You might also like
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Tutorial Sol CH 9Document11 pagesTutorial Sol CH 9Sameer BitthariaNo ratings yet
- Batch CSTR ExperimentDocument5 pagesBatch CSTR ExperimentNaeem YounisNo ratings yet
- Control of A Nonlinear Continuous Stirred Tank Reactor Via Event Triggered Sliding ModesDocument22 pagesControl of A Nonlinear Continuous Stirred Tank Reactor Via Event Triggered Sliding ModesFaizhal DimazNo ratings yet
- 55-603480 RD (R) Exam - Off-Campus - 2021-22-r1Document8 pages55-603480 RD (R) Exam - Off-Campus - 2021-22-r1EMILY BLANDFORDNo ratings yet
- UNIT-3: Department of Chemical Engineering Sathyabama UniversityDocument16 pagesUNIT-3: Department of Chemical Engineering Sathyabama UniversityBT20CME033 Gautam TahilyaniNo ratings yet
- Chapter 2 Rate Data AnalysisDocument57 pagesChapter 2 Rate Data AnalysisSINH NGUYỄN HỮUNo ratings yet
- Optimal Control of CSTR: Kalpesh Pathak, Anil Markana and Nishant ParikhDocument4 pagesOptimal Control of CSTR: Kalpesh Pathak, Anil Markana and Nishant ParikhGilbert GospelNo ratings yet
- Nonlinear Predictive Control of A Benchmark CSTRDocument6 pagesNonlinear Predictive Control of A Benchmark CSTRRohan LakhaniNo ratings yet
- Efectosde Los Harmonicos en MPPT 2016Document8 pagesEfectosde Los Harmonicos en MPPT 2016Taborda ErickNo ratings yet
- Conversion FouglrDocument21 pagesConversion Fouglrحسام العسلNo ratings yet
- Model Predictive Control For DC-DC Boost Converters With Constant Switching FrequencyDocument6 pagesModel Predictive Control For DC-DC Boost Converters With Constant Switching FrequencyChaudhry Fahad Ali FastNUNo ratings yet
- Control of WecsDocument5 pagesControl of WecsKhaja SameeduddinNo ratings yet
- CEB2043 - Reaction Engineering I - Ch00 Introduction PDFDocument27 pagesCEB2043 - Reaction Engineering I - Ch00 Introduction PDFScorpion RoyalNo ratings yet
- Chapter 10Document20 pagesChapter 10Dilip Singh ChoudharyNo ratings yet
- Erlich 2011 ADocument7 pagesErlich 2011 AsubasratnaNo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- Analysis of Temperature Control of CSTR Using S FunctionDocument4 pagesAnalysis of Temperature Control of CSTR Using S FunctionSolecito FuentesNo ratings yet
- Batch CSTR ExperimentDocument5 pagesBatch CSTR ExperimentDyako D TaherNo ratings yet
- BT2353 NolDocument69 pagesBT2353 NolHari Priya0% (1)
- Batch ReactorDocument12 pagesBatch ReactorShashi RaajNo ratings yet
- A Practical Integration of Automatic Generation Control and Demand ResponseDocument6 pagesA Practical Integration of Automatic Generation Control and Demand ResponseDaniel JesusiNo ratings yet
- Dynamics and Control of Recycle Systems. 2. Comparison Alternative Process DesignsDocument11 pagesDynamics and Control of Recycle Systems. 2. Comparison Alternative Process DesignsJean Pierre León BravoNo ratings yet
- Mathematical Modeling of Two Tank System Ijariie4840Document8 pagesMathematical Modeling of Two Tank System Ijariie4840Abeng YogtaNo ratings yet
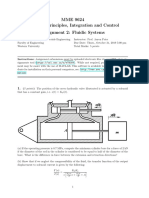
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 pagesMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelNo ratings yet
- Modeling of Wind Energy System With MPPTDocument6 pagesModeling of Wind Energy System With MPPTsbv1986No ratings yet
- Report With ConclusionDocument30 pagesReport With ConclusionAhmed YounisNo ratings yet
- 10 23919@acc 2018 8430834Document6 pages10 23919@acc 2018 8430834mda mpsNo ratings yet
- Nonlinear Predictive Control of A Benchmark CSTRDocument7 pagesNonlinear Predictive Control of A Benchmark CSTRYuri Zopelario MareliNo ratings yet
- International Journal of Chemical Reactor Engineering: Srinivas Palanki Jyothy VemuriDocument23 pagesInternational Journal of Chemical Reactor Engineering: Srinivas Palanki Jyothy Vemuriali alasdyNo ratings yet
- Chemical Engineering KineticsDocument45 pagesChemical Engineering KineticsMelissa Marie DimaculanganNo ratings yet
- Assignment 4Document5 pagesAssignment 4Yi Hong LowNo ratings yet
- CHEE 321: Chemical Reaction Engineering: Module 3: Isothermal Reactor DesignDocument16 pagesCHEE 321: Chemical Reaction Engineering: Module 3: Isothermal Reactor DesignPranav NakhateNo ratings yet
- A Grid-Compatible Virtual Oscillator Controller Analysis and DesignDocument7 pagesA Grid-Compatible Virtual Oscillator Controller Analysis and DesignAdnan KutsiNo ratings yet
- Dynamic Model of Non-Interacting Isothermal CSTRDocument39 pagesDynamic Model of Non-Interacting Isothermal CSTRanita busilan100% (1)
- Speed Control of DC Motor Using PID Controller For Industrial ApplicationDocument4 pagesSpeed Control of DC Motor Using PID Controller For Industrial ApplicationEditor IJTSRDNo ratings yet
- (Ebook) Multivariable Control, An Introduction PDFDocument14 pages(Ebook) Multivariable Control, An Introduction PDFCaterine Feria RamirezNo ratings yet
- Application of Simple Adaptive Control To A DC DC Boost Converter With Load Variation Iccas-Sice09 GoojongDocument6 pagesApplication of Simple Adaptive Control To A DC DC Boost Converter With Load Variation Iccas-Sice09 GoojongAMIR SOHAILNo ratings yet
- CSTRDocument15 pagesCSTRVismar Campos HernándezNo ratings yet
- Heuristic Design of Reaction/Separation ProcessesDocument8 pagesHeuristic Design of Reaction/Separation ProcessesAndrea VittoNo ratings yet
- Problem Set 3Document5 pagesProblem Set 3Adekoya IfeoluwaNo ratings yet
- A Heuristic Approach For The Economic Optimization of A Series of CSTR's Performing Michaelis-Menten ReactionsDocument5 pagesA Heuristic Approach For The Economic Optimization of A Series of CSTR's Performing Michaelis-Menten Reactionsראול אפונטהNo ratings yet
- Cpo ReportDocument20 pagesCpo ReportSyeda Khaliqa HamidNo ratings yet
- 117 GQ 052018Document3 pages117 GQ 052018Bala Raju ReddyboyaNo ratings yet
- Hydrocracking ModelDocument6 pagesHydrocracking Modelantzlck100% (1)
- 6 Process Modeling Equations: Kpe τ ps +1 Kpe τ S+1 θ τDocument5 pages6 Process Modeling Equations: Kpe τ ps +1 Kpe τ S+1 θ τGarabigNo ratings yet
- Problem Set 5Document6 pagesProblem Set 5PeaceNo ratings yet
- Lec 32Document19 pagesLec 32arjun SinghNo ratings yet
- A Power Electronics and Digital Control PDFDocument7 pagesA Power Electronics and Digital Control PDFAnonymous nZo3uhY8uRNo ratings yet
- Nasaba J.C, Lecture Notes On Chemical Reaction Engineering, Chapter I: Chemical Reaction KineticsDocument29 pagesNasaba J.C, Lecture Notes On Chemical Reaction Engineering, Chapter I: Chemical Reaction Kineticskivumbi AchileoNo ratings yet
- Ugpa3033 Process Optimization and Simulation Tutorial 4Document1 pageUgpa3033 Process Optimization and Simulation Tutorial 4Tko Kai OnnNo ratings yet
- Multivariable Optimal Control of An Industrial Nonlinear Boiler Turbine UnitDocument17 pagesMultivariable Optimal Control of An Industrial Nonlinear Boiler Turbine UnitAliAlMisbahNo ratings yet
- Lecture 1Document22 pagesLecture 1rashaNo ratings yet
- Performance Analysis of FC-TCR: Abstract:-This Paper Deals With Open Loop Study of FixedDocument3 pagesPerformance Analysis of FC-TCR: Abstract:-This Paper Deals With Open Loop Study of FixedDP Technical ClassesNo ratings yet
- fcc1 PDFDocument7 pagesfcc1 PDFAnonymous jlLBRMAr3ONo ratings yet
- Numerical Simulation On Pump As Turbine Mesh Reliability and Performance ConcernsDocument6 pagesNumerical Simulation On Pump As Turbine Mesh Reliability and Performance ConcernsDaniel Santacruz LNo ratings yet
- Isothermal Reactor DesignDocument54 pagesIsothermal Reactor DesignMark Antony LevineNo ratings yet
- Lec 31Document27 pagesLec 31arjun SinghNo ratings yet
- Fall 2019 Che 461 Process Dynamics and Control Computer Modeling Assignment No. 2: Diabatic Continuous Stirred Tank Reactor SimulationDocument5 pagesFall 2019 Che 461 Process Dynamics and Control Computer Modeling Assignment No. 2: Diabatic Continuous Stirred Tank Reactor SimulationRenzo Jose Canro CalderonNo ratings yet
- Pulse Amplitude Modulation and Demodulation - Google SearchDocument30 pagesPulse Amplitude Modulation and Demodulation - Google SearchHasan SkNo ratings yet
- Mp-Correction Des SaDocument23 pagesMp-Correction Des SaHichem HamdiNo ratings yet
- Solutions TD Auto 3A 2023Document24 pagesSolutions TD Auto 3A 2023KARKAR NORANo ratings yet
- Analogcommunication Labmanual PDFDocument69 pagesAnalogcommunication Labmanual PDFdonyarmstrongNo ratings yet
- FM Using PLL CompressDocument8 pagesFM Using PLL CompressKARKAR NORANo ratings yet
- FM Using PLL CompressDocument8 pagesFM Using PLL CompressKARKAR NORANo ratings yet
- Analogcommunication Labmanual PDFDocument69 pagesAnalogcommunication Labmanual PDFdonyarmstrongNo ratings yet
- Spreadsheets, SQL, and R: A ComparisonDocument2 pagesSpreadsheets, SQL, and R: A ComparisonKARKAR NORANo ratings yet
- SCHMIDHUBER.2015 - Deep Learning in Neural Networks. An OverviewDocument33 pagesSCHMIDHUBER.2015 - Deep Learning in Neural Networks. An OverviewAnonymous PsEz5kGVaeNo ratings yet
- MATLAB & Simulink For Digital CommunicationDocument115 pagesMATLAB & Simulink For Digital CommunicationKy Phan40% (5)
- I I Min 0 0 MinDocument4 pagesI I Min 0 0 MinKARKAR NORANo ratings yet
- Iterative Learning Control (ILC) : Bo Bernhardsson and Karl Johan ÅströmDocument46 pagesIterative Learning Control (ILC) : Bo Bernhardsson and Karl Johan ÅströmKARKAR NORANo ratings yet
- Pan Tilt Multi Servo ControlDocument14 pagesPan Tilt Multi Servo ControlKARKAR NORANo ratings yet
- Ilc Intro Pdftex03 03Document59 pagesIlc Intro Pdftex03 03KARKAR NORANo ratings yet
- NORLOFDocument16 pagesNORLOFKARKAR NORANo ratings yet
- B.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationDocument632 pagesB.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationKaren Franke75% (4)
- Blinks LEDsDocument2 pagesBlinks LEDsKARKAR NORANo ratings yet
- A PSO Method With Nonlinear Time-Varying Evolution For OptimDocument4 pagesA PSO Method With Nonlinear Time-Varying Evolution For OptimKARKAR NORANo ratings yet
- A Parallel Genetic Approach To The Gate Sizing Problem of Vlsi IDocument5 pagesA Parallel Genetic Approach To The Gate Sizing Problem of Vlsi IKARKAR NORANo ratings yet
- Implementation of PID Controller Using PSO and Harmony Search Algorithm For DC Motor Speed Control SystemDocument24 pagesImplementation of PID Controller Using PSO and Harmony Search Algorithm For DC Motor Speed Control SystemKARKAR NORANo ratings yet
- Optimpid: A Matlab Interface For Optimum Pid Controller DesignDocument6 pagesOptimpid: A Matlab Interface For Optimum Pid Controller DesignKARKAR NORANo ratings yet
- B.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationDocument632 pagesB.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationKaren Franke75% (4)
- Pillay 2008Document207 pagesPillay 2008smprabu24317No ratings yet
- Chien 2008Document9 pagesChien 2008KARKAR NORANo ratings yet
- Yu 2011Document7 pagesYu 2011KARKAR NORANo ratings yet
- Tuning of Pid Controller by Bioinspired Techniques: Bachelor of Technology in Electronics and Instrumentation EngineeringDocument41 pagesTuning of Pid Controller by Bioinspired Techniques: Bachelor of Technology in Electronics and Instrumentation EngineeringOmarHanifNo ratings yet
- Shen2019 PDFDocument8 pagesShen2019 PDFKARKAR NORANo ratings yet
- Chaos Control - Theory and Applications PDFDocument343 pagesChaos Control - Theory and Applications PDFKARKAR NORANo ratings yet
- On Controlling PHDocument5 pagesOn Controlling PHKARKAR NORANo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- Programming of HC900 Controller Based Speed Control System For D.C. MotorDocument8 pagesProgramming of HC900 Controller Based Speed Control System For D.C. MotorBrijesh SrivastavNo ratings yet
- Modul Push 15A enDocument6 pagesModul Push 15A enUPOTERMNo ratings yet
- BHT - Innova m5 PhonixDocument7 pagesBHT - Innova m5 PhonixNuno Freitas BastosNo ratings yet
- Electro-Hydraulic Actuator: Technical InformationDocument12 pagesElectro-Hydraulic Actuator: Technical InformationFelipe Doria RibeiroNo ratings yet
- HP - LP Bypass and Aprds SystemDocument47 pagesHP - LP Bypass and Aprds SystemSanjay Dadel100% (4)
- 22.hvac Controls - InvensysDocument62 pages22.hvac Controls - Invensysmeeng2014No ratings yet
- Chapter 10 - Data ManipulationDocument42 pagesChapter 10 - Data ManipulationAnonymous u1vBHM69No ratings yet
- B.Tech. Project Progress Report: Progres Presentation For Final ProjectDocument20 pagesB.Tech. Project Progress Report: Progres Presentation For Final ProjectSolomon MebrahtuNo ratings yet
- Field InstrumentationDocument85 pagesField InstrumentationSavana Prasanth100% (3)
- 1502 0068 en MORIS IgnitionDocument31 pages1502 0068 en MORIS Ignitionpalash1186% (22)
- GreenhousesDocument2 pagesGreenhousesZagdsuren AsNo ratings yet
- CO - Instrumentation & Control MIT, MANIPALDocument16 pagesCO - Instrumentation & Control MIT, MANIPALashley correaNo ratings yet
- ParaDyne Brochure Technical Bulletin 20011-1Document6 pagesParaDyne Brochure Technical Bulletin 20011-1Raghav vashistgNo ratings yet
- MATLAB HardwareDocument1 pageMATLAB HardwareImran KhanNo ratings yet
- Twentieth Century Developments On Control SystemsDocument6 pagesTwentieth Century Developments On Control SystemsIncohatusFormlessNo ratings yet
- Turbine & Auxiliaries Maintenance Manual Qn1 Sec G 04 TP 010Document142 pagesTurbine & Auxiliaries Maintenance Manual Qn1 Sec G 04 TP 010Bui VanluongNo ratings yet
- PID ControlDocument32 pagesPID Controlanurag_pai_1No ratings yet
- Introduction To Sensors PDFDocument40 pagesIntroduction To Sensors PDFPardha Saradhi Damarla100% (1)
- Ash Handling System Operetaion and Maintenance InstructionDocument162 pagesAsh Handling System Operetaion and Maintenance InstructionHari PrasadNo ratings yet
- Discrete Time Systems Discrete Time Systems & Difference EquationsDocument44 pagesDiscrete Time Systems Discrete Time Systems & Difference EquationsRonald George100% (1)
- Decs 250Document12 pagesDecs 250Paulo LeiteNo ratings yet
- ME 530 Project Report 42F152F14Document12 pagesME 530 Project Report 42F152F14Anonymous JhK8arNo ratings yet
- 2013 - S2E Technical and Technological - Intro - Final PDFDocument28 pages2013 - S2E Technical and Technological - Intro - Final PDFJose Kirby100% (1)
- Jawaharlal Nehru Technological University II Year B.Tech. ECE. Il-Sem T P 0 C Control SystemsDocument1 pageJawaharlal Nehru Technological University II Year B.Tech. ECE. Il-Sem T P 0 C Control SystemsappuamreddyNo ratings yet
- FPGA Implementation of A Smart Home LightingDocument2 pagesFPGA Implementation of A Smart Home LightingSelamiNo ratings yet
- Altitude Control of A Quadcopter: June 2015Document66 pagesAltitude Control of A Quadcopter: June 2015Shreya KowadkarNo ratings yet
- Control Loop Response To Setpoint Change With PID ControlDocument3 pagesControl Loop Response To Setpoint Change With PID ControlwenoNo ratings yet
- Fuzzy Logic Controller DesignDocument46 pagesFuzzy Logic Controller Designcleiton_ctbaNo ratings yet
- Cluster 3: Case Note Superheroes LLPDocument5 pagesCluster 3: Case Note Superheroes LLPpatrik stenbergNo ratings yet