You might also like
- Atos Electronic DriversDocument6 pagesAtos Electronic DriversService - Anda Hydraulics Asia Pte LtdNo ratings yet
- Analog Electronic Drivers E-Ri-Te, E-Ri-LeDocument4 pagesAnalog Electronic Drivers E-Ri-Te, E-Ri-Leclaudiomiro_cam_6795No ratings yet
- Analog Electronic Drivers E-Ri-Ae: Integral-To-Valve Format, For Proportional Valves Without TransducerDocument3 pagesAnalog Electronic Drivers E-Ri-Ae: Integral-To-Valve Format, For Proportional Valves Without TransducerDanilo DiogoNo ratings yet
- Digital Electronic E-BM-AS Drivers: DIN-rail Format, For Proportional Valves Without TransducerDocument6 pagesDigital Electronic E-BM-AS Drivers: DIN-rail Format, For Proportional Valves Without TransducerDavid RanieriNo ratings yet
- G140 Regolatore ElettronicoDocument4 pagesG140 Regolatore ElettronicoDavid RanieriNo ratings yet
- Proportional Directional Valves DHZO-A and DKZOR-ADocument8 pagesProportional Directional Valves DHZO-A and DKZOR-ASzilárd SNo ratings yet
- Analog Electronic E-MI-AC Drivers: DIN 43650 Plug-In Format, For Proportional Valves Without TransducerDocument4 pagesAnalog Electronic E-MI-AC Drivers: DIN 43650 Plug-In Format, For Proportional Valves Without Transducerfrancis_15inNo ratings yet
- Proportional Relief Valves Rzmo-Aes and Hzmo-ADocument6 pagesProportional Relief Valves Rzmo-Aes and Hzmo-AЕвгений ЛиNo ratings yet
- FS175 - Dpzo Leb 2Document12 pagesFS175 - Dpzo Leb 2Service - Anda Hydraulics Asia Pte LtdNo ratings yet
- Proportianal Valve CatheadDocument4 pagesProportianal Valve CatheadcarlosorizabaNo ratings yet
- Analog Electronic E-ME-AC Drivers: Obsolete Components - Availability On RequestDocument4 pagesAnalog Electronic E-ME-AC Drivers: Obsolete Components - Availability On RequestCommunications ShipyardNo ratings yet
- Analog Electronic E-ME-AC Drivers: Eurocard Format, For Proportional Valves Without TransducerDocument4 pagesAnalog Electronic E-ME-AC Drivers: Eurocard Format, For Proportional Valves Without TransducerDANIEL LNo ratings yet
- RZMODocument6 pagesRZMOHarish RaoNo ratings yet
- Electronic Drivers E-Rp-Ac: Analog, Sealed and Rugged Box, For Proportional Valves Without TransducerDocument4 pagesElectronic Drivers E-Rp-Ac: Analog, Sealed and Rugged Box, For Proportional Valves Without TransducerCommunications ShipyardNo ratings yet
- 7VE5xx1 Catalog SIP2004s enDocument2 pages7VE5xx1 Catalog SIP2004s enWalter CataldoNo ratings yet
- 4/2-And 4/3-Way Proportional Directional Valves, Direct Operated, Without Electrical Position Feedback, Without/with Integrated Electronics (OBE)Document16 pages4/2-And 4/3-Way Proportional Directional Valves, Direct Operated, Without Electrical Position Feedback, Without/with Integrated Electronics (OBE)Rolando Jara YoungNo ratings yet
- ATO-D80028 UnlockedDocument8 pagesATO-D80028 UnlockedWu MonaNo ratings yet
- Proportional Directional Valves DHZO-A and DKZOR-ADocument6 pagesProportional Directional Valves DHZO-A and DKZOR-ANunoNo ratings yet
- AP2014ADocument12 pagesAP2014ARene MarangonNo ratings yet
- Atos - VV Prop TN6 DHZO e TN 10 DKZORDocument6 pagesAtos - VV Prop TN6 DHZO e TN 10 DKZORNkma Borges100% (1)
- Ap2014a AnachipDocument12 pagesAp2014a Anachipcesar meriñoNo ratings yet
- F300 PDFDocument8 pagesF300 PDFaaaNo ratings yet
- Zp120n EngDocument8 pagesZp120n EngAbdelwhab ElsaftyNo ratings yet
- 104 en - Multifunction Power Supply, Large - PRA-MPS3Document23 pages104 en - Multifunction Power Supply, Large - PRA-MPS3Wilmer MojicaNo ratings yet
- Proportional Directional Valves Dhzo-Te Dkzor-Te: Direct Operated, With Position Transducer, ISO 4401 Size 06 and 10Document8 pagesProportional Directional Valves Dhzo-Te Dkzor-Te: Direct Operated, With Position Transducer, ISO 4401 Size 06 and 10NunoNo ratings yet
- Drawworks Disc Brake HPU Proportional ValveDocument4 pagesDrawworks Disc Brake HPU Proportional ValveNoureddine AdjNo ratings yet
- Analog Electronic E-BM-AC Drivers: Obsolete Components - Availability On RequestDocument4 pagesAnalog Electronic E-BM-AC Drivers: Obsolete Components - Availability On RequestCommunications ShipyardNo ratings yet
- EN199910Document51 pagesEN199910Abderrazek YacoubiNo ratings yet
- Power: Single Phase Industrial UPS SystemsDocument8 pagesPower: Single Phase Industrial UPS SystemsBirNo ratings yet
- REL350 Descriptive BulletinDocument7 pagesREL350 Descriptive BulletinYrene De Jesus Alvarez VasquezNo ratings yet
- Valvula Atos Emet Codigo G140Document4 pagesValvula Atos Emet Codigo G140ALFREDO ACUÑANo ratings yet
- Data Sheets Bulletin Electric Actuators Model Epi 2 Keystone Us en 2721364Document16 pagesData Sheets Bulletin Electric Actuators Model Epi 2 Keystone Us en 2721364Nag RajNo ratings yet
- Ecu1000 Electronic Control UnitDocument8 pagesEcu1000 Electronic Control UnitcostelchelariuNo ratings yet
- Electric Manual WSX Auto Focus HeadsDocument50 pagesElectric Manual WSX Auto Focus HeadsAndré TrevizanNo ratings yet
- DME440Document18 pagesDME440IvegaNo ratings yet
- 001344371-an-01-en-GMC MEISTERPAKET SEC BASE10 M7050 V902Document72 pages001344371-an-01-en-GMC MEISTERPAKET SEC BASE10 M7050 V902Andi IoanNo ratings yet
- Sineax Dme 440bDocument18 pagesSineax Dme 440bPacoNo ratings yet
- Chinese SSPCO UPSDocument2 pagesChinese SSPCO UPSdhaferNo ratings yet
- Vectron Elektronik Manual DatasheetDocument8 pagesVectron Elektronik Manual DatasheetGetulio CamarottoNo ratings yet
- PR1500LCDDocument2 pagesPR1500LCDEnrique Esquivel PalaciosNo ratings yet
- Features General Description: PWM/PFM Dual-Mode Step-Down Switching RegulatorDocument7 pagesFeatures General Description: PWM/PFM Dual-Mode Step-Down Switching RegulatorMohit KaundalNo ratings yet
- Proportional Directional Valve DHZO-A (E) - 060-S3: Single Solenoid, Without Position Transducer, 3 PositionDocument2 pagesProportional Directional Valve DHZO-A (E) - 060-S3: Single Solenoid, Without Position Transducer, 3 PositionAnonymous Xz3PgZR8No ratings yet
- Rexroth 4WS 2E Re29583Document20 pagesRexroth 4WS 2E Re29583muhammetnaberNo ratings yet
- CTEU-EP 2017-02a 8067819g1Document2 pagesCTEU-EP 2017-02a 8067819g1Raphael Paulino BertiNo ratings yet
- 308pq 5px Broch AnzDocument2 pages308pq 5px Broch AnzNot I gonahNo ratings yet
- DSE556 Data SheetDocument2 pagesDSE556 Data SheetIonut relu IordacheNo ratings yet
- Datasheet: Smart Solutions For New Energy SystemsDocument3 pagesDatasheet: Smart Solutions For New Energy SystemsCarlos GomezNo ratings yet
- NE570 ApplicationsDocument6 pagesNE570 ApplicationsAbcd9032100% (1)
- Product and Applications Description Application ProgramsDocument5 pagesProduct and Applications Description Application ProgramsramyNo ratings yet
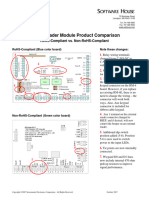
- RM 4e Rohs Vs Non Rohs Ri LT enDocument1 pageRM 4e Rohs Vs Non Rohs Ri LT enjohan orjuelaNo ratings yet
- Senkronizasyon Modülü 01Document2 pagesSenkronizasyon Modülü 01sabujNo ratings yet
- EPower 10-80 3-3 2018 PDFDocument4 pagesEPower 10-80 3-3 2018 PDFWawan SetiawanNo ratings yet
- Rexroth R900909367 Datasheet PDFDocument18 pagesRexroth R900909367 Datasheet PDFTnT ElektricNo ratings yet
- 000-1-AN109 StandardDocument9 pages000-1-AN109 StandardSyed Wajih Ul HassanNo ratings yet
- Lab3 S L D: ELF Evelling Evice FOR Aerial PlatformsDocument4 pagesLab3 S L D: ELF Evelling Evice FOR Aerial PlatformsA1963No ratings yet
- HP 4142Document22 pagesHP 4142Edward ConalNo ratings yet
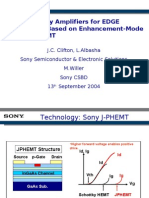
- High Efficiency Amplifiers For EDGE Applications Based On Enhancement-Mode Junction PHEMTDocument19 pagesHigh Efficiency Amplifiers For EDGE Applications Based On Enhancement-Mode Junction PHEMTChelva SelvaNo ratings yet
- PowerPac™ Basic Power Supply - Bio-RadDocument3 pagesPowerPac™ Basic Power Supply - Bio-RadKaren Pachchigar 1No ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Chapter2 Basics ExDocument6 pagesChapter2 Basics Exiin sukniaNo ratings yet
- LabVIEW State MachineDocument15 pagesLabVIEW State Machineiin sukniaNo ratings yet
- Manual QhmiDocument305 pagesManual Qhmiiin sukniaNo ratings yet
- DS 98031 Kvaser OBD2 Extension CableDocument1 pageDS 98031 Kvaser OBD2 Extension Cableiin sukniaNo ratings yet
- Product News: Cat C7 ACERT™ Marine Propulsion EngineDocument32 pagesProduct News: Cat C7 ACERT™ Marine Propulsion Engineiin sukniaNo ratings yet
- HTTPDocument14 pagesHTTPjamalabbasi281998No ratings yet
- ITE-6300-2013T (UGRD) Cloud Computing & Internet o TDocument9 pagesITE-6300-2013T (UGRD) Cloud Computing & Internet o TEDPSENPAINo ratings yet
- LogsDocument14 pagesLogsMaryln JampiNo ratings yet
- Internship Test - Endava Datamanagement DisciplineDocument4 pagesInternship Test - Endava Datamanagement DisciplineEcaterina IvavovaNo ratings yet
- SecurityFund PPT 1.1Document13 pagesSecurityFund PPT 1.1Fmunoz MunozNo ratings yet
- Representation of CNF and DNF by A Neural Net: PerceptronsDocument2 pagesRepresentation of CNF and DNF by A Neural Net: PerceptronsRaghunath SiripudiNo ratings yet
- ControlFile ManagementDocument3 pagesControlFile Managementsss pppNo ratings yet
- ManualDocument84 pagesManualLuis Henrique CarraraNo ratings yet
- Realtime Visual Recognition in Deep Convolutional Neural NetworksDocument13 pagesRealtime Visual Recognition in Deep Convolutional Neural NetworksICRDET 2019No ratings yet
- Indian Institute of Technology, KharagpurDocument2 pagesIndian Institute of Technology, KharagpurKaushal BanthiaNo ratings yet
- Middleware Administration - Weblogic MaterialDocument29 pagesMiddleware Administration - Weblogic MaterialIrfan AhmadNo ratings yet
- Solved P2 Feb March 2023Document16 pagesSolved P2 Feb March 2023GSNo ratings yet
- How To Create A QR Code For A Webpage Using ReactJS - by Kevin Uriel Fonseca - Sep, 2021 - MediumDocument1 pageHow To Create A QR Code For A Webpage Using ReactJS - by Kevin Uriel Fonseca - Sep, 2021 - MediumBleep NewsNo ratings yet
- Installing Aloha IN WIINDOWS 7Document5 pagesInstalling Aloha IN WIINDOWS 7rabeaNo ratings yet
- MalanDocument6 pagesMalanगोपाल शर्माNo ratings yet
- Fdocuments - in Chapter 1 Introduction Utoledo Wevanschap1spdfthe Machine Tool and AutomotiveDocument27 pagesFdocuments - in Chapter 1 Introduction Utoledo Wevanschap1spdfthe Machine Tool and AutomotiveFoo BrandonNo ratings yet
- Computer Studies Syllabus Forms 3-4Document40 pagesComputer Studies Syllabus Forms 3-4Malack ChagwaNo ratings yet
- RAC One Node - The "Always On" Single Instance DatabaseDocument25 pagesRAC One Node - The "Always On" Single Instance DatabaseThota Mahesh DbaNo ratings yet
- VLT MCT 10 Set-Up SoftwareDocument255 pagesVLT MCT 10 Set-Up SoftwareHafid AlifiantoNo ratings yet
- CWS 215 2I en LabManual M04 v01Document76 pagesCWS 215 2I en LabManual M04 v01Quaseem SiddiqiNo ratings yet
- Teradata ArchitectureDocument5 pagesTeradata ArchitectureAnand VaNo ratings yet
- Counters: Compiled By: Afaq Alam KhanDocument28 pagesCounters: Compiled By: Afaq Alam KhanRajeshwari SNo ratings yet
- Log-20200427 1221 1Document4 pagesLog-20200427 1221 1TOP 10No ratings yet
- Itproj - SRS1Document9 pagesItproj - SRS1John Paul BautistaNo ratings yet
- Ethical Hacking and Cyber Security - Day Wise Course ContentDocument3 pagesEthical Hacking and Cyber Security - Day Wise Course ContentAchyut AwasthiNo ratings yet
- Examples of Machine Language Instruction SetDocument10 pagesExamples of Machine Language Instruction Setعبدالرحيم اودينNo ratings yet
- SE Example - I-15 Graphical User Interface RequirementsDocument34 pagesSE Example - I-15 Graphical User Interface RequirementsManasi BhaveNo ratings yet
- (SurBook) (Official Version) Chuwi SurBook Windows, Driver, Bios Download - Download&Tutorial - CHUWI - Official ForumDocument7 pages(SurBook) (Official Version) Chuwi SurBook Windows, Driver, Bios Download - Download&Tutorial - CHUWI - Official ForumCgot GotcNo ratings yet
- System DesignDocument4 pagesSystem DesignMesele MohammedNo ratings yet
- Me31-Xaax0440 Network I/O Networking Module: Chengdu Ebyte Electronic Technology Co.,Ltd. Me31-Xaax0440 - Usermanul - enDocument31 pagesMe31-Xaax0440 Network I/O Networking Module: Chengdu Ebyte Electronic Technology Co.,Ltd. Me31-Xaax0440 - Usermanul - enMeng HourNo ratings yet