 - 4 - 12. Pushdown Automata (24 Min.)LalalalalalaNo ratings yet