You might also like
- Last GpsDocument9 pagesLast GpsThinh HoangNo ratings yet
- LastDocument5 pagesLastThinh HoangNo ratings yet
- Web Last v4Document13 pagesWeb Last v4Thinh HoangNo ratings yet
- Code ExplainDocument4 pagesCode ExplainThinh HoangNo ratings yet
- WebDocument4 pagesWebThinh HoangNo ratings yet
- Ramping Move Same TimeDocument6 pagesRamping Move Same TimeThinh HoangNo ratings yet
- Ramp TestDocument4 pagesRamp TestThinh HoangNo ratings yet
- Test RampDocument7 pagesTest RampThinh HoangNo ratings yet
- Pca 9685Document2 pagesPca 9685Thinh HoangNo ratings yet
- Electronics 09 01277 v2Document19 pagesElectronics 09 01277 v2Thinh HoangNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mac Interval TreeDocument655 pagesMac Interval TreeStick ChiffonNo ratings yet
- LogDocument14 pagesLogpwettyzey 06No ratings yet
- Create AI Logos and Brand Kits InstantlyDocument8 pagesCreate AI Logos and Brand Kits Instantlyanzal5925No ratings yet
- 01-02-10 100baset CPU Conn Box Cable-02Document6 pages01-02-10 100baset CPU Conn Box Cable-02maverick11No ratings yet
- Arieso - GEO 6 1 1 Rel GuideDocument73 pagesArieso - GEO 6 1 1 Rel GuidemanuelNo ratings yet
- Sites para Download de FontsDocument2 pagesSites para Download de FontsMariana NevesNo ratings yet
- Feeder Protection RelayDocument16 pagesFeeder Protection RelaygealifeNo ratings yet
- CH 16 Wireless WANs - Cellular Telephone and Satellite Networks Multiple Choice Questions and Answers Data Communications and Networking PDFDocument11 pagesCH 16 Wireless WANs - Cellular Telephone and Satellite Networks Multiple Choice Questions and Answers Data Communications and Networking PDFGayle LokeshNo ratings yet
- I. Project Initiation Activities:: Diacenco Margareta, FAF-171 Ivanova Anastasia, FAF-172 Țurcanu Ana, FAF-171Document5 pagesI. Project Initiation Activities:: Diacenco Margareta, FAF-171 Ivanova Anastasia, FAF-172 Țurcanu Ana, FAF-171Anastasia WagnerNo ratings yet
- 'Lfioo: Paper IDocument16 pages'Lfioo: Paper Ipodobestmarak25No ratings yet
- P5G41T-M LX2 - P5G41T-M LX2/GB - P5G41T-M LX2/GB/LPTDocument40 pagesP5G41T-M LX2 - P5G41T-M LX2/GB - P5G41T-M LX2/GB/LPTΠαναγιωτα ΒNo ratings yet
- Assembling Computer: Presented By: Group 4 Reporters: Carlos Jade L. Pelina Mycel Patingo Nicholas Andrei SangcoDocument48 pagesAssembling Computer: Presented By: Group 4 Reporters: Carlos Jade L. Pelina Mycel Patingo Nicholas Andrei SangcoCeejaay PelinaNo ratings yet
- Saravanan. A.S: Phone: +91 6361506348Document8 pagesSaravanan. A.S: Phone: +91 6361506348saravanankonguNo ratings yet
- DSS-019 Digital Video DatasheetDocument10 pagesDSS-019 Digital Video DatasheetCoach-Julio CruzNo ratings yet
- Assignment TitleDocument4 pagesAssignment TitleIezma MadzinNo ratings yet
- Geit-20219 Dmsgoseries enDocument4 pagesGeit-20219 Dmsgoseries ensolrac4371No ratings yet
- Readme: Oracle® Hyperion PlanningDocument56 pagesReadme: Oracle® Hyperion PlanningsuchaiNo ratings yet
- Laporan BacktrackingDocument6 pagesLaporan BacktrackingryanNo ratings yet
- Buying Purchasing Hardware Software WorkstationDocument9 pagesBuying Purchasing Hardware Software WorkstationYadu Priya DeviNo ratings yet
- Mixidea Manual - 2Document29 pagesMixidea Manual - 2Ica AnnisaNo ratings yet
- TEJ - TEC - CET - Computer Repair EmphasisDocument118 pagesTEJ - TEC - CET - Computer Repair Emphasislourdes estopaciaNo ratings yet
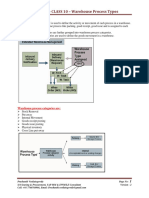
- EWM CLASS 10 - Warehouse Process TypesDocument9 pagesEWM CLASS 10 - Warehouse Process TypesRaviteja KanakaNo ratings yet
- Car Head Up Display c1 ManualDocument9 pagesCar Head Up Display c1 ManualDamodharaKannan RNo ratings yet
- Exam 20 April 2017 Questions and AnswersDocument10 pagesExam 20 April 2017 Questions and AnswersFayez EjelNo ratings yet
- Course Digital Marketing: Keyword Planner ToolsDocument10 pagesCourse Digital Marketing: Keyword Planner ToolsShu NiNo ratings yet
- Deploying SyncE IEEE1588v1 11 PDFDocument36 pagesDeploying SyncE IEEE1588v1 11 PDFVince CentenoNo ratings yet
- 112-07-005 Rev 1 - iSED Inter-Sample Carry Over Test ProtocolDocument4 pages112-07-005 Rev 1 - iSED Inter-Sample Carry Over Test ProtocolAmine CHAHIDNo ratings yet
- B660M DS3H DDR4 ManualDocument38 pagesB660M DS3H DDR4 ManualCharli Fermín Thompson MonNo ratings yet
- MirshaBalderas CV2022 PDocument2 pagesMirshaBalderas CV2022 PMirsha PérezNo ratings yet
- Scraping Instagram With PythonDocument4 pagesScraping Instagram With PythonSrujana TakkallapallyNo ratings yet