You might also like
- Interpreting Engineering Data: Through-Beam Sensors and Retro-Reflective SensorsDocument5 pagesInterpreting Engineering Data: Through-Beam Sensors and Retro-Reflective Sensorsotomasi industriNo ratings yet
- Photoelectric Sensors Technical Guide: Explanation of TermsDocument9 pagesPhotoelectric Sensors Technical Guide: Explanation of TermsFahad MohamedNo ratings yet
- Photoelectric Sensor SolutionsDocument13 pagesPhotoelectric Sensor SolutionsHa RbNo ratings yet
- (Sensor Octoelectrico) PDF en Soex enDocument30 pages(Sensor Octoelectrico) PDF en Soex endiegob_2No ratings yet
- Man Mic Basics Photoelectric en A22 DRW 950369 02 000Document10 pagesMan Mic Basics Photoelectric en A22 DRW 950369 02 000Leoned Cova OrozcoNo ratings yet
- Ultrasonic Sensors: Ultimate Ultrasonic Sensor Solution From SickDocument44 pagesUltrasonic Sensors: Ultimate Ultrasonic Sensor Solution From SickDener Bustamante PerezNo ratings yet
- Man Mic Basics Capacitive en A22 DRW 950371 02 000Document12 pagesMan Mic Basics Capacitive en A22 DRW 950371 02 000Guille GonzalezNo ratings yet
- Photo Electric SensorsDocument33 pagesPhoto Electric SensorsBharathprabhu100% (2)
- ProximitySensors Lec1Document17 pagesProximitySensors Lec1Atharva SoniNo ratings yet
- DEE 3323.13 Sensor2Document88 pagesDEE 3323.13 Sensor2nabilo20No ratings yet
- Distance Sensor 2Document3 pagesDistance Sensor 2r.vishalvibhakarNo ratings yet
- Ultrasonic SensorTraining MaterialDocument15 pagesUltrasonic SensorTraining MaterialToan PhamNo ratings yet
- Ultrasonic SensorTraining MaterialDocument15 pagesUltrasonic SensorTraining MaterialToan PhamNo ratings yet
- CONTRINEX Ultrasonic Proximity SwitchesDocument15 pagesCONTRINEX Ultrasonic Proximity SwitchesRoi JacquesNo ratings yet
- Fundamentals of Photoelectric SensorsDocument6 pagesFundamentals of Photoelectric SensorsKimo KimoNo ratings yet
- Understanding Triangulation Laser Measurement 22122023 V1Document8 pagesUnderstanding Triangulation Laser Measurement 22122023 V1chloee1008No ratings yet
- RangefinderDocument13 pagesRangefinderRabi khanNo ratings yet
- Elements of Technology (Eot) : Assignment 3Document38 pagesElements of Technology (Eot) : Assignment 3nikitaNo ratings yet
- Optical SensorsDocument9 pagesOptical SensorsrthrbyNo ratings yet
- 3 Chapter 3 Part 1 Remote Sensing Systems PDFDocument60 pages3 Chapter 3 Part 1 Remote Sensing Systems PDFRojina ThapamagarNo ratings yet
- Proximity SensorsDocument4 pagesProximity SensorsRohit Kumar SinghNo ratings yet
- Series: New Standard!Document20 pagesSeries: New Standard!albiox99No ratings yet
- Electronic Component Computer Processor Light Computer Tactile SensorDocument6 pagesElectronic Component Computer Processor Light Computer Tactile SensorFrezer BelayNo ratings yet
- Cali Opt Prox SensorDocument5 pagesCali Opt Prox SensorbehzadNo ratings yet
- Sensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionDocument15 pagesSensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionKram Alim VillonNo ratings yet
- GeographyDocument20 pagesGeographyAshiya 21No ratings yet
- Series: New Standard!Document24 pagesSeries: New Standard!ovNo ratings yet
- 4 SensorsDocument39 pages4 SensorsmkpqNo ratings yet
- Siemens 3RG7404 0CH00 DatasheetDocument54 pagesSiemens 3RG7404 0CH00 DatasheetManea George-CristianNo ratings yet
- Proximity SensorsDocument9 pagesProximity SensorsSONAL P JOSEPH 1561363No ratings yet
- Sensor Models: MR M.D Shekede & I.GwitiraDocument14 pagesSensor Models: MR M.D Shekede & I.GwitiraStanley Stego MudzengiNo ratings yet
- What Is A SensorDocument17 pagesWhat Is A SensorPatil Amol PandurangNo ratings yet
- 2016070805Document4 pages2016070805dassujoy312No ratings yet
- Coil Oscillator Trigger Circuit Output Circuit Motion Direction Proximity Switch TargetDocument14 pagesCoil Oscillator Trigger Circuit Output Circuit Motion Direction Proximity Switch Targetrc_casas99No ratings yet
- Series: New Standard!Document24 pagesSeries: New Standard!Alvin BarriosNo ratings yet
- Remote Sensing Sensors: GNR401 Dr. A. BhattacharyaDocument24 pagesRemote Sensing Sensors: GNR401 Dr. A. BhattacharyaKushana SaikirannNo ratings yet
- Keyence FS2 60Document10 pagesKeyence FS2 60ntdien923No ratings yet
- Sensors and ActuatorsDocument27 pagesSensors and ActuatorsLabhansh AgrawalNo ratings yet
- Photoelectric Sensors: Technical SupportDocument8 pagesPhotoelectric Sensors: Technical SupporttadyNo ratings yet
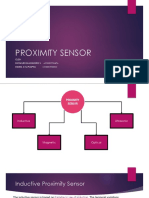
- Proximity Sensors: by Subhransu MohapatraDocument14 pagesProximity Sensors: by Subhransu MohapatraSubhransu Mohapatra100% (1)
- LAB 7 EmiDocument10 pagesLAB 7 EmiHassan AamerNo ratings yet
- Experiences With Minirobot Platforms in Robotics and AI LaboratoryDocument5 pagesExperiences With Minirobot Platforms in Robotics and AI LaboratoryEnricCervera100% (1)
- Mada8 6Document38 pagesMada8 6Himanshu JaiswalNo ratings yet
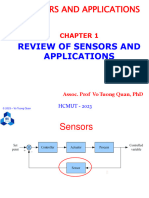
- Chapter 1 - Review of Sensors and ApplicationsDocument116 pagesChapter 1 - Review of Sensors and ApplicationsMinh Lê Nguyễn QuangNo ratings yet
- Proximity Sensor: Oleh: DIOSKURI DANISWORO S. Indira Ayu PuspitaDocument12 pagesProximity Sensor: Oleh: DIOSKURI DANISWORO S. Indira Ayu PuspitaindiraNo ratings yet
- Nota RS 4Document29 pagesNota RS 4sham2258No ratings yet
- Design of High-Precision Infrared Multi-Touch ScreDocument6 pagesDesign of High-Precision Infrared Multi-Touch ScreValentin ApostolovNo ratings yet
- Using Ultrasonic and Infrared Sensors For Distance MeasurementDocument6 pagesUsing Ultrasonic and Infrared Sensors For Distance Measurementz_e_u_s_4No ratings yet
- OIE 751 ROBOTICS Unit 3 Class 7 (29-9-2020)Document13 pagesOIE 751 ROBOTICS Unit 3 Class 7 (29-9-2020)MICHEL RAJNo ratings yet
- Sensor 1fffDocument33 pagesSensor 1fffSudhanshu PatelNo ratings yet
- Unit 2 - Ultrasonic and Touch SensorsDocument30 pagesUnit 2 - Ultrasonic and Touch Sensorsviren mallyaNo ratings yet
- Proximity SensorsDocument3 pagesProximity SensorsSaurabh SrivastavaNo ratings yet
- Sensors Election ToolDocument6 pagesSensors Election ToolrohanNo ratings yet
- Capacitive Proximity SensorDocument45 pagesCapacitive Proximity SensorashleshNo ratings yet
- Optical Proximity SensorsDocument8 pagesOptical Proximity SensorsKhoyrul Huda0% (1)
- REMOTE SENSING - Passive Sensors: JG Liu, Imperial College London, London, UKDocument9 pagesREMOTE SENSING - Passive Sensors: JG Liu, Imperial College London, London, UKMarco Antonio SucapucaNo ratings yet
- Performance of An Uncooled Imaging Interferometric Spectrometer With Intrinsic Background RadiationDocument17 pagesPerformance of An Uncooled Imaging Interferometric Spectrometer With Intrinsic Background Radiationthomasie1No ratings yet
- TB Motion SensorDocument162 pagesTB Motion SensorTarikuNo ratings yet
- 10 DataSheet Reflector-Targets 22-08-2006Document2 pages10 DataSheet Reflector-Targets 22-08-2006Kosygin LeishangthemNo ratings yet
- Best Durability For Wash-Down Applications: Photoelectric Sensors in M18 Stainless Steel HousingDocument14 pagesBest Durability For Wash-Down Applications: Photoelectric Sensors in M18 Stainless Steel Housingkasim leeNo ratings yet
- Avery Dennison Reflective Products: Product CatalogDocument12 pagesAvery Dennison Reflective Products: Product CatalogRachel Holland100% (1)
- Smart DustDocument6 pagesSmart DustPraveen ChandNo ratings yet
- As 70660 LV-N SG 469GB GB WW 1056-2Document4 pagesAs 70660 LV-N SG 469GB GB WW 1056-2mhafizanNo ratings yet
- Leuze Cubic 3 Series SensorsDocument48 pagesLeuze Cubic 3 Series SensorsNurcholisNo ratings yet
- ASTM-D4280-04 Road StudsDocument6 pagesASTM-D4280-04 Road StudsSundara NayakanNo ratings yet
- SeminarDocument18 pagesSeminarNIDHI JARIWALANo ratings yet
- Pedestrian Safety Lesson Plans: Kindergarten Through 3rd GradeDocument40 pagesPedestrian Safety Lesson Plans: Kindergarten Through 3rd GradeWASABINo ratings yet
- ErrorsDocument4 pagesErrorsBenson Mwathi MungaiNo ratings yet
- 1 s2.0 S0386111218300591 MainDocument9 pages1 s2.0 S0386111218300591 Mainibnu nhNo ratings yet
- Panasonic CX 491 P Datasheet PDFDocument24 pagesPanasonic CX 491 P Datasheet PDFGanesh MandpeNo ratings yet
- RetroreflektometerDocument4 pagesRetroreflektometerRino IrawanNo ratings yet
- Leica Absolute Interferometer White Paper enDocument4 pagesLeica Absolute Interferometer White Paper entheflamebearerNo ratings yet
- 3M HIP Series 3930 - CALCOAST Report - 2020 With Weathering Test DataDocument21 pages3M HIP Series 3930 - CALCOAST Report - 2020 With Weathering Test DataHarshika Prasanganie AbeydeeraNo ratings yet
- Measurement of Retroreflective Pavement Marking Materials With CEN-Prescribed Geometry Using A Portable RetroreflectometerDocument7 pagesMeasurement of Retroreflective Pavement Marking Materials With CEN-Prescribed Geometry Using A Portable RetroreflectometerQriiz GuzmánNo ratings yet
- Vol 4 PDFDocument585 pagesVol 4 PDFAshish BhartiNo ratings yet
- Series: Self-Contained Photoelectric SensorDocument2 pagesSeries: Self-Contained Photoelectric SensorLuis Enrique Barreto GarciaNo ratings yet
- BS 873-1 - 1983Document26 pagesBS 873-1 - 1983ماقوري100% (1)
- Optical Sensors With Special Properties1Document17 pagesOptical Sensors With Special Properties1Csaba VargaNo ratings yet
- Built-In Power Supply Photoelectric SensorDocument16 pagesBuilt-In Power Supply Photoelectric SensorEdi PurwantoNo ratings yet
- IRC 35 - 2015 Code of Practice For Road Markings (R2)Document152 pagesIRC 35 - 2015 Code of Practice For Road Markings (R2)rajanikant77100% (5)
- JKR Roadwork Spec - JKR-SPJ-1988 PDFDocument270 pagesJKR Roadwork Spec - JKR-SPJ-1988 PDFFa Dyla100% (3)
- Ansi Asabe S261.7 Feb1989 (R2011)Document5 pagesAnsi Asabe S261.7 Feb1989 (R2011)StephanNo ratings yet
- Fhwasa14017 3Document53 pagesFhwasa14017 3indraandikapNo ratings yet
- ATJ 2E-87 Guide Signs (2011) PDFDocument164 pagesATJ 2E-87 Guide Signs (2011) PDFRohaya Isa100% (1)
- En 1463Document6 pagesEn 1463ElTestigoCarreteroNo ratings yet
- Embedment and Retroreflectivity of Drop-On Glass Spheres in Thermoplastic MarkingsDocument8 pagesEmbedment and Retroreflectivity of Drop-On Glass Spheres in Thermoplastic MarkingskvmahadevNo ratings yet
- In-Situ Gas AnalyzrDocument4 pagesIn-Situ Gas AnalyzrMuhammad AwaisNo ratings yet
- What Is Poka-YokeDocument114 pagesWhat Is Poka-YokeAdriano CarlosNo ratings yet