You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5808)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Tecnai 20 G2 Pre-InstallationDocument85 pagesTecnai 20 G2 Pre-InstallationMichele GiannattasioNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Odisha Public Service Commission: SL No Subject No of Vacancies No of Posts Reserved For S.T. S.C. Sebc U.RDocument82 pagesOdisha Public Service Commission: SL No Subject No of Vacancies No of Posts Reserved For S.T. S.C. Sebc U.RPradyumna Keshari NahakNo ratings yet
- Calendar 2021Document1 pageCalendar 2021Pradyumna Keshari NahakNo ratings yet
- Bed Exam Result July 2015Document12 pagesBed Exam Result July 2015Pradyumna Keshari NahakNo ratings yet
- Asst. Professor CorrigendumDocument1 pageAsst. Professor CorrigendumPradyumna Keshari NahakNo ratings yet
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 pageMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEPradyumna Keshari NahakNo ratings yet
- P.G. Department of Botany, Berhampur University, Bhanja Bihar, Berhampur-760007Document8 pagesP.G. Department of Botany, Berhampur University, Bhanja Bihar, Berhampur-760007Pradyumna Keshari NahakNo ratings yet
- Rac 0 PDFDocument2 pagesRac 0 PDFPradyumna Keshari NahakNo ratings yet
- Payment ReceiptDocument1 pagePayment ReceiptPradyumna Keshari NahakNo ratings yet
- Central University of Orissa: Koraput Provisional Merit ListDocument3 pagesCentral University of Orissa: Koraput Provisional Merit ListPradyumna Keshari NahakNo ratings yet
- Answer Key Marks PDFDocument693 pagesAnswer Key Marks PDFPradyumna Keshari NahakNo ratings yet
- Faster Stronger Higher: An Introduction To: Fitness Principles and TestingDocument17 pagesFaster Stronger Higher: An Introduction To: Fitness Principles and TestingPradyumna Keshari NahakNo ratings yet
- Indian Institute of Technology Delhi: M.TechDocument2 pagesIndian Institute of Technology Delhi: M.TechPradyumna Keshari NahakNo ratings yet
- Turbomachinery Aerodynamics Prof. Bhaskar Roy Prof. A M Pradeep Department of Aerospace Engineering Indian Institute of Technology, BombayDocument29 pagesTurbomachinery Aerodynamics Prof. Bhaskar Roy Prof. A M Pradeep Department of Aerospace Engineering Indian Institute of Technology, BombayPradyumna Keshari NahakNo ratings yet
- Waterpumps WPDocument25 pagesWaterpumps WPPradyumna Keshari NahakNo ratings yet
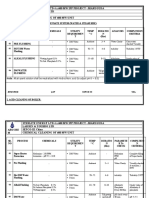
- NO. OF POSTS: 06 (Approx) : Bharat Electronics Limited (A Govt. of India Enterprise Under The Ministry of Defence)Document4 pagesNO. OF POSTS: 06 (Approx) : Bharat Electronics Limited (A Govt. of India Enterprise Under The Ministry of Defence)Pradyumna Keshari NahakNo ratings yet
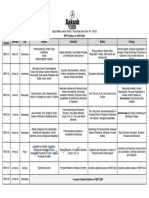
- NPTI Manuals: Price List of NPTI PublicationsDocument5 pagesNPTI Manuals: Price List of NPTI PublicationsPradyumna Keshari NahakNo ratings yet
- How To Make Your Own One-Way MirrorDocument7 pagesHow To Make Your Own One-Way MirrorilhamNo ratings yet
- Clinical Chemistry 1 (MKEB2404)Document5 pagesClinical Chemistry 1 (MKEB2404)kiedd_04100% (2)
- Unidad II Micro PDFDocument71 pagesUnidad II Micro PDFAlfredo RodriguezNo ratings yet
- Ficha Tecnica Sensor de NivelDocument6 pagesFicha Tecnica Sensor de NivelFernando VargasNo ratings yet
- Lab 1Document7 pagesLab 1attiqueNo ratings yet
- Research For Biology IaDocument7 pagesResearch For Biology IaKayleen PerdanaNo ratings yet
- Bs-En 1993-1-9 - 2005Document35 pagesBs-En 1993-1-9 - 2005Martijn OttenNo ratings yet
- ASTM Bulk DensityDocument8 pagesASTM Bulk DensitySugeng Hendik PurwantoNo ratings yet
- Nuclear Reactions, Transmutations, Fission and FusionDocument20 pagesNuclear Reactions, Transmutations, Fission and Fusionalistair100% (1)
- Syllabus of NCERT Booster Test Series CoE NEET-2024Document1 pageSyllabus of NCERT Booster Test Series CoE NEET-2024vj jNo ratings yet
- Cosmology Questions and Answers - SanfoundryDocument9 pagesCosmology Questions and Answers - SanfoundryGopinathan MNo ratings yet
- Research On Concentration UnitsDocument4 pagesResearch On Concentration UnitsCherry A. BallesterosNo ratings yet
- Leakfinder Wv622nvwkitDocument20 pagesLeakfinder Wv622nvwkitPaul ZiddyNo ratings yet
- Dupont Kapton: Summary of PropertiesDocument20 pagesDupont Kapton: Summary of PropertiesBryanda RoNo ratings yet
- Exxsol D60Document10 pagesExxsol D60Adi WiraNo ratings yet
- Introduction: The Instrument - I: Transmission Electron MicrosDocument12 pagesIntroduction: The Instrument - I: Transmission Electron MicrosEdward PinedaNo ratings yet
- Inner Planets 84-91Document8 pagesInner Planets 84-91RazzelmireNo ratings yet
- Journal Pre-Proofs: Materials LettersDocument10 pagesJournal Pre-Proofs: Materials LettersJefferson Andres Gonzales MontealegreNo ratings yet
- WP EN Thermoforming With 3D Printed Molds Quick Start GuideDocument4 pagesWP EN Thermoforming With 3D Printed Molds Quick Start GuideZakaria BenyounessNo ratings yet
- Gravimetric Analysis: Dr. Retno Ariadi Lusiana, M.Si Semarang, Indonesia - Sabah, MalaysiaDocument31 pagesGravimetric Analysis: Dr. Retno Ariadi Lusiana, M.Si Semarang, Indonesia - Sabah, MalaysiaMuhdLuqmanNo ratings yet
- Pi Class PDF - Electromagnetic InductionDocument67 pagesPi Class PDF - Electromagnetic InductionrbvzpgvqhbNo ratings yet
- Aru 302Document34 pagesAru 302Michael PachecoNo ratings yet
- Johnson 1989Document6 pagesJohnson 1989giulioNo ratings yet
- Sensors: A Review On Biosensors and Recent Development of Nanostructured Materials-Enabled BiosensorsDocument35 pagesSensors: A Review On Biosensors and Recent Development of Nanostructured Materials-Enabled Biosensorsalemu yadessaNo ratings yet
- Azoic Dyes: Presented By: Jayanthi SelvarajDocument13 pagesAzoic Dyes: Presented By: Jayanthi Selvarajdona biswasNo ratings yet
- Benceno SEA PDFDocument6 pagesBenceno SEA PDFcarolinehwangNo ratings yet
- Chemical Cleaning ChartDocument4 pagesChemical Cleaning ChartSudhanshu DashNo ratings yet
- 2001 6.3 MW Turbine of SNM Co. Ltd. Tokyo Japan in Karnataka, IndiaDocument2 pages2001 6.3 MW Turbine of SNM Co. Ltd. Tokyo Japan in Karnataka, IndiaBehzad Totakhaneh BonabNo ratings yet
- Preventing Film Coating ProblemDocument9 pagesPreventing Film Coating ProblemĐinh Anh TríNo ratings yet