You might also like
- LCL Filter DesignDocument22 pagesLCL Filter DesignZunAib Ali100% (1)
- Reactive Power and Harmonic Filter - ABBDocument49 pagesReactive Power and Harmonic Filter - ABBpongpumNo ratings yet
- An3166 PDFDocument10 pagesAn3166 PDFJonathan JaegerNo ratings yet
- Design Principles For Low-Voltage Low-Power Analog Integrated CircuitsDocument37 pagesDesign Principles For Low-Voltage Low-Power Analog Integrated Circuitsvinai2086No ratings yet
- Basic Calculation of A Boost Converter's Power StageDocument9 pagesBasic Calculation of A Boost Converter's Power Stagexuanvan1303No ratings yet
- PFC ConverterDocument17 pagesPFC ConverterSandeep Guha NiyogiNo ratings yet
- Operational Amplifier Applications - Wikipedia, The Free EncyclopediaDocument15 pagesOperational Amplifier Applications - Wikipedia, The Free Encyclopediaranscrib300100% (1)
- Short-Circuit Calculations: 4.1 Symmetrical ComponentsDocument21 pagesShort-Circuit Calculations: 4.1 Symmetrical ComponentsYahya GharbiNo ratings yet
- Requirement of Current Transformer in MicomDocument8 pagesRequirement of Current Transformer in MicomnmanikandanNo ratings yet
- Slva 477 BDocument8 pagesSlva 477 BAnonymous QakmLc3kTINo ratings yet
- The Analysis and Detection of Single-Line-ground Fault in Ungrounded Solar PlantDocument4 pagesThe Analysis and Detection of Single-Line-ground Fault in Ungrounded Solar PlantGundeboyina GopiNo ratings yet
- BJT Small Signal Analysis Part 1Document61 pagesBJT Small Signal Analysis Part 1MUHAMMAD SMITHNo ratings yet
- Design and Simulation of Power Factor Correction Boost Converter Using Hysteresis ControlDocument5 pagesDesign and Simulation of Power Factor Correction Boost Converter Using Hysteresis ControlEditor IJTSRDNo ratings yet
- EMI Conducted InterferenceDocument12 pagesEMI Conducted Interferencee175470_rmqkr_netNo ratings yet
- CH 05Document40 pagesCH 05miathegirl9No ratings yet
- Simulation and Analysis of LLC Resonant Converter Using Closed Loop PI ControllerDocument3 pagesSimulation and Analysis of LLC Resonant Converter Using Closed Loop PI ControllerijaertNo ratings yet
- Prekidačka NapajanjaDocument48 pagesPrekidačka NapajanjaDamir PranjkovicNo ratings yet
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesSwitch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipGhulam AbbasNo ratings yet
- A Control Method To Damp Oscillation in The Input LCL - 2002Document6 pagesA Control Method To Damp Oscillation in The Input LCL - 2002Jadyson SilvaNo ratings yet
- PN Junction DiodeDocument55 pagesPN Junction DiodeMonika SharmaNo ratings yet
- Guia de Diseño de FuentesDocument6 pagesGuia de Diseño de Fuentestu_novia_nos_enganiaNo ratings yet
- Diseño de Fuente de AlimentaciónDocument6 pagesDiseño de Fuente de Alimentaciónhector Miranda BernalNo ratings yet
- Reference - DC System Short CircuitDocument13 pagesReference - DC System Short Circuitangel lozadaNo ratings yet
- Application of Zig-Zag Transformers in A Three-Wire Three-Phase Dynamic Sag Corrector SystemDocument6 pagesApplication of Zig-Zag Transformers in A Three-Wire Three-Phase Dynamic Sag Corrector SystemDolisirNo ratings yet
- Analog Fault DerivationDocument89 pagesAnalog Fault DerivationSachidananda SwarNo ratings yet
- Module 4 18ELN14Document20 pagesModule 4 18ELN14RickyNo ratings yet
- Self-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionDocument11 pagesSelf-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionJie99No ratings yet
- Differential ProtectionDocument57 pagesDifferential ProtectionProsper Shumba100% (8)
- V.I.P. Dasanayake CapacitanceDocument5 pagesV.I.P. Dasanayake CapacitanceIsuru Pasan Dasanayake100% (1)
- Power Factor Correction (PFC) BasicsDocument11 pagesPower Factor Correction (PFC) Basicsaakici100% (1)
- Regulated DC Power Supply Lab AssignmentDocument17 pagesRegulated DC Power Supply Lab AssignmentSebastien Paul100% (1)
- UJTTDocument8 pagesUJTTJagdeep SinghNo ratings yet
- Application of Trans Z-Source Inverter in Photovoltaic SystemsDocument6 pagesApplication of Trans Z-Source Inverter in Photovoltaic SystemsMohamed BenziadaNo ratings yet
- Calculation of Reference Values:: Ref Ref, A/ B Nom A/bDocument7 pagesCalculation of Reference Values:: Ref Ref, A/ B Nom A/bTufail AlamNo ratings yet
- Charge Pump Circuit Concept For Single-Phase Transformerless Inverter With Fuzzy Logic Controller For Grid-Tied PV ApplicationsDocument14 pagesCharge Pump Circuit Concept For Single-Phase Transformerless Inverter With Fuzzy Logic Controller For Grid-Tied PV Applicationssandeep sNo ratings yet
- Transistor Biasing and StabilisationDocument22 pagesTransistor Biasing and StabilisationRaja Sekhar BatchuNo ratings yet
- 90 1702009711439Document20 pages90 1702009711439Fairoz FairozNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- ConverterDocument7 pagesConverterjoanelias45No ratings yet
- Transistor Biasing and Stabilization: Lesson - 1Document57 pagesTransistor Biasing and Stabilization: Lesson - 1Naseer Mohammed100% (1)
- Pimentel, 2008Document6 pagesPimentel, 2008EdsonNo ratings yet
- Ripple Current Reduction Technique For DC To DC Converter Using Tapped InductorDocument6 pagesRipple Current Reduction Technique For DC To DC Converter Using Tapped InductorInternational Journal of Latest Research in Engineering and TechnologyNo ratings yet
- Enhancement of Power Quality in Distribution Systems Using DstatcomDocument7 pagesEnhancement of Power Quality in Distribution Systems Using Dstatcomvc_pothuNo ratings yet
- Electronic Circuit Analysis and Design ECE 402 (TIP Reviewer)Document51 pagesElectronic Circuit Analysis and Design ECE 402 (TIP Reviewer)James Lindo100% (1)
- Lecture 4 Chap 31Document75 pagesLecture 4 Chap 31Bitew AyalewNo ratings yet
- Ho-1.1 Fault Analysis 2Document17 pagesHo-1.1 Fault Analysis 2japhet ontongNo ratings yet
- Four Novel PWM Shoot-Through Control Methods For Impedance Source DC-DC ConvertersDocument10 pagesFour Novel PWM Shoot-Through Control Methods For Impedance Source DC-DC ConvertersUtkarsh PrakashNo ratings yet
- A 50 MHZ Order Elliptic Lp-Filter Using Current Mode GM-C TopologyDocument4 pagesA 50 MHZ Order Elliptic Lp-Filter Using Current Mode GM-C TopologyYJ ZHANGNo ratings yet
- Analysis of Predictive Control For Active Power Factor CorrectioDocument6 pagesAnalysis of Predictive Control For Active Power Factor Correctioezloy80No ratings yet
- Ecodial Advance Calculation 4.1 PDFDocument33 pagesEcodial Advance Calculation 4.1 PDFYouwan LeeNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)From EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)No ratings yet
- PHYS 352: ReferenceDocument8 pagesPHYS 352: ReferencemasmoxNo ratings yet
- AN1826 Application Note: Transient Protection Solutions: Transil™ Diode Versus VaristorDocument5 pagesAN1826 Application Note: Transient Protection Solutions: Transil™ Diode Versus VaristormasmoxNo ratings yet
- Apparent Dynamic Resistance Calculation of Transil: RD TP RDDocument4 pagesApparent Dynamic Resistance Calculation of Transil: RD TP RDmasmoxNo ratings yet
- Dispense Avanzate CDocument6 pagesDispense Avanzate CmasmoxNo ratings yet
- VDDPLL Filter: Dev5213Cf Reva (C) P&E Microcomputer Systems, Inc 2005Document1 pageVDDPLL Filter: Dev5213Cf Reva (C) P&E Microcomputer Systems, Inc 2005masmoxNo ratings yet
- PMM VFD Manual d11 03 010410Document100 pagesPMM VFD Manual d11 03 010410molanoavilaNo ratings yet
- Ac 1Document21 pagesAc 1ଦେବୀ ପ୍ରସାଦ ପଟନାୟକNo ratings yet
- T Rec G.9959 201501 I!!pdf eDocument128 pagesT Rec G.9959 201501 I!!pdf eJason LaCockNo ratings yet
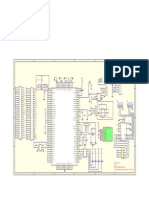
- PCB Data - Pivot TableDocument50 pagesPCB Data - Pivot TabletbstyrexNo ratings yet
- Unit-1 PicDocument40 pagesUnit-1 Picsarath100% (1)
- CS8382 Digital Sys Lab Student ManualDocument87 pagesCS8382 Digital Sys Lab Student Manualgukan gukanNo ratings yet
- Power Devices: Selection Guide 2009Document80 pagesPower Devices: Selection Guide 2009DoDuyBacNo ratings yet
- Beyma sm112nDocument2 pagesBeyma sm112nIsus AudioNo ratings yet
- Aeng 514 FinalDocument722 pagesAeng 514 FinalPaul GernahNo ratings yet
- MEX816UDocument19 pagesMEX816USergeyNo ratings yet
- Phase Locked Loop, PLL - TutorialDocument14 pagesPhase Locked Loop, PLL - TutorialJFJFERNANDEZNo ratings yet
- UPS Repairing PDFDocument65 pagesUPS Repairing PDF11111100% (2)
- PDFDocument2 pagesPDFInsyafa NalaprajaNo ratings yet
- Operational AmplifiersDocument49 pagesOperational Amplifiersangelo rodriguezNo ratings yet
- A Single-Switch Transformerless DC-DC Converter With Universal Input Voltage For Fuel Cell Vehicles Analysis and DesignDocument12 pagesA Single-Switch Transformerless DC-DC Converter With Universal Input Voltage For Fuel Cell Vehicles Analysis and Designreza mohajeryNo ratings yet
- TUGx-Abstracts 190702 PDFDocument15 pagesTUGx-Abstracts 190702 PDFMahesh MahiNo ratings yet
- MAS055 Ifho l1800 Sec1 Sec3Document113 pagesMAS055 Ifho l1800 Sec1 Sec3adhe habibieNo ratings yet
- RR58 Good 3 Phase Regulator Rectifier DiagramDocument2 pagesRR58 Good 3 Phase Regulator Rectifier DiagramMick BurnsNo ratings yet
- Catalog Commax 2012 2013Document28 pagesCatalog Commax 2012 2013MesterulTauNo ratings yet
- Memorex MT1191V - MT1131A-32176 PDFDocument23 pagesMemorex MT1191V - MT1131A-32176 PDFdomador1624No ratings yet
- Safety Controller - Two Hand Control Station - Contactor - Cat.4 PL E - SIL 3 - Stop Category 0Document4 pagesSafety Controller - Two Hand Control Station - Contactor - Cat.4 PL E - SIL 3 - Stop Category 0davidcristian2009100% (1)
- IFM Speed Relay DD0203 Data SheetDocument2 pagesIFM Speed Relay DD0203 Data SheetRaymund GatocNo ratings yet
- Submittal Specification For 400 Ka SPD Series Sidemount VersionsDocument2 pagesSubmittal Specification For 400 Ka SPD Series Sidemount VersionsDaniel GutierrezNo ratings yet
- EsquemaaDocument96 pagesEsquemaaPaulo Henrique LopesNo ratings yet
- Recess Mount Safety Beam: Accuguard Db11Document2 pagesRecess Mount Safety Beam: Accuguard Db11b0b027No ratings yet
- Eaas0593 XaDocument24 pagesEaas0593 XaAchmad AnugrahNo ratings yet
- Mcp1416 Power Mosfet DriverDocument18 pagesMcp1416 Power Mosfet DriverNegru P. PlantatieNo ratings yet
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Document29 pagesArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- Variable DC Power SupplyDocument8 pagesVariable DC Power SupplyAizaz Hussain ShahNo ratings yet
- Hygrolab: Bench Top Humidity Temperature Indicator Instruction Manual V2.0Document42 pagesHygrolab: Bench Top Humidity Temperature Indicator Instruction Manual V2.0Angel Luis AmadorNo ratings yet