You might also like
- NTCP TCPDocument54 pagesNTCP TCPSAlonii Chawla100% (2)
- Evaluating Velocity and Mass Correction When Scaling Structures Subjected To Impact LoadingDocument14 pagesEvaluating Velocity and Mass Correction When Scaling Structures Subjected To Impact LoadingCAE 101No ratings yet
- Implementation of Nonlinear Cyclic Constitutive Model With Strain Softening in FLACDocument9 pagesImplementation of Nonlinear Cyclic Constitutive Model With Strain Softening in FLACshachen2014No ratings yet
- Scaling Impacted StructuresDocument16 pagesScaling Impacted StructuresCAE 101No ratings yet
- International Journal of Fracture Volume 159 Issue 1 2009 (Doi 10.1007 - s10704-009-9384-x) A. D. Drozdov J. DeC. Christiansen - Creep Failure of Polypropylene - Experiments and Constitutive ModelingDocument17 pagesInternational Journal of Fracture Volume 159 Issue 1 2009 (Doi 10.1007 - s10704-009-9384-x) A. D. Drozdov J. DeC. Christiansen - Creep Failure of Polypropylene - Experiments and Constitutive ModelingalifaramarzNo ratings yet
- Comptes Rendus Mecanique: Dominique Leguillon, Éric Martin, Marie-Christine Lafarie-FrenotDocument7 pagesComptes Rendus Mecanique: Dominique Leguillon, Éric Martin, Marie-Christine Lafarie-FrenotYaku YokuNo ratings yet
- J5. Modeling and Numerical Simulation of Fatigue Crack Growth in Cracked Specimens Containing Material Discontinuities SOM 2016Document14 pagesJ5. Modeling and Numerical Simulation of Fatigue Crack Growth in Cracked Specimens Containing Material Discontinuities SOM 2016AzherNo ratings yet
- A64Document7 pagesA64Shrishail SambanniNo ratings yet
- Warsaw University of Technology Faculty of Civil Engineering, Institute of Structural Mechanics Armii Ludowej 16, 00-637 Warszawa, PolandDocument14 pagesWarsaw University of Technology Faculty of Civil Engineering, Institute of Structural Mechanics Armii Ludowej 16, 00-637 Warszawa, Polandtruva_kissNo ratings yet
- Simulation of Brittle SolidsDocument13 pagesSimulation of Brittle Solidsdr_kh_ahmedNo ratings yet
- Lanze N Doer FerDocument1 pageLanze N Doer FerAsemota OghoghoNo ratings yet
- Cilamce2017 0805 Papic CamilaufpeDocument11 pagesCilamce2017 0805 Papic CamilaufpeMarlos José Ribeiro GuimarãesNo ratings yet
- Idges PDFDocument14 pagesIdges PDFBarış ÖzcanNo ratings yet
- Bearing Capacity Formura For Shallow Foundations During EarthquakeDocument11 pagesBearing Capacity Formura For Shallow Foundations During EarthquakeboyzesNo ratings yet
- Pie Tru SZC Zak 1987Document20 pagesPie Tru SZC Zak 1987johncruz32No ratings yet
- Well-Posed and Ill-Posed Behaviour of The (I) - Rheology For Granular FlowDocument25 pagesWell-Posed and Ill-Posed Behaviour of The (I) - Rheology For Granular FlowRajkumar Chemical Engg. Dept.No ratings yet
- Publication Nfiiny4qmvDocument20 pagesPublication Nfiiny4qmvOthman BaizNo ratings yet
- Calibration 0Document5 pagesCalibration 0MIKE GalárragaNo ratings yet
- Applied Mathematics and MechanicsDocument12 pagesApplied Mathematics and MechanicswalacrNo ratings yet
- San Pedro - Lab 2Document11 pagesSan Pedro - Lab 2Amorfina SanpedroNo ratings yet
- Thermal PhysicsDocument5 pagesThermal PhysicsLeonardoNo ratings yet
- Phase Field Modeling of Brittle and Ductile FractureDocument4 pagesPhase Field Modeling of Brittle and Ductile FractureGNo ratings yet
- Sheet - Ansys, SpringbackDocument9 pagesSheet - Ansys, Springbacksupersonny007No ratings yet
- Advanced Soil Constitutive Models and Their Applications To Offshore Geotechnical ProblemsDocument8 pagesAdvanced Soil Constitutive Models and Their Applications To Offshore Geotechnical ProblemsAbhishek Ghosh DastiderNo ratings yet
- Multicomponent AVODocument31 pagesMulticomponent AVOghassen laouiniNo ratings yet
- Imecc UnicampDocument14 pagesImecc UnicampShubha KandelNo ratings yet
- Jurong Junior College Physics Department Tutorial: Measurements (Solutions)Document4 pagesJurong Junior College Physics Department Tutorial: Measurements (Solutions)Shaikh Mohammed EhsenNo ratings yet
- Modeling of Nevada Sand Behavior Using CHSOIL: February 2011Document9 pagesModeling of Nevada Sand Behavior Using CHSOIL: February 2011Zhenhe SongNo ratings yet
- kmjk07 PDFDocument10 pageskmjk07 PDFParamita BhattacharyaNo ratings yet
- Numerical Technique in Plasticity Including Solution Advancement ControlDocument20 pagesNumerical Technique in Plasticity Including Solution Advancement ControlSebastiao SilvaNo ratings yet
- Warping+Bernoulli Beam ModelDocument6 pagesWarping+Bernoulli Beam ModelTomás Bravo TetlakNo ratings yet
- Xisto EcoomasDocument14 pagesXisto EcoomasCarlos XistoNo ratings yet
- Dynamics of Pile Driving by FEMDocument11 pagesDynamics of Pile Driving by FEMDiana Alice SugunanNo ratings yet
- Application of Physical and Mathematical Modelling in Underground ExcavationsDocument8 pagesApplication of Physical and Mathematical Modelling in Underground ExcavationsrannscribdNo ratings yet
- Wang 2013Document11 pagesWang 2013pawan yadavNo ratings yet
- Numerical Study of Particle, Bubble Movements and Tube Erosion in Gas Fluidized BedsDocument10 pagesNumerical Study of Particle, Bubble Movements and Tube Erosion in Gas Fluidized BedsflaviocolmanNo ratings yet
- Longitudinal Deformation Profile of A Tunnel Driven Within A Burger Rock MassDocument9 pagesLongitudinal Deformation Profile of A Tunnel Driven Within A Burger Rock MasswolvesyNo ratings yet
- Numerical Analysis of Strains and Stresses in The Hot Cogging ProcessDocument8 pagesNumerical Analysis of Strains and Stresses in The Hot Cogging ProcessAnkit Kumar MeenaNo ratings yet
- MIT8 962S20 Pset06Document5 pagesMIT8 962S20 Pset06Robin Red MsiskaNo ratings yet
- Motamed Et Al. (2015) - 6ICEGEDocument9 pagesMotamed Et Al. (2015) - 6ICEGEgiuseppe.colamarinoNo ratings yet
- On The Foundations of Gravitation, Inertia and Gravitational WavesDocument9 pagesOn The Foundations of Gravitation, Inertia and Gravitational Wavesgiorgiofontana100% (5)
- Hyperbolic Divergence CleaningDocument29 pagesHyperbolic Divergence CleaningMaxtron MoonNo ratings yet
- Ucsc Soe 12 05Document26 pagesUcsc Soe 12 05Ana LuizaNo ratings yet
- Bianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityDocument8 pagesBianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityManuel RodriguesNo ratings yet
- Lattice BGK Model For Incompressible Navier-Stokes Equation: Journal of Computational Physics 165, 288-306 (2000)Document19 pagesLattice BGK Model For Incompressible Navier-Stokes Equation: Journal of Computational Physics 165, 288-306 (2000)KaustubhNo ratings yet
- 18th ESV Paper Crash Pulse Modeling For Vehicle Safety Research Michael S. Varat Stein E. HusherDocument9 pages18th ESV Paper Crash Pulse Modeling For Vehicle Safety Research Michael S. Varat Stein E. HusherAnonymous hXVnBhi7fwNo ratings yet
- On Constitutive Relations at Finite Strain: Hypo-Elasticity and Elasto-Plasticity With Isotropic or Kinematic HardeningDocument35 pagesOn Constitutive Relations at Finite Strain: Hypo-Elasticity and Elasto-Plasticity With Isotropic or Kinematic HardeningBianca EndoNo ratings yet
- Exam Material1Document81 pagesExam Material1zoya attiqueNo ratings yet
- AAEC 6984 / SPRING 2014 Instructor: Klaus MoeltnerDocument9 pagesAAEC 6984 / SPRING 2014 Instructor: Klaus MoeltnerRenato Salazar RiosNo ratings yet
- Nlewis65 102 109 Knowledge Structure Bird 27 No 2 Spring 1993 CeeDocument8 pagesNlewis65 102 109 Knowledge Structure Bird 27 No 2 Spring 1993 CeeLeonor Zavaleta AbejarNo ratings yet
- 2011 - Nonoyama - Performance of The SPH Method For Deformation Analyses of GeomaterialsDocument16 pages2011 - Nonoyama - Performance of The SPH Method For Deformation Analyses of GeomaterialshdphimxemNo ratings yet
- Helius CompositesDocument15 pagesHelius CompositesKruthika K CNo ratings yet
- 09.2005 IJNME DiscUBDocument20 pages09.2005 IJNME DiscUBkristian.krabbenhoft1463No ratings yet
- Doctors 2023Document24 pagesDoctors 2023Helen DoctorsNo ratings yet
- The Effect of Failure Criterion On Slope Stability AnalysisDocument11 pagesThe Effect of Failure Criterion On Slope Stability AnalysisNadim527No ratings yet
- Brane Cosmology From Heterotic String Theory: Apostolos Kuiroukidis and Demetrios B. PapadopoulosDocument15 pagesBrane Cosmology From Heterotic String Theory: Apostolos Kuiroukidis and Demetrios B. PapadopoulosmimoraydenNo ratings yet
- Tut 17Document3 pagesTut 17NVNo ratings yet
- Investigation On The Cause of Instability in Time Domain Acoustic BEM Using The Wave Vector ConceptDocument5 pagesInvestigation On The Cause of Instability in Time Domain Acoustic BEM Using The Wave Vector Conceptklomps_jrNo ratings yet
- 2000PES Thermo AllDocument33 pages2000PES Thermo AllMoeenulHaqueNo ratings yet
- Van Marcke 002Document8 pagesVan Marcke 002Maximum ChoiceNo ratings yet
- HydrologyDocument72 pagesHydrologyAyuni AzizNo ratings yet
- Release Not Ese Tabs V 1801Document31 pagesRelease Not Ese Tabs V 1801BMSF khaliqeNo ratings yet
- User Manual Redpoint - PirometroDocument13 pagesUser Manual Redpoint - PirometroPedro SilvaNo ratings yet
- Basic Understandings of Electrical CircuitsDocument106 pagesBasic Understandings of Electrical CircuitsMd. Mahadi Hasan (212014037)No ratings yet
- Em Lab Manual 1Document42 pagesEm Lab Manual 1atikmkaziNo ratings yet
- Procedure Qualification RecordDocument6 pagesProcedure Qualification RecordGaurang PandyaNo ratings yet
- Markscheme SL Paper 1Document60 pagesMarkscheme SL Paper 1Carolina Blasco Méndez 8INo ratings yet
- Concrete Construction Article PDF - Two-Day Construction Cycle For High-Rise Structures Based On Use of Preshores PDFDocument5 pagesConcrete Construction Article PDF - Two-Day Construction Cycle For High-Rise Structures Based On Use of Preshores PDFPrompt Torre LoyolaNo ratings yet
- Earthquake Research Advances: Yu LiDocument9 pagesEarthquake Research Advances: Yu LiFajri YantoNo ratings yet
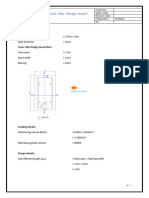
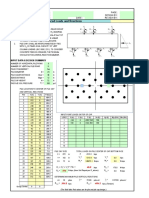
- D400-Precast Cover Slab Design ReportDocument8 pagesD400-Precast Cover Slab Design ReportmathuNo ratings yet
- Diff Between Inland and Rotary FIPDocument10 pagesDiff Between Inland and Rotary FIPRajesh Apte100% (1)
- Acph Test Report FormsDocument2 pagesAcph Test Report FormsSandhyaRamakrishnaNo ratings yet
- 10.8 Pioneers Ofzpf-Theory: Tom Bearden: Francisco: Strawberry Hill PressDocument3 pages10.8 Pioneers Ofzpf-Theory: Tom Bearden: Francisco: Strawberry Hill PressDIVYA KUMARNo ratings yet
- Lec 24Document6 pagesLec 24Faraz zeeshanNo ratings yet
- ESAS ReviewerDocument289 pagesESAS Reviewerpepenapao1217100% (1)
- Electrolysis: Lesson 10 - Electrolysis (This Lesson Comes in The Science Part II)Document6 pagesElectrolysis: Lesson 10 - Electrolysis (This Lesson Comes in The Science Part II)SwarnapaliliyanageNo ratings yet
- Bellato Et Al - Interpretation of Failure Load Tests On Micropiles PDFDocument14 pagesBellato Et Al - Interpretation of Failure Load Tests On Micropiles PDFbusyspiderNo ratings yet
- Mambaling, Cebu City: Mambaling National High SchoolDocument2 pagesMambaling, Cebu City: Mambaling National High SchoolMarian Alexis FernandezNo ratings yet
- Study Material GeophysicsDocument18 pagesStudy Material Geophysicsanjali9myneniNo ratings yet
- R-KEM II ETA - Polyester Resin For ConcreteDocument16 pagesR-KEM II ETA - Polyester Resin For ConcreteLouis BirNo ratings yet
- Calculation: Design of Rectangular ColDocument84 pagesCalculation: Design of Rectangular Colakram1978No ratings yet
- Sheet 11 Problems Sheet On FluidsDocument2 pagesSheet 11 Problems Sheet On FluidslozzzzzNo ratings yet
- R Zendefy Ános: FebruaryDocument71 pagesR Zendefy Ános: Februaryfeten chihiNo ratings yet
- Conditional Equilibrium Constant of ReactionDocument60 pagesConditional Equilibrium Constant of ReactionTÚ Cao Ngọc ThiệnNo ratings yet
- Low Cycle Bending Gear FatigueDocument4 pagesLow Cycle Bending Gear FatiguehammermfgNo ratings yet
- Ch2 3rded ExtendedDocument81 pagesCh2 3rded ExtendedReza SadeghiNo ratings yet
- - Odd-Numbered: xs jk z+φDocument11 pages- Odd-Numbered: xs jk z+φshinmyoungjuNo ratings yet
- Is 6416 1988Document10 pagesIs 6416 1988todd_jim49100% (1)
- Pile Cap Balanced LoadsDocument1 pagePile Cap Balanced LoadsKausik DewanNo ratings yet