You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Smoke Control Practice in MalaysiaDocument5 pagesSmoke Control Practice in MalaysiaZacharul Shah100% (2)
- College of Sciences Department of Physics Suggested Program of StudyDocument2 pagesCollege of Sciences Department of Physics Suggested Program of StudyTakeshi ShingenNo ratings yet
- Mymathlab User Guide: For StudentsDocument9 pagesMymathlab User Guide: For StudentsTakeshi ShingenNo ratings yet
- WorkbookPre Algebra PDFDocument119 pagesWorkbookPre Algebra PDFTakeshi ShingenNo ratings yet
- Geometric SketpatchDocument3 pagesGeometric SketpatchTakeshi ShingenNo ratings yet
- F 15 EagleDocument21 pagesF 15 EagleTakeshi ShingenNo ratings yet
- ReferenceDocument2 pagesReferenceTakeshi ShingenNo ratings yet
- Lecture Notes - Optimization and Control PDFDocument405 pagesLecture Notes - Optimization and Control PDFShabih Ul HasanNo ratings yet
- Pythagoras Theorem IzaanDocument4 pagesPythagoras Theorem IzaanFazeen FaisalNo ratings yet
- Continuous Probability DistributionsDocument51 pagesContinuous Probability DistributionsDUNG HO PHAM PHUONGNo ratings yet
- 08 Chapter1Document41 pages08 Chapter1AndrewScotson100% (1)
- Measurement During The Mesopotamian EraDocument5 pagesMeasurement During The Mesopotamian EraKenji TateNo ratings yet
- Resistance Welding ProcessesDocument47 pagesResistance Welding ProcessesJohan ZraghozNo ratings yet
- Mechanical ActuatorsDocument19 pagesMechanical Actuatorsjasonmani90100% (1)
- Theory of The Faraday and Kerr Effects in FerromagneticsDocument12 pagesTheory of The Faraday and Kerr Effects in FerromagneticsPeter RichterNo ratings yet
- Enriquez Rovie C. ThermochemistryDocument9 pagesEnriquez Rovie C. ThermochemistryENRIQUEZ, ROVIE C.No ratings yet
- 2008 H2 Chem Prelim P1 PDFDocument15 pages2008 H2 Chem Prelim P1 PDFEvelyn LimNo ratings yet
- Maths 1Document20 pagesMaths 1Priyanshi BhattarNo ratings yet
- Extraction of Natural Dye From Ficus Cunia and Dyeing of Different FabricsDocument6 pagesExtraction of Natural Dye From Ficus Cunia and Dyeing of Different FabricsHaco Chinedu ObasiNo ratings yet
- Advancements in Tools Used While LoggingDocument38 pagesAdvancements in Tools Used While LoggingSudeep Chandra VarmaNo ratings yet
- Cambridge IGCSE: MATHEMATICS 0580/42Document20 pagesCambridge IGCSE: MATHEMATICS 0580/42spotifysubs250No ratings yet
- Guyver Class TemplateDocument4 pagesGuyver Class TemplateLoren DeerwesterNo ratings yet
- 3D Basin and Petroleum System Modelling of Northern North SeaDocument17 pages3D Basin and Petroleum System Modelling of Northern North SeawahyuNo ratings yet
- HFW60T5Document13 pagesHFW60T5Md MoniruzzamanNo ratings yet
- Formular Formula - HTMDocument3 pagesFormular Formula - HTMTomy GeorgeNo ratings yet
- H100K H100KS ChannelDocument2 pagesH100K H100KS Channeldonaji123No ratings yet
- Basic BJT Operation and BiasingDocument59 pagesBasic BJT Operation and BiasingangenghuatNo ratings yet
- Soil Mechanics - Problem Set 1Document2 pagesSoil Mechanics - Problem Set 1Ayban Dela CruzNo ratings yet
- Stress Field Approach For Prediction of End ConcreDocument30 pagesStress Field Approach For Prediction of End ConcreDoua AbdouNo ratings yet
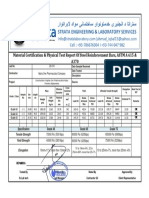
- Material Certification & Physical Test Report of Steel Reinforcement Bars, ASTM A 615 & A370Document1 pageMaterial Certification & Physical Test Report of Steel Reinforcement Bars, ASTM A 615 & A370Nasrullah Fazal AdeebNo ratings yet
- Is 3464Document28 pagesIs 3464JGD123No ratings yet
- Implicit Differentiation: 1. ExampleDocument3 pagesImplicit Differentiation: 1. ExampleakilNo ratings yet
- A Note On CLT GroupsDocument4 pagesA Note On CLT Groupsap021No ratings yet
- PHA19-028 Klucel EXF SellSheet A4 spotWG9 MsDocument2 pagesPHA19-028 Klucel EXF SellSheet A4 spotWG9 MsGisella BrenisNo ratings yet
- Year 6 Scienec For CES WorksheetDocument8 pagesYear 6 Scienec For CES WorksheetRhieza Perez Umandal100% (3)
- 2nd Summative Test in Mathematics (q3)Document1 page2nd Summative Test in Mathematics (q3)she100% (1)