You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Knee BiomechanicsDocument20 pagesKnee Biomechanicscrisanto valdezNo ratings yet
- 2.6.3 Practice - Quadratic Functions (Practice)Document10 pages2.6.3 Practice - Quadratic Functions (Practice)HyounJoun KangNo ratings yet
- Pulsar 180 Wiring Diagram PDFDocument1 pagePulsar 180 Wiring Diagram PDFroberto carlos martinez narvaez100% (2)
- 2013 - Modelling of VSC-HVDC For Slow Dynamic Studies - O. Lennerhag, V. TräffDocument102 pages2013 - Modelling of VSC-HVDC For Slow Dynamic Studies - O. Lennerhag, V. TräffAaron CrucesNo ratings yet
- ASCE 7 Wind Load CalculationDocument22 pagesASCE 7 Wind Load Calculationani145yadavNo ratings yet
- Allowable Settlement of FoundationsDocument6 pagesAllowable Settlement of Foundationssb1966No ratings yet
- Temperatue (2) TEST For o Levels PhysicsDocument12 pagesTemperatue (2) TEST For o Levels Physicsbesties tubeNo ratings yet
- Assessment 3 API 570Document12 pagesAssessment 3 API 570Mohamed ZainNo ratings yet
- Monorail Design CS 0089 (FINAL)Document8 pagesMonorail Design CS 0089 (FINAL)asvenk309No ratings yet
- 2015 - Rectifier-Inverter Technical Reference DIgSILENT PowerFactoryDocument24 pages2015 - Rectifier-Inverter Technical Reference DIgSILENT PowerFactoryAaron CrucesNo ratings yet
- 2016 - Modelling and Control of Hybrid LCC HVDC System - Ying XueDocument167 pages2016 - Modelling and Control of Hybrid LCC HVDC System - Ying XueAaron CrucesNo ratings yet
- 2019 - Feedback Control Systems - Matlab - Simulink Approach - Farzin Asadi, Robert E. Bolanos, Jorge RodriguezDocument226 pages2019 - Feedback Control Systems - Matlab - Simulink Approach - Farzin Asadi, Robert E. Bolanos, Jorge RodriguezAaron CrucesNo ratings yet
- 1 01-MatematicasDocument104 pages1 01-MatematicasAaron CrucesNo ratings yet
- 2 02-Ingenieria Electrica y ElectronicaDocument111 pages2 02-Ingenieria Electrica y ElectronicaAaron CrucesNo ratings yet
- Robust Global Stabilization of The DC-DC Boost Converter Via Hybrid Control - T. Theunisse Et Al. - Journal Article (2015)Document14 pagesRobust Global Stabilization of The DC-DC Boost Converter Via Hybrid Control - T. Theunisse Et Al. - Journal Article (2015)Aaron CrucesNo ratings yet
- 1 02-Computacion y Ciencias de La InformaticaDocument113 pages1 02-Computacion y Ciencias de La InformaticaAaron CrucesNo ratings yet
- Hybrid Control of The Boost Converter - Robust Global Stabilization - T. Theunisse Et Al. - Conference Paper (2013)Document6 pagesHybrid Control of The Boost Converter - Robust Global Stabilization - T. Theunisse Et Al. - Conference Paper (2013)Aaron CrucesNo ratings yet
- Hybrid Feedback Control Methods For Robust and Global Power Conversion - J. Chai and R. Sanfelice - Conference Paper (2015)Document6 pagesHybrid Feedback Control Methods For Robust and Global Power Conversion - J. Chai and R. Sanfelice - Conference Paper (2015)Aaron CrucesNo ratings yet
- 2016 - Simulation Model of The Future Nordic Power Grid Considering The Impact of HVDC Links - Even Strand AasDocument129 pages2016 - Simulation Model of The Future Nordic Power Grid Considering The Impact of HVDC Links - Even Strand AasAaron CrucesNo ratings yet
- 0460 443 301 GB (Caddy TIG 2200i - Manual 2019)Document28 pages0460 443 301 GB (Caddy TIG 2200i - Manual 2019)maverick kitaroNo ratings yet
- Low-Cost Non-Destructive Inspection by Simplified Digital Speckle InterferometryDocument8 pagesLow-Cost Non-Destructive Inspection by Simplified Digital Speckle InterferometryLuis Pujay MateoNo ratings yet
- Water of Crystallization Lab ReportDocument2 pagesWater of Crystallization Lab ReportjanoyeNo ratings yet
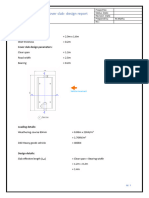
- D400-Precast Cover Slab Design ReportDocument8 pagesD400-Precast Cover Slab Design ReportmathuNo ratings yet
- Synthesis and Characterization of Superconductor Composite Bi SR Ca Cu O /la SR MnoDocument54 pagesSynthesis and Characterization of Superconductor Composite Bi SR Ca Cu O /la SR MnoNacho Delgado FerreiroNo ratings yet
- Minor Instruments 2Document7 pagesMinor Instruments 2Sarthak KhamkarNo ratings yet
- NEB Grade 11 Math Model Paper 2077-78Document3 pagesNEB Grade 11 Math Model Paper 2077-78Prem RajwanshiNo ratings yet
- Notes 4 (2023) Concepts of Fluid Kinematics and Internal FlowDocument26 pagesNotes 4 (2023) Concepts of Fluid Kinematics and Internal FlowVinn GTNo ratings yet
- NTE552 Silicon Rectifier General Purpose, Fast Recovery: FeaturesDocument1 pageNTE552 Silicon Rectifier General Purpose, Fast Recovery: FeaturesJohnnysNo ratings yet
- Mock QP - C2 Edexcel PDFDocument18 pagesMock QP - C2 Edexcel PDFmunyi13No ratings yet
- Lapangan Gas ArunDocument8 pagesLapangan Gas ArunRnd JuliusNo ratings yet
- Experiment Guide Newton S Thanksgiving Tablecloth TrickDocument1 pageExperiment Guide Newton S Thanksgiving Tablecloth Trickapi-504410689No ratings yet
- Turning Problems - DR Saqib 2018Document11 pagesTurning Problems - DR Saqib 2018254No ratings yet
- PHY4003 Modern Optics (Class 21) : Joon I. Jang Department of Physics, Sogang University Spring Semester 2022Document22 pagesPHY4003 Modern Optics (Class 21) : Joon I. Jang Department of Physics, Sogang University Spring Semester 2022김지수No ratings yet
- Christian ControversiesDocument192 pagesChristian ControversiesAransh SinghNo ratings yet
- H O CO: CHEM1102 Worksheet 10 - Answers To Critical Thinking QuestionsDocument4 pagesH O CO: CHEM1102 Worksheet 10 - Answers To Critical Thinking QuestionsJohn-dred BautistaNo ratings yet
- Structural Dynamics - Computational-Dynamics - Soren R. K. Nielsen PDFDocument177 pagesStructural Dynamics - Computational-Dynamics - Soren R. K. Nielsen PDFalfonxxl100% (1)
- 2ndbuilding ReportDocument53 pages2ndbuilding ReportRooking Ewondo SfuutNo ratings yet
- Compression Test For MetalsDocument11 pagesCompression Test For MetalsmohamedyahaiNo ratings yet
- APEX Rev 02B EntireDocument133 pagesAPEX Rev 02B EntirePiman MiriNo ratings yet
- Googlepreview PDFDocument89 pagesGooglepreview PDFFaris FadliNo ratings yet
- FG16R16 FG16OR16: - 0,6/1 KV - 0,6/1 KVDocument6 pagesFG16R16 FG16OR16: - 0,6/1 KV - 0,6/1 KVEmre DalgicNo ratings yet