You might also like
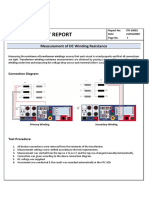
- Test Report: Measurement of DC Winding ResistanceDocument2 pagesTest Report: Measurement of DC Winding ResistanceJRC TestingNo ratings yet
- iEWD RANG ROVER EVOQUE 2013Document210 pagesiEWD RANG ROVER EVOQUE 2013Олег олег100% (3)
- Robotic ArmDocument9 pagesRobotic ArmRohit KumarNo ratings yet
- Pre Installation PDFDocument27 pagesPre Installation PDFmarius vasile100% (1)
- Ehv - Dewa Handbook 2020 enDocument58 pagesEhv - Dewa Handbook 2020 enKuttu byjuNo ratings yet
- AN044 Robotic ArmDocument9 pagesAN044 Robotic Armhussien amare100% (1)
- GFX 750 Display System ManualDocument11 pagesGFX 750 Display System ManualVicktor LimaNo ratings yet
- Warranty Processing Recall BBPDocument19 pagesWarranty Processing Recall BBPvinay_kulkarni100% (1)
- Pick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeDocument4 pagesPick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeBilvanadham NNo ratings yet
- Pick and Place Robotic Arm Using PLC IJERTV8IS080268 PDFDocument4 pagesPick and Place Robotic Arm Using PLC IJERTV8IS080268 PDFDinesh PanickerNo ratings yet
- Control ValveDocument58 pagesControl ValveNIKHIL SHINDENo ratings yet
- Alstom's Flexible Supercritical PowerDocument34 pagesAlstom's Flexible Supercritical PowerelrajilNo ratings yet
- Calibrador Electrico FLUKE 5502A CatalogoDocument22 pagesCalibrador Electrico FLUKE 5502A CatalogoJavier AguilarNo ratings yet
- Pneumatic Powered Metal Pick and Place Arm SynopsisDocument31 pagesPneumatic Powered Metal Pick and Place Arm SynopsisBoopathi Kalai50% (2)
- Pick and Place Robot Report New Edited2Document19 pagesPick and Place Robot Report New Edited2Kshitij BandarNo ratings yet
- BT6604 Cre PDFDocument56 pagesBT6604 Cre PDFNIKHIL SHINDENo ratings yet
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNo ratings yet
- The Design and Development of An Omni-Directional Mobile Robot Oriented To An Intelligent Manufacturing SystemDocument15 pagesThe Design and Development of An Omni-Directional Mobile Robot Oriented To An Intelligent Manufacturing SystemIbrahimNo ratings yet
- Robô Pêndulo 2 Rodas - 1Document7 pagesRobô Pêndulo 2 Rodas - 1Victor PassosNo ratings yet
- Practical Development of An Experimental PDFDocument9 pagesPractical Development of An Experimental PDFharold medina martinezNo ratings yet
- Research Paper 1Document6 pagesResearch Paper 1vishnubaghel40No ratings yet
- Smart Spider Autonomous Self Driven in LDocument7 pagesSmart Spider Autonomous Self Driven in LAttila NagyNo ratings yet
- Design and Fabrication of X-Y Gantry Mechanism Using Python A ReviewDocument6 pagesDesign and Fabrication of X-Y Gantry Mechanism Using Python A ReviewIJRASETPublicationsNo ratings yet
- Design and Manufacturing of Magnetic Climbing RobotDocument23 pagesDesign and Manufacturing of Magnetic Climbing RobotSushant VanveNo ratings yet
- Dynamic of Two Wheeled RobotDocument35 pagesDynamic of Two Wheeled RobotMartino Ojwok AjangnayNo ratings yet
- Amphibious Robot II PDFDocument6 pagesAmphibious Robot II PDFAman TripathiNo ratings yet
- Automatic Vehicle Washing System Using Programmable Logic ControllerDocument4 pagesAutomatic Vehicle Washing System Using Programmable Logic ControllerGhilman HabibNo ratings yet
- Design and Analysis of A Mobile Robot For Storage and Retrieval SystemDocument9 pagesDesign and Analysis of A Mobile Robot For Storage and Retrieval SystemRudy YoussefNo ratings yet
- Introduction To Motion Control TechnologyDocument3 pagesIntroduction To Motion Control TechnologyAkshaya AgarwalNo ratings yet
- Balancing RobotDocument5 pagesBalancing RobotMilton MuñozNo ratings yet
- Automatic Multilevel Car Parking & Controlling System Using PLCDocument3 pagesAutomatic Multilevel Car Parking & Controlling System Using PLCAnonymous kw8Yrp0R5r0% (1)
- 0620Document7 pages0620Shahrzad GhasemiNo ratings yet
- 1 s2.0 S0094114X2200163X MainDocument31 pages1 s2.0 S0094114X2200163X Mainkurts010No ratings yet
- Design and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakeDocument4 pagesDesign and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakePreeti BhamreNo ratings yet
- Self-Balancing Two-WheelerDocument5 pagesSelf-Balancing Two-WheelerVIVA-TECH IJRINo ratings yet
- 1RV18CV019 PPT InternDocument36 pages1RV18CV019 PPT InternAVIRAL ROYNo ratings yet
- Encoder-Free Odometric System For Autonomous MicrorobotsDocument11 pagesEncoder-Free Odometric System For Autonomous MicrorobotsSergeNo ratings yet
- Electrical Inspection and Autometed Robot For Electrical Transmission Line InspectionDocument5 pagesElectrical Inspection and Autometed Robot For Electrical Transmission Line InspectionIJRASETPublicationsNo ratings yet
- Project Title...Document7 pagesProject Title...Abhishek ShahNo ratings yet
- Design and Development of Rope Climbing DeviceDocument4 pagesDesign and Development of Rope Climbing Devicelaukik_rautNo ratings yet
- Thesis Motor ControlDocument6 pagesThesis Motor Controlmarygregoryfortwayne100% (2)
- Reverse Locking MechanismDocument34 pagesReverse Locking Mechanism123 456No ratings yet
- ACP-Incorporated Perturbation-Resistant Neural Dynamics Controller For Autonomous VehiclesDocument12 pagesACP-Incorporated Perturbation-Resistant Neural Dynamics Controller For Autonomous Vehiclesthanhtan_tvuNo ratings yet
- Design Analysis of A Remote Controlled P PDFDocument12 pagesDesign Analysis of A Remote Controlled P PDFVũ Mạnh CườngNo ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Design and Analysis of An Articulated Robot ArmDocument8 pagesDesign and Analysis of An Articulated Robot ArmSamuel AbraghamNo ratings yet
- Cai 4th PDFDocument3 pagesCai 4th PDFJoao CarvalhoNo ratings yet
- Omni Wheels Robot For Effective Surveillance and Transportation PurposeDocument8 pagesOmni Wheels Robot For Effective Surveillance and Transportation PurposeIJRASETPublicationsNo ratings yet
- Video 8Document16 pagesVideo 8Neural NetNo ratings yet
- A Mecanum Wheel Based Robot Platform For Warehouse AutomationDocument10 pagesA Mecanum Wheel Based Robot Platform For Warehouse AutomationShekhar SharmaNo ratings yet
- Conference Template A4Document6 pagesConference Template A4Angeline LaresmaNo ratings yet
- A Performance-Driven MPC Algorithm For Underactuated Bridge CranesDocument17 pagesA Performance-Driven MPC Algorithm For Underactuated Bridge CranesGogyNo ratings yet
- Automation and Robotics Week 08 Theory Notes 20ME51IDocument18 pagesAutomation and Robotics Week 08 Theory Notes 20ME51IThanmay JSNo ratings yet
- 63 May2020Document7 pages63 May2020AravindNo ratings yet
- ProjectDocument22 pagesProjectsingh.suraj885150No ratings yet
- Project Segway 3 WheelDocument26 pagesProject Segway 3 WheelMohit ChetwaniNo ratings yet
- VMKV Engineering College, Salem Aeronautical Engineering Course Elective - Robotics Engineering - Question Bank 2012 RegulationDocument16 pagesVMKV Engineering College, Salem Aeronautical Engineering Course Elective - Robotics Engineering - Question Bank 2012 RegulationGaurav MullickNo ratings yet
- Design and Control of Mobile Robot With Mecanum Wheel: September 2009Document7 pagesDesign and Control of Mobile Robot With Mecanum Wheel: September 2009Vishal KashyapNo ratings yet
- PLC and Hmi For Conveyor Monitoring and Fault DetectionDocument5 pagesPLC and Hmi For Conveyor Monitoring and Fault DetectionIJAR JOURNALNo ratings yet
- JETIRFA06001Document5 pagesJETIRFA06001Trần ĐạtNo ratings yet
- 25905608-Design and Development of Three Arms Transmission Line Inspection RobotDocument4 pages25905608-Design and Development of Three Arms Transmission Line Inspection RobotRashtra BhushanNo ratings yet
- Mobile Robot Control Using Bond Graph and Flatness Based Approach Mobile Robot Control Using Bond Graph and Flatness Based ApproachDocument9 pagesMobile Robot Control Using Bond Graph and Flatness Based Approach Mobile Robot Control Using Bond Graph and Flatness Based ApproachmlmlNo ratings yet
- Modelling, Simulation & Control Design of Omnibot Using Reaction Wheel PrincipleDocument6 pagesModelling, Simulation & Control Design of Omnibot Using Reaction Wheel PrincipleVIVA-TECH IJRINo ratings yet
- Mechatronic Design of A Four Wheel Steering Mobile Robot With Fault-Tolerant Odometry FeedbackDocument7 pagesMechatronic Design of A Four Wheel Steering Mobile Robot With Fault-Tolerant Odometry FeedbackharishNo ratings yet
- Mechatronics-Based Waste Collection and Disposal SystemDocument7 pagesMechatronics-Based Waste Collection and Disposal SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Carry LoadDocument9 pagesCarry LoadJohn WellNo ratings yet
- Pick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeDocument4 pagesPick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeBilvanadham NNo ratings yet
- Tracking Control 3 Omni Wheel ModelDocument15 pagesTracking Control 3 Omni Wheel ModelRangga NaufalNo ratings yet
- Evolvable Mechanics Hardware Tools For Evolutionary RoboticsDocument7 pagesEvolvable Mechanics Hardware Tools For Evolutionary Roboticsdinu petreNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Extractive Distillation of Toluene & Methylcyclohexane Using PhenolDocument2 pagesExtractive Distillation of Toluene & Methylcyclohexane Using PhenolNIKHIL SHINDENo ratings yet
- Optimization of Output Fluctuation For The Model of Non-Ideal CSTR'S in Series With A Sinusoidal Input of ConcentrationDocument7 pagesOptimization of Output Fluctuation For The Model of Non-Ideal CSTR'S in Series With A Sinusoidal Input of ConcentrationNIKHIL SHINDENo ratings yet
- Forced Convective Heat Transfer Across A Pin Fin Micro Heat SinkDocument13 pagesForced Convective Heat Transfer Across A Pin Fin Micro Heat SinkNIKHIL SHINDENo ratings yet
- Reactor Modeling Tools An Overview PDFDocument23 pagesReactor Modeling Tools An Overview PDFNIKHIL SHINDENo ratings yet
- CATIATHON Problem Statement - 1Document4 pagesCATIATHON Problem Statement - 1NIKHIL SHINDENo ratings yet
- On Controlling An Autothermal Fixed-Bed Reactor at An Unstable State-IvDocument15 pagesOn Controlling An Autothermal Fixed-Bed Reactor at An Unstable State-IvNIKHIL SHINDENo ratings yet
- Analytica Chimica ActaDocument9 pagesAnalytica Chimica ActaNIKHIL SHINDENo ratings yet
- Impact of Fluid Flow On Free Radical Polymerization in A Batch ReactorDocument26 pagesImpact of Fluid Flow On Free Radical Polymerization in A Batch ReactorNIKHIL SHINDENo ratings yet
- Energy Sources Volume 18 Issue 4 1996 (Doi 10.1080 - 00908319608908781) KHATTAB, N. M. - Toward A Homogeneous and Efficient Batch-Tray Dryer PDFDocument14 pagesEnergy Sources Volume 18 Issue 4 1996 (Doi 10.1080 - 00908319608908781) KHATTAB, N. M. - Toward A Homogeneous and Efficient Batch-Tray Dryer PDFNIKHIL SHINDENo ratings yet
- Finite Element Analysis On Horizontal Vessels With Saddle SupportsDocument9 pagesFinite Element Analysis On Horizontal Vessels With Saddle SupportsNIKHIL SHINDENo ratings yet
- Design and Implementation of A Robotic Arm Using Ros and Moveit!Document6 pagesDesign and Implementation of A Robotic Arm Using Ros and Moveit!NIKHIL SHINDENo ratings yet
- 6-Dof Pc-Based Robotic Arm (Pc-Roboarm) With Efficient Trajectory Planning and Speed ControlDocument7 pages6-Dof Pc-Based Robotic Arm (Pc-Roboarm) With Efficient Trajectory Planning and Speed ControlNIKHIL SHINDENo ratings yet
- Keyboard-Based Control and Simulation of 6-DOF Robotic Arm Using ROSDocument5 pagesKeyboard-Based Control and Simulation of 6-DOF Robotic Arm Using ROSNIKHIL SHINDENo ratings yet
- Finite Element Method (FEM) & Its Engineering Applications: AICTE Sponsored Under The Aegis Teqip IiiDocument2 pagesFinite Element Method (FEM) & Its Engineering Applications: AICTE Sponsored Under The Aegis Teqip IiiNIKHIL SHINDENo ratings yet
- Meenakshi Reddy 2018 IOP Conf. Ser. Earth Environ. Sci. 164 012010 PDFDocument7 pagesMeenakshi Reddy 2018 IOP Conf. Ser. Earth Environ. Sci. 164 012010 PDFNIKHIL SHINDENo ratings yet
- Exam Questions AZ-900: Microsoft Azure FundamentalsDocument6 pagesExam Questions AZ-900: Microsoft Azure FundamentalsrajivNo ratings yet
- Pve Admin GuideDocument495 pagesPve Admin GuideNarkhiss TaNo ratings yet
- BU480 E-Business StrategyDocument45 pagesBU480 E-Business StrategyG JhaNo ratings yet
- PF2016 CompanyProfile enDocument1 pagePF2016 CompanyProfile enOscar Eduardo CasillaNo ratings yet
- Manual Gigabyte GA-MA 790 GP-UD4HDocument104 pagesManual Gigabyte GA-MA 790 GP-UD4HRonnie GamerNo ratings yet
- Terminal Exam, Program BSCS (5) Computer Communication and Networks CUI ATTOCK CampusDocument11 pagesTerminal Exam, Program BSCS (5) Computer Communication and Networks CUI ATTOCK CampusRage GamingNo ratings yet
- SN3500 SN4500 DB Update Instructions B PDFDocument20 pagesSN3500 SN4500 DB Update Instructions B PDFSamuel RussoNo ratings yet
- Black and Green Modern Social Media Marketing Trends PresentationDocument25 pagesBlack and Green Modern Social Media Marketing Trends PresentationGerhard BothaNo ratings yet
- The Concept of Renewable Energy Power System For Rural ElectrificationDocument9 pagesThe Concept of Renewable Energy Power System For Rural ElectrificationKamilu LawalNo ratings yet
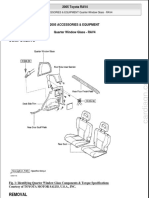
- Components: 2005 Toyota RAV4 2005 Toyota RAV4Document14 pagesComponents: 2005 Toyota RAV4 2005 Toyota RAV4Sonny RaymundoNo ratings yet
- VxRail 7.0.XXX Administration Participant GuideDocument318 pagesVxRail 7.0.XXX Administration Participant GuideEdin HodzicNo ratings yet
- 8-Channel Source Driver With Over-Current ProtectionDocument8 pages8-Channel Source Driver With Over-Current ProtectionNigromante_01No ratings yet
- For Ticket WAPS 966 & WAPS 788 Service Name: User-Report-Service 1) Description of The IssueDocument4 pagesFor Ticket WAPS 966 & WAPS 788 Service Name: User-Report-Service 1) Description of The IssuemanthanNo ratings yet
- ZestawienieDocument2 pagesZestawienieMaksymilian NowakNo ratings yet
- Mechanical Fuel Injection2Document2 pagesMechanical Fuel Injection2AjitKumarPandeyNo ratings yet
- Self Curing Concrete CivilDocument34 pagesSelf Curing Concrete CivilAshutosh SinghNo ratings yet
- Intro ScannerDocument7 pagesIntro Scannerapi-298810403No ratings yet
- UntitledDocument2 pagesUntitledCM 003 Shanthan AbbojuNo ratings yet
- Worked Example To Eurocode 2 Vol 1Document228 pagesWorked Example To Eurocode 2 Vol 1Mohd RafiqNo ratings yet
- Service Manual: Blues Junior™ IiiDocument14 pagesService Manual: Blues Junior™ IiiFederico AbellaNo ratings yet
- Ym258hk 3TN82-RHKDocument79 pagesYm258hk 3TN82-RHKSAMNo ratings yet
- INDUSTREX Digital Viewing Software Version 3.5: Better Systems For A Better BusinessDocument2 pagesINDUSTREX Digital Viewing Software Version 3.5: Better Systems For A Better BusinesscarlosNo ratings yet