You might also like
- Servo FundamentalsDocument12 pagesServo FundamentalsMohanraj SelvakumarNo ratings yet
- The Basic Motion ControlDocument3 pagesThe Basic Motion ControlEdgar David UribeNo ratings yet
- Motion Control Basics PDFDocument8 pagesMotion Control Basics PDFFouad ElhajjiNo ratings yet
- Calculating Motor Start TimeDocument8 pagesCalculating Motor Start TimeRaj SekharNo ratings yet
- Sizing Servo Systems for Motion ProfilesDocument3 pagesSizing Servo Systems for Motion ProfilesMaman FirmansyahNo ratings yet
- Servo Motor Selection Criterion For Mechatronic ApplicationsDocument6 pagesServo Motor Selection Criterion For Mechatronic Applicationsrajesh_300376814No ratings yet
- Calculating Motor Starting Times Using Torque and Current Exponent RatiosDocument0 pagesCalculating Motor Starting Times Using Torque and Current Exponent RatiosmicrefeeNo ratings yet
- Plug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationDocument14 pagesPlug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationPrateesh RajNo ratings yet
- Optimal Selection of Motor and Gearhead in Mechatronic ApplicationsDocument10 pagesOptimal Selection of Motor and Gearhead in Mechatronic ApplicationsMohanraj SelvakumarNo ratings yet
- Selection of Servo Motors and Drives: Dal Y. Ohm, Drivetech, IncDocument8 pagesSelection of Servo Motors and Drives: Dal Y. Ohm, Drivetech, IncInderpreet SinghNo ratings yet
- Load To Motor Inertia Mismatch: Unveiling The TruthDocument13 pagesLoad To Motor Inertia Mismatch: Unveiling The TruthDaniel SileshiNo ratings yet
- Quantitative Analysis For The Vehicle Moment of Inertia and Physical SimulationDocument4 pagesQuantitative Analysis For The Vehicle Moment of Inertia and Physical SimulationSri BalajiNo ratings yet
- The Basics of Motion Control-Part 2Document3 pagesThe Basics of Motion Control-Part 2abduhalimNo ratings yet
- Spark Ignition Engine Torque Management: Purdue University (West Lafayette, IN), Ford Motor Company (Dearborn, MI)Document6 pagesSpark Ignition Engine Torque Management: Purdue University (West Lafayette, IN), Ford Motor Company (Dearborn, MI)MohammadGhNo ratings yet
- Torque and Inertia CalculationsDocument20 pagesTorque and Inertia Calculationsmanfredm6435No ratings yet
- 3 Methods for Controlling Stepper Motor SpeedDocument9 pages3 Methods for Controlling Stepper Motor SpeedChayan MondalNo ratings yet
- 1 s2.0 S1474667017303464 Main PDFDocument6 pages1 s2.0 S1474667017303464 Main PDFBagas Eko LaksonoNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- Low Power Design of Digital SystemsDocument28 pagesLow Power Design of Digital SystemssuperECENo ratings yet
- HannettCombustion Turbine Dynamic Model Validation From TestsGas TurbineDocument7 pagesHannettCombustion Turbine Dynamic Model Validation From TestsGas TurbineWalter Ruiz PorrasNo ratings yet
- Transient Stability Analysis of 6 Bus System Using E-TAP SoftwareDocument10 pagesTransient Stability Analysis of 6 Bus System Using E-TAP SoftwareSaran KuttyNo ratings yet
- Motor Sizing CalculationDocument3 pagesMotor Sizing CalculationRizwan TahirNo ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Seminar On Analysis of Wind Turbine Vibrations Based On SCADA DataDocument18 pagesSeminar On Analysis of Wind Turbine Vibrations Based On SCADA Datavishal ullegaddiNo ratings yet
- Optimal Relays: Coordination of Directional Over Current in Power System Using Genetic AlgorithmDocument4 pagesOptimal Relays: Coordination of Directional Over Current in Power System Using Genetic AlgorithmthavaselvanNo ratings yet
- Small Engine Dynamo TestingDocument11 pagesSmall Engine Dynamo TestingKhairil AnuarNo ratings yet
- How Measuring Shaft Power Saves Fuel & MaintenanceDocument13 pagesHow Measuring Shaft Power Saves Fuel & MaintenanceibadurrahmanNo ratings yet
- Performance Comparison of Conventional Controller With Fuzzy Logic Controller Using Chopper Circuit and Fuzzy Tuned PID ControllerDocument12 pagesPerformance Comparison of Conventional Controller With Fuzzy Logic Controller Using Chopper Circuit and Fuzzy Tuned PID ControllerranaNo ratings yet
- Effective Estimation of Speed and Rotor Position Using Kalman FilterDocument7 pagesEffective Estimation of Speed and Rotor Position Using Kalman FilterAli H. NumanNo ratings yet
- Energies 11 02886Document16 pagesEnergies 11 02886Trần Tấn LộcNo ratings yet
- An - Application - of - Explicit - Model - Predictive - Control - To - Electric - Power - Assisted - Steering - SystemsDocument6 pagesAn - Application - of - Explicit - Model - Predictive - Control - To - Electric - Power - Assisted - Steering - Systems시드세흐리아르알리나크비No ratings yet
- Aircraft Block Diagram Reduction and Control SystemsDocument14 pagesAircraft Block Diagram Reduction and Control SystemsCraig JonesNo ratings yet
- DC Motor Parameter Identification Using Speed Step ResponsesDocument6 pagesDC Motor Parameter Identification Using Speed Step ResponsesHasson SniperNo ratings yet
- Paper CT4 Load Assumptions For Pitch System Manj 041Document5 pagesPaper CT4 Load Assumptions For Pitch System Manj 041mbreuking6943No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Load Flow Basic Principles DigsilentDocument17 pagesLoad Flow Basic Principles Digsilentjcrodriguez83100% (2)
- ABB TechnicalGuide 8Document32 pagesABB TechnicalGuide 8eng_mhassan1No ratings yet
- Calculation of TmsDocument6 pagesCalculation of TmsMihir PatelNo ratings yet
- Unesco - Eolss Sample Chapters: Controller Design in Time-DomainDocument9 pagesUnesco - Eolss Sample Chapters: Controller Design in Time-DomainAnonymous EPSHB9tXZNo ratings yet
- Accumulator TensionDocument4 pagesAccumulator TensionMostafa MehrjerdiNo ratings yet
- Adaptive Bandwidth Approach ON DTC Controlled Induction MotorDocument9 pagesAdaptive Bandwidth Approach ON DTC Controlled Induction MotorijicsjournalNo ratings yet
- 33 Gear Fault Diagnosis by Motor Current Analysis Application To PDFDocument7 pages33 Gear Fault Diagnosis by Motor Current Analysis Application To PDFmanuelNo ratings yet
- Ultra-High Speed Drive System Test Bench CharacterizationDocument7 pagesUltra-High Speed Drive System Test Bench CharacterizationJerry HalibasNo ratings yet
- In-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainsDocument15 pagesIn-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainspranjaljecNo ratings yet
- Speed Control of Switched Reluctance Motor Based On Fuzzy Logic ControllerDocument5 pagesSpeed Control of Switched Reluctance Motor Based On Fuzzy Logic Controllergodspower brunoNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Driveline Component Selection GuideDocument32 pagesDriveline Component Selection Guideseaqu3stNo ratings yet
- Randomwebsite Ref (Rms Torque)Document5 pagesRandomwebsite Ref (Rms Torque)Robotics LabNo ratings yet
- Ris R 1500 PDFDocument84 pagesRis R 1500 PDFshivakeesNo ratings yet
- Application Note Understanding Torque RippleDocument3 pagesApplication Note Understanding Torque RipplethunderpedroNo ratings yet
- Ijetae 0113 12Document7 pagesIjetae 0113 12ash1968No ratings yet
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenNo ratings yet
- Continuous torque monitoring improves predictive maintenanceDocument13 pagesContinuous torque monitoring improves predictive maintenancemlouredocasadoNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- What Is RCMDocument1 pageWhat Is RCMAbdel ChawkiNo ratings yet
- Using Thermography To Uncover Hidden ProblemsDocument14 pagesUsing Thermography To Uncover Hidden ProblemsAbdel ChawkiNo ratings yet
- The Hot Issue of Motor Temperature Ratings - EC&MDocument9 pagesThe Hot Issue of Motor Temperature Ratings - EC&MAbdel ChawkiNo ratings yet
- Belts Systems, Types of Belts Systems (Flat Belt Drives) : January 2016Document9 pagesBelts Systems, Types of Belts Systems (Flat Belt Drives) : January 2016Abdel ChawkiNo ratings yet
- Legend SymbolsDocument21 pagesLegend SymbolsFaJar FieLdenNo ratings yet
- Linear Algebra AnswersDocument364 pagesLinear Algebra Answersdull_matterNo ratings yet
- 6-13-14 Hospital Risk Assesment PresentationDocument19 pages6-13-14 Hospital Risk Assesment PresentationGilbert IskandarNo ratings yet
- Purpose-Built Wireless For Video Surveillance: Secure. Reliable. PredictableDocument4 pagesPurpose-Built Wireless For Video Surveillance: Secure. Reliable. PredictableMarcel Alexander PatiñoNo ratings yet
- GAMESHARK DIGIMON WORLD 2 Games GuidesDocument20 pagesGAMESHARK DIGIMON WORLD 2 Games GuidesWanwan Agile TigerNo ratings yet
- archR69311A Interactive Electronic QP WMA13 - 01Document32 pagesarchR69311A Interactive Electronic QP WMA13 - 01Amjad AshaNo ratings yet
- DG 01 003-E 03-02 PANDAROS IV PDFDocument44 pagesDG 01 003-E 03-02 PANDAROS IV PDFbatavia elektroNo ratings yet
- A - B Sercos IDNsDocument64 pagesA - B Sercos IDNsleobooneNo ratings yet
- 7937v130 (Step Up Converter)Document14 pages7937v130 (Step Up Converter)sushant bakhunchheNo ratings yet
- DCIT 65 Social and Professional Issues Privacy SurveillanceDocument4 pagesDCIT 65 Social and Professional Issues Privacy SurveillancegelaNo ratings yet
- Dbms 4Document47 pagesDbms 4zatharoxNo ratings yet
- Introduction To Simplex, Half Duplex! and Full Duplex - N PDFDocument3 pagesIntroduction To Simplex, Half Duplex! and Full Duplex - N PDFshahaban aliNo ratings yet
- Implementing-Hierarchies CFDocument15 pagesImplementing-Hierarchies CFVamshiNo ratings yet
- Chapter 1 1Document20 pagesChapter 1 1Sibora KapedaniNo ratings yet
- AVEVA Hull Structural PDFDocument4 pagesAVEVA Hull Structural PDFSebastianNo ratings yet
- Cloud Forum Asia BrochureDocument6 pagesCloud Forum Asia BrochuregembelkayaNo ratings yet
- Extend contract fact sheetDocument4 pagesExtend contract fact sheetFarzhell Farley EliangNo ratings yet
- How To Create in 5 Minutes A SQL Tuning Test Case Using SQLTXPLAINDocument45 pagesHow To Create in 5 Minutes A SQL Tuning Test Case Using SQLTXPLAINvevaradhNo ratings yet
- Rfic & Mmic-0Document12 pagesRfic & Mmic-0PhilippeaNo ratings yet
- Lab X - Building A Machine-Learning Annotator With Watson Knowledge StudioDocument27 pagesLab X - Building A Machine-Learning Annotator With Watson Knowledge StudioManoj KumarNo ratings yet
- Building Java Programs: Conditional ExecutionDocument44 pagesBuilding Java Programs: Conditional ExecutionMuhamad IhsanNo ratings yet
- SolidWorks Tutorial Iphone5Document20 pagesSolidWorks Tutorial Iphone5Crispy Bnd0% (1)
- Introduction to Numpy arrays and operationsDocument11 pagesIntroduction to Numpy arrays and operationsVincent GiangNo ratings yet
- FDocument99 pagesFCRISTINA TAMASNo ratings yet
- 2 7490 Decade CounterDocument4 pages2 7490 Decade Countervirikris100% (1)
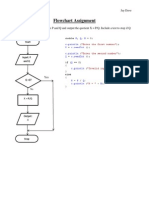
- Jay Dave Flowchart AssignmentDocument5 pagesJay Dave Flowchart Assignmentapi-225496804No ratings yet
- MPEG4 DVR with 500GB HDD and 170 Days RecordingDocument2 pagesMPEG4 DVR with 500GB HDD and 170 Days RecordingEduardo Daniel Medina AlvarezNo ratings yet
- Istqb Advanced Test Analyst - QuestionsDocument20 pagesIstqb Advanced Test Analyst - QuestionsIuliana Andronache0% (3)
- An Efficient Parallel Gauss Seidel Algorithm For The Solution of Load Flow Problems 0Document5 pagesAn Efficient Parallel Gauss Seidel Algorithm For The Solution of Load Flow Problems 0doniNo ratings yet
- IC 974 (LX) Eng 4-05Document11 pagesIC 974 (LX) Eng 4-05Michał WłodarkiewiczNo ratings yet
- Premax CatalogueDocument8 pagesPremax CatalogueBasil Le BõrgnëNo ratings yet