You might also like
- Resume Kartick PrasadDocument4 pagesResume Kartick PrasadKARTICK PRASADNo ratings yet
- Kartick Prasad ResumeDocument4 pagesKartick Prasad ResumeKARTICK PRASADNo ratings yet
- Lalit Resume-2023-LatestDocument2 pagesLalit Resume-2023-LatestDrew LadlowNo ratings yet
- Shrikant Shinde-1Document4 pagesShrikant Shinde-1Shrikant ShindeNo ratings yet
- Instrumentation Designer - 8+Document5 pagesInstrumentation Designer - 8+john marshalNo ratings yet
- Logesh RagupathiDocument3 pagesLogesh RagupathiSaravanakumar RamdossNo ratings yet
- Ashish Shirsat 9 YRDocument2 pagesAshish Shirsat 9 YRvattipalli murariNo ratings yet
- Jatin Pandey: EducationDocument2 pagesJatin Pandey: EducationJatin PandeyNo ratings yet
- Cvand Cover LetteerDocument5 pagesCvand Cover LetteerMudassar ChaudhryNo ratings yet
- Resume - Product Design EngineerDocument6 pagesResume - Product Design EngineerPradeep RathodeNo ratings yet
- AutoCAD Draftsman (Samad)Document4 pagesAutoCAD Draftsman (Samad)samadNo ratings yet
- AEH Company Profile-1Document14 pagesAEH Company Profile-1Hrishikesh RaiNo ratings yet
- Rahul Updated Resume.Document5 pagesRahul Updated Resume.rahul pandeyNo ratings yet
- Pranav Jadhav Resume YoE 3.3 Design EnggDocument2 pagesPranav Jadhav Resume YoE 3.3 Design EnggRahul PatankarNo ratings yet
- CV Final 04-09-2020 - 04-Sep-20 - 20.31.45Document2 pagesCV Final 04-09-2020 - 04-Sep-20 - 20.31.45Karun KumarNo ratings yet
- Prabhu - CV - Structural DesignerDocument4 pagesPrabhu - CV - Structural DesignerprabhutmuNo ratings yet
- Supriya Vinod Bhirud ResumeDocument5 pagesSupriya Vinod Bhirud ResumeEjaz KNo ratings yet
- Resume Prince Raj 29-08-2022Document3 pagesResume Prince Raj 29-08-2022vijayNo ratings yet
- Sunil Mpatel: Mechatronics EngineerDocument2 pagesSunil Mpatel: Mechatronics EngineerAnonymous ffYiS7CGNo ratings yet
- Leroy Dmello 2022 Updated Resume.Document5 pagesLeroy Dmello 2022 Updated Resume.LeroyNo ratings yet
- Prabhaharan.P: No. 10, Sarojini Street ExtnDocument6 pagesPrabhaharan.P: No. 10, Sarojini Street ExtnMANI BHARATH GANESANNo ratings yet
- CV Design EngineerDocument3 pagesCV Design EngineerAhmed ShariffNo ratings yet
- Abhishek Ugnx 2+ SeatingDocument2 pagesAbhishek Ugnx 2+ SeatingYuuvraj SinghNo ratings yet
- Kasu La Nagara JuDocument4 pagesKasu La Nagara JuMuhammad Rafi sayedNo ratings yet
- Ashfaque Ahmed: Engineer - PipingDocument3 pagesAshfaque Ahmed: Engineer - PipingMasoodMiyanNo ratings yet
- E-Mail: Cell: 00966-0572923751: Shabeer.SDocument5 pagesE-Mail: Cell: 00966-0572923751: Shabeer.Ssikander843562No ratings yet
- Elv DraftsmanDocument2 pagesElv Draftsmanmohamed razeethNo ratings yet
- Naukri NitinNamdevRane. 18315862 - 06 06 - 1Document3 pagesNaukri NitinNamdevRane. 18315862 - 06 06 - 1Jerish JohnNo ratings yet
- Sanjeev CVDocument4 pagesSanjeev CVmddilshadalam439No ratings yet
- BenchmarkDocument4 pagesBenchmarkKiran KumarNo ratings yet
- Ravi Babaladi: Job SummaryDocument2 pagesRavi Babaladi: Job SummaryRavi BabaladiNo ratings yet
- Resume Ravi2Document2 pagesResume Ravi2Ravi BabaladiNo ratings yet
- Resume FormatDocument3 pagesResume FormatSandeep ChoudharyNo ratings yet
- Ram Feb 2020Document2 pagesRam Feb 2020piyush sokhiNo ratings yet
- PDMSDocument3 pagesPDMSravirawat15No ratings yet
- Cover Letter For The Job Application: Bikash GuptaDocument3 pagesCover Letter For The Job Application: Bikash GuptaMukharram KhanNo ratings yet
- MaeezAslami Shaikh 551585356Document3 pagesMaeezAslami Shaikh 551585356RAM SANNo ratings yet
- Yenuguthala Chandra Sekhar: Cad EngineerDocument4 pagesYenuguthala Chandra Sekhar: Cad Engineerchandrasekhar y47No ratings yet
- Leroy Dmello 2022 Updated Resume.Document5 pagesLeroy Dmello 2022 Updated Resume.LeroyNo ratings yet
- Ravi Babaladi: Experience SummaryDocument3 pagesRavi Babaladi: Experience SummaryRavi BabaladiNo ratings yet
- Nagendra B N: #4, 33 Main Road Astalashmi Layout Sarakki Kere 6 Phase JP Nagar Bangalore-5600078Document6 pagesNagendra B N: #4, 33 Main Road Astalashmi Layout Sarakki Kere 6 Phase JP Nagar Bangalore-5600078muhamad erfanNo ratings yet
- Shailesh Ashok Chaudhari - r02Document3 pagesShailesh Ashok Chaudhari - r02Shailesh ChaudhariNo ratings yet
- Pratham Sharma: Carrier ObjectivesDocument2 pagesPratham Sharma: Carrier ObjectivesPrathamNo ratings yet
- Akash Pawar Contact No: +91 9049282593 B.E. (Mechanical) E-MailDocument3 pagesAkash Pawar Contact No: +91 9049282593 B.E. (Mechanical) E-MailPushpa MandloiNo ratings yet
- CV SinghDocument4 pagesCV SinghAjad SinghNo ratings yet
- DibyenduchelDocument4 pagesDibyenduchelArindam DasNo ratings yet
- Vijetha ResumeDocument3 pagesVijetha ResumemargondlaNo ratings yet
- K.Suresh - Structural Detailer CVDocument5 pagesK.Suresh - Structural Detailer CVRamkishore ChelvinMurugeshNo ratings yet
- Harsh Bhimani C.V.0404Document2 pagesHarsh Bhimani C.V.0404Harsh BhimaniNo ratings yet
- Background: Piping/Mech/Cad & Sp3D Designer Mob. No.: 08828459024Document3 pagesBackground: Piping/Mech/Cad & Sp3D Designer Mob. No.: 08828459024sahaNo ratings yet
- Resume For R & D - Npd-Process EngineerDocument5 pagesResume For R & D - Npd-Process EngineerpramodNo ratings yet
- Nikhilsahud@gmail DotcomDocument4 pagesNikhilsahud@gmail DotcomKarthik SekarNo ratings yet
- Sunil Kumar: Email MobileDocument3 pagesSunil Kumar: Email MobileSunil Kumar PoddarNo ratings yet
- Harsh Bhimani B H: Address: Phone: EmailDocument2 pagesHarsh Bhimani B H: Address: Phone: EmailHarsh BhimaniNo ratings yet
- Naukri QamarAlam (18y 0m)Document8 pagesNaukri QamarAlam (18y 0m)Shubha S SNo ratings yet
- Sagar DhumalDocument2 pagesSagar Dhumalranaware ajinkyaNo ratings yet
- L +009660533812404 Aqama Status:Transferable Objectives: June 2015 To Present, Saudi ArabiaDocument3 pagesL +009660533812404 Aqama Status:Transferable Objectives: June 2015 To Present, Saudi ArabiaSyed Ehtesham aliNo ratings yet
- Sidram V. Kedar: Curriculum VitaeDocument3 pagesSidram V. Kedar: Curriculum VitaesidramNo ratings yet
- Getting Startedwith Maya 8Document682 pagesGetting Startedwith Maya 8KARTICK PRASADNo ratings yet
- Simulation of Spot Welding Robot For Automotive Manufacturing ApplicationDocument14 pagesSimulation of Spot Welding Robot For Automotive Manufacturing ApplicationKARTICK PRASADNo ratings yet
- Basics Guide: Autodesk Maya 2020Document40 pagesBasics Guide: Autodesk Maya 2020KARTICK PRASADNo ratings yet
- Government of Odisha: Office of Special Relief CommissionerDocument11 pagesGovernment of Odisha: Office of Special Relief CommissionerKARTICK PRASADNo ratings yet
- This Is A System-Generated Statement. Hence, It Does Not Require Any SignatureDocument15 pagesThis Is A System-Generated Statement. Hence, It Does Not Require Any SignatureKARTICK PRASADNo ratings yet
- Curriculum Vitae: Ronit Rajendra PatilDocument3 pagesCurriculum Vitae: Ronit Rajendra PatilKARTICK PRASADNo ratings yet
- Wibu Licensing Guide Cenit PDFDocument15 pagesWibu Licensing Guide Cenit PDFKARTICK PRASADNo ratings yet
- GSTCredit Note DL2202112 AD81754Document1 pageGSTCredit Note DL2202112 AD81754KARTICK PRASADNo ratings yet
- Gram Panchayat List of Balasore District: Block: BahanagaDocument10 pagesGram Panchayat List of Balasore District: Block: BahanagaKARTICK PRASAD100% (2)
- Shubham Jaiswal: Education CredentialsDocument3 pagesShubham Jaiswal: Education CredentialsKARTICK PRASADNo ratings yet
- Yta Dash Process - Rev 3RD - 5 May 20Document28 pagesYta Dash Process - Rev 3RD - 5 May 20KARTICK PRASADNo ratings yet
- Group Corporate HR - Training Calendar For JANUARY 2021Document1 pageGroup Corporate HR - Training Calendar For JANUARY 2021KARTICK PRASADNo ratings yet
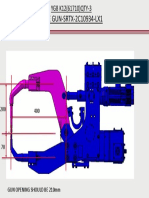
- Gun Modification For 61710 Yg8 K12Document1 pageGun Modification For 61710 Yg8 K12KARTICK PRASADNo ratings yet
- DESIGN CalculationDocument47 pagesDESIGN CalculationZayyan Romjon100% (2)
- FlairsTech - SE Introduction 01Document58 pagesFlairsTech - SE Introduction 01tahazamzamNo ratings yet
- Pile Formula CP4 Hiley Metric PDFDocument4 pagesPile Formula CP4 Hiley Metric PDFsstibisNo ratings yet
- CSDocument2 pagesCSharry khanNo ratings yet
- Compaction of SoilDocument5 pagesCompaction of SoilthisulaNo ratings yet
- Learning Lessons From Forensic Investigation of Corrosion FailuresDocument7 pagesLearning Lessons From Forensic Investigation of Corrosion FailuresjorgebbcaargNo ratings yet
- Charles W. Barbrey: Cbarbre@clemson - EduDocument2 pagesCharles W. Barbrey: Cbarbre@clemson - EduChase BarbreyNo ratings yet
- Work Transfer Authorization (WTA) ProcedureDocument15 pagesWork Transfer Authorization (WTA) ProcedureOkinawa TeakNo ratings yet
- Handbook of Petroleum Refining ProcessesDocument5 pagesHandbook of Petroleum Refining Processeselsayed amerNo ratings yet
- Calculations of Slab Thickness and Dead Load & Live Load For BuildingDocument10 pagesCalculations of Slab Thickness and Dead Load & Live Load For BuildingAlaa SalimNo ratings yet
- Wbcs ExaminationDocument19 pagesWbcs ExaminationMUMPI RAHAMANNo ratings yet
- Insights Into Sustainable EngineeringDocument24 pagesInsights Into Sustainable Engineeringcmanning17No ratings yet
- New Microsoft Word DocumentDocument3 pagesNew Microsoft Word DocumentAshraful HasanNo ratings yet
- HPS Catalog Dry-Type Medium VoltageDocument15 pagesHPS Catalog Dry-Type Medium VoltageEmilio SalazarNo ratings yet
- Software System Safety HandbookDocument247 pagesSoftware System Safety HandbookbtjajadiNo ratings yet
- Chapter 5 Design Guidelines Section 5.2 Structural Subsection 5.2.3 Non-Building StructuresDocument2 pagesChapter 5 Design Guidelines Section 5.2 Structural Subsection 5.2.3 Non-Building StructureskapsarcNo ratings yet
- Engg CollegesDocument3,660 pagesEngg CollegeseraparnagoelNo ratings yet
- Implementation of Lean Construction Techniques For Minimizing The Risks Effect On Construction ProjectDocument49 pagesImplementation of Lean Construction Techniques For Minimizing The Risks Effect On Construction ProjectJohn PaulNo ratings yet
- Hydro Culv 21Document10 pagesHydro Culv 21rungekutasaNo ratings yet
- Company Profile PT. FIBDocument23 pagesCompany Profile PT. FIBziedan alfahrizyNo ratings yet
- Sbi 189Document101 pagesSbi 189Zhaneta AvtanskaNo ratings yet
- IIT Delhi GATE Sore Cut Off For MDocument3 pagesIIT Delhi GATE Sore Cut Off For MNataraja perumalNo ratings yet
- BBC Profile 2075Document13 pagesBBC Profile 2075XenoldNo ratings yet
- Establishment ListDocument3 pagesEstablishment ListRiya100% (1)
- CV FinalDocument1 pageCV Finalapi-417066611No ratings yet
- Blackbook Sample For Engineering ProjectsDocument26 pagesBlackbook Sample For Engineering ProjectsVikas Beri100% (3)
- FM200 SpecDocument14 pagesFM200 SpecDak Serik100% (1)
- Risk Assessment of Floating Offshore Wind Turbine Based On Correlation FMEADocument7 pagesRisk Assessment of Floating Offshore Wind Turbine Based On Correlation FMEA洪琳雅No ratings yet