You might also like
- Software for PID Design Benefits and PitfallsDocument6 pagesSoftware for PID Design Benefits and PitfallsAleksandar MicicNo ratings yet
- Pseudo-PID Controller Design, Tuning and ApplicationsDocument6 pagesPseudo-PID Controller Design, Tuning and ApplicationsPaulo César RibeiroNo ratings yet
- Virtual Reference Feedback Tuning For Industrial PID ControllersDocument6 pagesVirtual Reference Feedback Tuning For Industrial PID ControllersRifka Annisa Girsang IINo ratings yet
- Applied Sciences: An Optimal Fuzzy PID Controller Design Based On Conventional PID Control and Nonlinear FactorsDocument18 pagesApplied Sciences: An Optimal Fuzzy PID Controller Design Based On Conventional PID Control and Nonlinear FactorsNourhan FathyNo ratings yet
- Smart Controller Design for Chemical Processes Using Genetic AlgorithmDocument8 pagesSmart Controller Design for Chemical Processes Using Genetic AlgorithmYogesh ChaudhariNo ratings yet
- N Adaptive PID Controller Based On Genetic Algorithm ProcessorDocument6 pagesN Adaptive PID Controller Based On Genetic Algorithm ProcessorEngr Nayyer Nayyab MalikNo ratings yet
- Comparison of Control System Using PLC & PIDDocument6 pagesComparison of Control System Using PLC & PIDhamidouhouNo ratings yet
- Tuning PID Controllers for Improved Process ControlDocument7 pagesTuning PID Controllers for Improved Process Controljesus david quintero fontalvoNo ratings yet
- Tuning PID and PI D Controllers Using The Integral Time Absolute Error CriterionDocument6 pagesTuning PID and PI D Controllers Using The Integral Time Absolute Error CriterionAleksandar MicicNo ratings yet
- Application of Improved PID Controller in Motor Drive SystemDocument19 pagesApplication of Improved PID Controller in Motor Drive SystemmahderNo ratings yet
- A. S. Silveira Et Al. - Pseudo PID Controler - Design, Tuning and ApplicationsDocument6 pagesA. S. Silveira Et Al. - Pseudo PID Controler - Design, Tuning and ApplicationsAndreza FerreiraNo ratings yet
- The Application of Adaptive PID Control in the Spray RobotDocument4 pagesThe Application of Adaptive PID Control in the Spray RobotAhmad ZezoNo ratings yet
- PID Controlled Synchronous Motor For Power Factor CorrectionDocument5 pagesPID Controlled Synchronous Motor For Power Factor CorrectionigoreliasNo ratings yet
- 6 CoppyDocument8 pages6 CoppyTri PhanNo ratings yet
- PID ReportDocument38 pagesPID ReportNishiya Vijayan100% (1)
- PID Controller Tuning Techniques ReviewedDocument9 pagesPID Controller Tuning Techniques ReviewedOscar Ruiz SerranoNo ratings yet
- An Embedded Controller For The PendubotDocument6 pagesAn Embedded Controller For The PendubotCarlos Alberto Cribillero VegaNo ratings yet
- FFFDocument24 pagesFFFEngr Nayyer Nayyab MalikNo ratings yet
- Robust PID Controller Design For Nonlinear Systems: Part IIDocument28 pagesRobust PID Controller Design For Nonlinear Systems: Part IIEngr Nayyer Nayyab MalikNo ratings yet
- Robust PID controller toolbox using convex optimizationDocument6 pagesRobust PID controller toolbox using convex optimizationAnonymous WkbmWCa8MNo ratings yet
- PID Tunning For Varying Time Delays SystemDocument8 pagesPID Tunning For Varying Time Delays SystemIMRANE NASSETNo ratings yet
- 2171103Document4 pages2171103narayanNo ratings yet
- Exact Tuning of PID ControllersDocument6 pagesExact Tuning of PID Controllersmazaher karamiNo ratings yet
- 15 - Performances Comparison of The Bees Algorithm and Genetic Algorithm For PID Controller TuningDocument5 pages15 - Performances Comparison of The Bees Algorithm and Genetic Algorithm For PID Controller Tuningahmed.almohammedNo ratings yet
- RTDA Final R PDFDocument33 pagesRTDA Final R PDFMourougapragash SubramanianNo ratings yet
- Design of A Data-Driven Controller For A Spiral Heat ExchangerDocument5 pagesDesign of A Data-Driven Controller For A Spiral Heat ExchangerSendrescu DorinNo ratings yet
- A Simple Robust PI/PID Controller Design Via Numerical Optimization ApproachDocument8 pagesA Simple Robust PI/PID Controller Design Via Numerical Optimization ApproachAleksandar MicicNo ratings yet
- Design and Simulation of PID Controller Using FPGADocument5 pagesDesign and Simulation of PID Controller Using FPGAIJSTENo ratings yet
- Design of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIDocument6 pagesDesign of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIRamaDinakaranNo ratings yet
- Tuning of PID Controllers With Fuzzy Logic: AbstractDocument8 pagesTuning of PID Controllers With Fuzzy Logic: Abstractjames100% (1)
- RMuniraj RRST 3 2019 PP 259-265Document7 pagesRMuniraj RRST 3 2019 PP 259-265Tarak BenslimaneNo ratings yet
- Bendjeghaba 2013Document4 pagesBendjeghaba 2013Rahmat FaisalNo ratings yet
- Genetic Algorithm 2Document7 pagesGenetic Algorithm 2nirmal_inboxNo ratings yet
- Helicopter Stabilization Using Integer and Fractional Order PID Controller Based On Genetic AlgorithmDocument12 pagesHelicopter Stabilization Using Integer and Fractional Order PID Controller Based On Genetic AlgorithmMohamed SakrNo ratings yet
- Intelligent Computation of Controller Using Optimisation Techniques For A Nonlinear Chemical ProcessDocument7 pagesIntelligent Computation of Controller Using Optimisation Techniques For A Nonlinear Chemical ProcessGlan DevadhasNo ratings yet
- A Rulebased Adaptive Pid ControllerDocument6 pagesA Rulebased Adaptive Pid ControllerJoseph JoseNo ratings yet
- Fractional Order PID Controller Tuning Based On IMCDocument15 pagesFractional Order PID Controller Tuning Based On IMCijitcajournalNo ratings yet
- Engineering Journal A Professional PID Implemented Using A Non-Singleton Type-1 Fuzzy Logic System To Control A Stepper MotorDocument8 pagesEngineering Journal A Professional PID Implemented Using A Non-Singleton Type-1 Fuzzy Logic System To Control A Stepper MotorEngineering JournalNo ratings yet
- CDC 2005 1583310Document6 pagesCDC 2005 1583310SowrirajanNo ratings yet
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicNo ratings yet
- Design and Implementation of Real Time IntegerDocument6 pagesDesign and Implementation of Real Time Integerडाँ सूर्यदेव चौधरीNo ratings yet
- Optimal Tuning of Fractional Order PI D Controllers Using Genetic AlgorithmsDocument6 pagesOptimal Tuning of Fractional Order PI D Controllers Using Genetic AlgorithmsabdieljosadacNo ratings yet
- Fopid With GADocument4 pagesFopid With GAAl-momaniMohammadNo ratings yet
- Controller DesignDocument253 pagesController DesignymvbnNo ratings yet
- Design PID Controller PLCDocument8 pagesDesign PID Controller PLCankit407No ratings yet
- 2015-Adaptive Multi-Loop Fractional Order PID - USBDocument8 pages2015-Adaptive Multi-Loop Fractional Order PID - USBAravindan MohanNo ratings yet
- DLSU ResCon 2016 Paper 71Document6 pagesDLSU ResCon 2016 Paper 71Ralph Laurence G VisayaNo ratings yet
- Decentralized and Fixed-Structure H Control in MATLAB PDFDocument6 pagesDecentralized and Fixed-Structure H Control in MATLAB PDFMohammad SadiqNo ratings yet
- Study of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingDocument4 pagesStudy of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingMadhusmita BeheraNo ratings yet
- HjgjhgfytrtyDocument7 pagesHjgjhgfytrtyMohamed Ahmed Farouk Elsayed RadyNo ratings yet
- A Simple PID Controller With Adaptive Parameter in A DsPICDocument5 pagesA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifNo ratings yet
- A Microcontroller Implementation of Fractional Order ControllerDocument6 pagesA Microcontroller Implementation of Fractional Order ControllerPraveen MathiasNo ratings yet
- An Arduino Based Pid Fuzzy Controller Fo PDFDocument7 pagesAn Arduino Based Pid Fuzzy Controller Fo PDFrouf johnNo ratings yet
- Design and Development of Fuzzy Logic Algorithm With Varying Setpoints For Fan Speed Control System Using Arduino Microcontroller (IEEE) - CDODocument6 pagesDesign and Development of Fuzzy Logic Algorithm With Varying Setpoints For Fan Speed Control System Using Arduino Microcontroller (IEEE) - CDORalph Laurence Garcia Visaya100% (1)
- 1trtr67017390705 MainDocument6 pages1trtr67017390705 MainkalyanNo ratings yet
- DES and Industrial AutomationDocument26 pagesDES and Industrial AutomationVăn Nghĩa NguyễnNo ratings yet
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- FM Using PLL CompressDocument8 pagesFM Using PLL CompressKARKAR NORANo ratings yet
- FM Using PLL CompressDocument8 pagesFM Using PLL CompressKARKAR NORANo ratings yet
- Analogcommunication Labmanual PDFDocument69 pagesAnalogcommunication Labmanual PDFdonyarmstrongNo ratings yet
- Pulse Amplitude Modulation and Demodulation - Google SearchDocument30 pagesPulse Amplitude Modulation and Demodulation - Google SearchHasan SkNo ratings yet
- Mp-Correction Des SaDocument23 pagesMp-Correction Des SaHichem HamdiNo ratings yet
- Analogcommunication Labmanual PDFDocument69 pagesAnalogcommunication Labmanual PDFdonyarmstrongNo ratings yet
- I I Min 0 0 MinDocument4 pagesI I Min 0 0 MinKARKAR NORANo ratings yet
- Pan Tilt Multi Servo ControlDocument14 pagesPan Tilt Multi Servo ControlKARKAR NORANo ratings yet
- Solutions TD Auto 3A 2023Document24 pagesSolutions TD Auto 3A 2023KARKAR NORANo ratings yet
- MATLAB & Simulink For Digital CommunicationDocument115 pagesMATLAB & Simulink For Digital CommunicationKy Phan40% (5)
- Iterative Learning Control (ILC) : Bo Bernhardsson and Karl Johan ÅströmDocument46 pagesIterative Learning Control (ILC) : Bo Bernhardsson and Karl Johan ÅströmKARKAR NORANo ratings yet
- SCHMIDHUBER.2015 - Deep Learning in Neural Networks. An OverviewDocument33 pagesSCHMIDHUBER.2015 - Deep Learning in Neural Networks. An OverviewAnonymous PsEz5kGVaeNo ratings yet
- A Parallel Genetic Approach To The Gate Sizing Problem of Vlsi IDocument5 pagesA Parallel Genetic Approach To The Gate Sizing Problem of Vlsi IKARKAR NORANo ratings yet
- Spreadsheets, SQL, and R: A ComparisonDocument2 pagesSpreadsheets, SQL, and R: A ComparisonKARKAR NORANo ratings yet
- NORLOFDocument16 pagesNORLOFKARKAR NORANo ratings yet
- Implementation of PID Controller Using PSO and Harmony Search Algorithm For DC Motor Speed Control SystemDocument24 pagesImplementation of PID Controller Using PSO and Harmony Search Algorithm For DC Motor Speed Control SystemKARKAR NORANo ratings yet
- Tuning of Pid Controller by Bioinspired Techniques: Bachelor of Technology in Electronics and Instrumentation EngineeringDocument41 pagesTuning of Pid Controller by Bioinspired Techniques: Bachelor of Technology in Electronics and Instrumentation EngineeringOmarHanifNo ratings yet
- Ilc Intro Pdftex03 03Document59 pagesIlc Intro Pdftex03 03KARKAR NORANo ratings yet
- A PSO Method With Nonlinear Time-Varying Evolution For OptimDocument4 pagesA PSO Method With Nonlinear Time-Varying Evolution For OptimKARKAR NORANo ratings yet
- B.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationDocument632 pagesB.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationKaren Franke75% (4)
- Blinks LEDsDocument2 pagesBlinks LEDsKARKAR NORANo ratings yet
- Pillay 2008Document207 pagesPillay 2008smprabu24317No ratings yet
- Chien 2008Document9 pagesChien 2008KARKAR NORANo ratings yet
- Yu 2011Document7 pagesYu 2011KARKAR NORANo ratings yet
- Application of MATLAB in Process Control: Case Study For First Order Reaction in A CSTRDocument5 pagesApplication of MATLAB in Process Control: Case Study For First Order Reaction in A CSTRKARKAR NORANo ratings yet
- Chaos Control - Theory and Applications PDFDocument343 pagesChaos Control - Theory and Applications PDFKARKAR NORANo ratings yet
- B.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationDocument632 pagesB.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationKaren Franke75% (4)
- Shen2019 PDFDocument8 pagesShen2019 PDFKARKAR NORANo ratings yet
- On Controlling pH LevelsDocument5 pagesOn Controlling pH LevelsKARKAR NORANo ratings yet
- Manual-TCP Attack LabDocument9 pagesManual-TCP Attack LabZaoui OumaimaNo ratings yet
- N16S-GT Package 23x23mm Technical SpecificationsDocument49 pagesN16S-GT Package 23x23mm Technical Specificationsvi aNo ratings yet
- BMIT2164 T1 Switching ConceptDocument4 pagesBMIT2164 T1 Switching Conceptterence yapNo ratings yet
- Touch-Screen Network Control UI GuideDocument13 pagesTouch-Screen Network Control UI GuideEduardo PerezNo ratings yet
- Network Engineer Study PlanDocument10 pagesNetwork Engineer Study PlanerickpandangNo ratings yet
- Project REPORT PART-1Document46 pagesProject REPORT PART-1AdityaNo ratings yet
- Technical ManualDocument15 pagesTechnical ManualShree GanapatiNo ratings yet
- Chapter 3: Advanced Computer Hardware: Instructor MaterialsDocument62 pagesChapter 3: Advanced Computer Hardware: Instructor MaterialsCabdixakim Xuseen UrugNo ratings yet
- Multithreaded Architectures: Lecture 5: Performance ConsiderationsDocument49 pagesMultithreaded Architectures: Lecture 5: Performance ConsiderationsYAAKOV SOLOMONNo ratings yet
- History of Computing Hardware - WikipediaDocument11 pagesHistory of Computing Hardware - WikipediaFuckNo ratings yet
- Lesson Plan - Internet of Things - Docx-1709033060448Document6 pagesLesson Plan - Internet of Things - Docx-1709033060448Riddhi GhogareNo ratings yet
- Cs304 Oop Notes by SonuDocument39 pagesCs304 Oop Notes by Sonuabrar mustafaNo ratings yet
- Assignment Management System in 40 CharactersDocument45 pagesAssignment Management System in 40 CharactersNitesh JadhavNo ratings yet
- Mathematical Logic in Computer Science - Assaf KfouryDocument27 pagesMathematical Logic in Computer Science - Assaf Kfouryvic1234059No ratings yet
- Openedge Abl Use JsonDocument50 pagesOpenedge Abl Use JsonLucas BicalhoNo ratings yet
- Theory of AutomataDocument34 pagesTheory of AutomataFatimaNo ratings yet
- Caterpillar Cat Webpgi RM500Document23 pagesCaterpillar Cat Webpgi RM500Hendra Mechanic100% (1)
- OBTD EngUrpDocument74 pagesOBTD EngUrpRakibul HassanNo ratings yet
- Exadata 19.3.11.0.0 Release and Patch (31724174) (Doc ID 2686927.1)Document2 pagesExadata 19.3.11.0.0 Release and Patch (31724174) (Doc ID 2686927.1)Ganesh JNo ratings yet
- Azure Active Directory - Grant Service Principal Access To Application in Other Tenant - Stack OverflowDocument4 pagesAzure Active Directory - Grant Service Principal Access To Application in Other Tenant - Stack OverflowybNo ratings yet
- CypCutPro User Manual V7.0Document70 pagesCypCutPro User Manual V7.0a.osama.tronixNo ratings yet
- Virtual Reference Design From ROHMDocument33 pagesVirtual Reference Design From ROHMToni TursićNo ratings yet
- Dell OptiPlex 5050 SFF vs 7040 SFF Desktop ComparisonDocument4 pagesDell OptiPlex 5050 SFF vs 7040 SFF Desktop ComparisondharmagyanNo ratings yet
- English - Bounce Wireless HeadphonesDocument8 pagesEnglish - Bounce Wireless HeadphonesIlse PereiraNo ratings yet
- Software TestingDocument6 pagesSoftware TestingHaya NaazNo ratings yet
- Chapter Iii: Physical LayerDocument8 pagesChapter Iii: Physical LayerEcho greenNo ratings yet
- IT Professional With BE (ECE), CCNA Certified With 4 Years 11 Months of Hands-On Experience in Network AdministrationDocument3 pagesIT Professional With BE (ECE), CCNA Certified With 4 Years 11 Months of Hands-On Experience in Network Administrationshobhit BanerjeeNo ratings yet
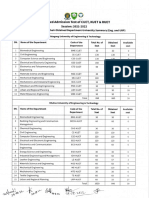
- OU-BCA Scheme of Instruction and Syllabi 2020-2021Document27 pagesOU-BCA Scheme of Instruction and Syllabi 2020-2021Santosh PallaNo ratings yet
- Control Engineering Magazine May 2021 1621425288Document54 pagesControl Engineering Magazine May 2021 1621425288JACK_LIVENo ratings yet
- Hef 4516 BTDocument10 pagesHef 4516 BTAdam SchwemleinNo ratings yet