You might also like
- Fault Code 351 Injector Power Supply - Bad Intelligent Device or ComponentDocument9 pagesFault Code 351 Injector Power Supply - Bad Intelligent Device or ComponentAhmedmahNo ratings yet
- Types of Sensor and Their ApplicationDocument6 pagesTypes of Sensor and Their Applicationpogisimpatiko0% (1)
- Proximity Sensors Applications and Inductive Proximity Sensor OperationDocument59 pagesProximity Sensors Applications and Inductive Proximity Sensor OperationbenujahNo ratings yet
- Measurement Systems ExplainedDocument17 pagesMeasurement Systems ExplainedAtharva Soni100% (1)
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Proximity Sensors: by Subhransu MohapatraDocument14 pagesProximity Sensors: by Subhransu MohapatraSubhransu Mohapatra100% (1)
- Sensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithDocument7 pagesSensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithMaratur RoifahNo ratings yet
- Proximity SensorsDocument9 pagesProximity SensorsSONAL P JOSEPH 1561363No ratings yet
- Photo Voltaic CellDocument23 pagesPhoto Voltaic CellRakesh MohanachandranNo ratings yet
- Proximity Sensor Inductive, Capacitive Photoelectric.Document27 pagesProximity Sensor Inductive, Capacitive Photoelectric.Vikas KumarNo ratings yet
- SensorsDocument17 pagesSensorsDaystar YtNo ratings yet
- Proximity SensorDocument4 pagesProximity SensormunugotisumanthraoNo ratings yet
- Module 2Document61 pagesModule 2yashpalsingh80726No ratings yet
- Proximity SensorsDocument3 pagesProximity SensorsSaurabh SrivastavaNo ratings yet
- Detection of Hidden ObjectsDocument23 pagesDetection of Hidden ObjectsJeeva JeevaNo ratings yet
- Top 10 Sensors ExplainedDocument32 pagesTop 10 Sensors Explainednetra msajjanNo ratings yet
- DEE 3323.13 Sensor2Document88 pagesDEE 3323.13 Sensor2nabilo20No ratings yet
- Unit-2 Optical Sensors 2022Document55 pagesUnit-2 Optical Sensors 202217 CSE Lokesh VNo ratings yet
- Sensors PPT NotesDocument23 pagesSensors PPT NotesUday sonwaneNo ratings yet
- ProximityDocument16 pagesProximityvaalliiNo ratings yet
- UNIT_III_motion,_proximity,_ranging,_force,_magnetic_and_headingDocument84 pagesUNIT_III_motion,_proximity,_ranging,_force,_magnetic_and_headingAlemeNo ratings yet
- SENSORS Types and ClassificationsDocument5 pagesSENSORS Types and ClassificationsRoderick Rodaje Jr.No ratings yet
- Proximity Sensor: I. Prereading QuestionsDocument7 pagesProximity Sensor: I. Prereading QuestionsPamungkasNo ratings yet
- Opto-electronic Sensors GuideDocument30 pagesOpto-electronic Sensors Guidediegob_2No ratings yet
- Encoders and Proximity Sensors Explained: Optical Encoder, Inductive Proximity Sensor & Capacitive Proximity SensorDocument28 pagesEncoders and Proximity Sensors Explained: Optical Encoder, Inductive Proximity Sensor & Capacitive Proximity SensorManikandan SNo ratings yet
- Proximity Technology: How Inductive Sensors WorkDocument7 pagesProximity Technology: How Inductive Sensors WorkNavyaNo ratings yet
- Mada8 6Document38 pagesMada8 6Himanshu JaiswalNo ratings yet
- What Is A SensorDocument17 pagesWhat Is A SensorPatil Amol PandurangNo ratings yet
- Elements of Technology (Eot) : Assignment 3Document38 pagesElements of Technology (Eot) : Assignment 3nikitaNo ratings yet
- Chapter 2 Logical SensorDocument33 pagesChapter 2 Logical SensorMuhammad AniqNo ratings yet
- Position, Proximity and Motion Sensor: Prepared byDocument27 pagesPosition, Proximity and Motion Sensor: Prepared bySpidy PoudelNo ratings yet
- Transducer and SensorDocument92 pagesTransducer and SensorFemi PrinceNo ratings yet
- Proximity Sensor: Name: Tarun Kumar VTU No.: 14026 Subject: Sensor and ActuatorsDocument8 pagesProximity Sensor: Name: Tarun Kumar VTU No.: 14026 Subject: Sensor and ActuatorsTarun KumarNo ratings yet
- WINSEM2021-22 BECE101L TH VL2021220505673 Reference Material I 09-06-2022 Module 7.4 25Document20 pagesWINSEM2021-22 BECE101L TH VL2021220505673 Reference Material I 09-06-2022 Module 7.4 25gfdffggsNo ratings yet
- Sensors Used in Robotics: Instituto Tecnológico Superior de HuichapanDocument41 pagesSensors Used in Robotics: Instituto Tecnológico Superior de HuichapanLuis Ángel Ramírez NavaNo ratings yet
- What Is The Difference Between Inductive and Capacitive SensorsDocument2 pagesWhat Is The Difference Between Inductive and Capacitive SensorsAnonymous AyCl4L0% (1)
- Photoelectric Sensor SolutionsDocument13 pagesPhotoelectric Sensor SolutionsHa RbNo ratings yet
- Sensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionDocument15 pagesSensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionKram Alim VillonNo ratings yet
- Behaviour of Inductive and Capacitive Proximity SensorsDocument3 pagesBehaviour of Inductive and Capacitive Proximity SensorsrajaNo ratings yet
- Notes - Unit - 4Document25 pagesNotes - Unit - 4shubhtrip4No ratings yet
- Proximity SensorDocument3 pagesProximity SensorRzkymlnaNo ratings yet
- SENSOR in RoboticsDocument20 pagesSENSOR in RoboticsAlawy FoulyNo ratings yet
- What Is A Proximity Sensor Used ForDocument13 pagesWhat Is A Proximity Sensor Used ForjackNo ratings yet
- Electronic Component Computer Processor Light Computer Tactile SensorDocument6 pagesElectronic Component Computer Processor Light Computer Tactile SensorFrezer BelayNo ratings yet
- Robotics Unit3 SensorsDocument120 pagesRobotics Unit3 SensorsJanarthanan BalakrishnasamyNo ratings yet
- C08 Rme PPT1 21221Document45 pagesC08 Rme PPT1 21221DHANANJAY VIJAYKUMAR BILENo ratings yet
- Proximity SensorsDocument8 pagesProximity SensorsSabir AhmedNo ratings yet
- 4 SensorsDocument39 pages4 SensorsmkpqNo ratings yet
- Contactless Liquid Level ControllerDocument5 pagesContactless Liquid Level ControllerRyan Christian NantesNo ratings yet
- Digital Assignment-1 Explains Different Types of SensorsDocument3 pagesDigital Assignment-1 Explains Different Types of SensorsSanjana SehrawatNo ratings yet
- Unit4 ArduinoDocument66 pagesUnit4 Arduinorupesh3655No ratings yet
- 06 Chapter+6 SensorsDocument92 pages06 Chapter+6 Sensorsபுருஷோத்தமன் ரவீந்திரன்No ratings yet
- Capacitive - As The Name Indicates, These Sensors Operate by Noting A Change in TheDocument4 pagesCapacitive - As The Name Indicates, These Sensors Operate by Noting A Change in TheMc King Stephen NagutomNo ratings yet
- Xee Oe1 Unit 3Document112 pagesXee Oe1 Unit 3Vigha Omnica IyerNo ratings yet
- Unit 2 - Ultrasonic and Touch SensorsDocument30 pagesUnit 2 - Ultrasonic and Touch Sensorsviren mallyaNo ratings yet
- Mechatronics & Robotics: Proximity Sensors ExplainedDocument21 pagesMechatronics & Robotics: Proximity Sensors ExplainedYupniatsNo ratings yet
- Fundamentals of Photoelectric SensorsDocument6 pagesFundamentals of Photoelectric SensorsKimo KimoNo ratings yet
- Classification of Sensors: Unit - 1 Presented by Mrs.M.P.SasirekhaDocument37 pagesClassification of Sensors: Unit - 1 Presented by Mrs.M.P.SasirekhaSasirekha KosalramNo ratings yet
- Amrrrrrrrrrrrr MnssDocument8 pagesAmrrrrrrrrrrrr MnssAmr MansourNo ratings yet
- University of the East Mechanical Engineering Position and Motion Sensor Document ReviewDocument16 pagesUniversity of the East Mechanical Engineering Position and Motion Sensor Document ReviewJOHNEDERSON PABLONo ratings yet
- Photo Electric SensorsDocument33 pagesPhoto Electric SensorsBharathprabhu100% (2)
- Measurement & Sensors: Motion and PositionDocument18 pagesMeasurement & Sensors: Motion and PositionAtharva SoniNo ratings yet
- Smart Sensors and Motion Detection with PIR and MPU6050Document15 pagesSmart Sensors and Motion Detection with PIR and MPU6050Atharva SoniNo ratings yet
- Measurement and Sensors - Lecture3Document19 pagesMeasurement and Sensors - Lecture3Atharva SoniNo ratings yet
- Measurement and sensors: Understanding static and dynamic instrument characteristicsDocument12 pagesMeasurement and sensors: Understanding static and dynamic instrument characteristicsAtharva SoniNo ratings yet
- Op-Amps and Linear Integrated Circuits..Gayakwad by EasyEngineering - Net - CompressedDocument553 pagesOp-Amps and Linear Integrated Circuits..Gayakwad by EasyEngineering - Net - CompressedAtharva SoniNo ratings yet
- Lab 5 BPSK - Binary Phase Shift KeyingDocument5 pagesLab 5 BPSK - Binary Phase Shift KeyingNo_pidas_CCH_ni_prepa_unamNo ratings yet
- Series-Parallel Circuit AnalysisDocument3 pagesSeries-Parallel Circuit AnalysisMarianneIvon AndayaNo ratings yet
- Block Diagram of PNADocument20 pagesBlock Diagram of PNADuncan LauNo ratings yet
- Midea Dehumidifier Service ManualDocument28 pagesMidea Dehumidifier Service ManualStanescu MarianNo ratings yet
- Specifications For: 11Kv Pad Mounted SwitchDocument8 pagesSpecifications For: 11Kv Pad Mounted SwitchFarhan ShahNo ratings yet
- электропроводка DEFENDER - 07 - VIN - 732617Document82 pagesэлектропроводка DEFENDER - 07 - VIN - 732617DMNo ratings yet
- Effects of Harmonics On Power SystemsDocument8 pagesEffects of Harmonics On Power SystemsHassan AliNo ratings yet
- HE190067Document2 pagesHE190067Jean TorresNo ratings yet
- Actividad4-Three Circuit Construction Lab Activities PDFDocument12 pagesActividad4-Three Circuit Construction Lab Activities PDFValentina Tascon MontoyaNo ratings yet
- Manual de Probador de Alternador, Arranque y BateríaDocument42 pagesManual de Probador de Alternador, Arranque y BateríaLuis SoporteNo ratings yet
- Smart Baby SitterDocument6 pagesSmart Baby SittermohitNo ratings yet
- OEM Electricity Revisi#1Document6 pagesOEM Electricity Revisi#1EndraNo ratings yet
- BT169D 527397Document14 pagesBT169D 527397Fazli TeknikNo ratings yet
- Luna2000-5-S0 Cert N8aDocument1 pageLuna2000-5-S0 Cert N8acatalinnnspinuuuNo ratings yet
- BTECH2017ECDocument44 pagesBTECH2017ECNeelesh GautamNo ratings yet
- Simulation: Definition, Motivation: Simulation: To Construct and Test A ComputerDocument23 pagesSimulation: Definition, Motivation: Simulation: To Construct and Test A ComputerNaty MatNo ratings yet
- SICK Datasheet - WL9-2N131 - 1018286 - enDocument5 pagesSICK Datasheet - WL9-2N131 - 1018286 - enLuis DíazNo ratings yet
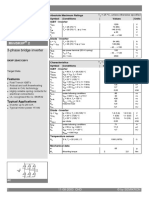
- Skiip 25Ac126V1: Miniskiip 2Document4 pagesSkiip 25Ac126V1: Miniskiip 2Max TeleNo ratings yet
- Differences between VSI and CSI converter operation modesDocument1 pageDifferences between VSI and CSI converter operation modesSushil NamoijamNo ratings yet
- 8-Acti 9 Catalogue 2012 For Gulf and KSADocument36 pages8-Acti 9 Catalogue 2012 For Gulf and KSAnooruddinkhan1No ratings yet
- Oscilla - Excellence Since 1960Document24 pagesOscilla - Excellence Since 1960Pau Choon HockNo ratings yet
- Course Plan DLD-2020Document16 pagesCourse Plan DLD-2020Muhammad AsadNo ratings yet
- FM600BLFDocument3 pagesFM600BLFRemy MendozaNo ratings yet
- VHS Test and Calibrate 539B CDocument36 pagesVHS Test and Calibrate 539B CJennifer EdwardsNo ratings yet
- Single-And Multiple-Stage Cascaded Vapor Compression Refrigeration For Electronics CoolingDocument97 pagesSingle-And Multiple-Stage Cascaded Vapor Compression Refrigeration For Electronics CoolingAnn Loching NebabNo ratings yet
- R.Ostojic, J. Levi, Use of Micro-Ohm Meter As A Power Source For DRM Testing On Dead Tank Circuit BreakersDocument10 pagesR.Ostojic, J. Levi, Use of Micro-Ohm Meter As A Power Source For DRM Testing On Dead Tank Circuit BreakersMartin FabianNo ratings yet
- Amateur Radio Magazin 01 - January - 1975 PDFDocument164 pagesAmateur Radio Magazin 01 - January - 1975 PDFJoão Pedro AlmeidaNo ratings yet
- Level 6 - Test: Theme 9: The FutureDocument3 pagesLevel 6 - Test: Theme 9: The Futurethanh trung LeNo ratings yet
- MCC Commercial Surface Mount Package Dimensions GuideDocument4 pagesMCC Commercial Surface Mount Package Dimensions GuideAlexsander MeloNo ratings yet