You might also like
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyFrom EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyRating: 3 out of 5 stars3/5 (2)
- 10.1007@978 3 642 82838 615 PDFDocument15 pages10.1007@978 3 642 82838 615 PDFLeonardo Calheiros RodriguesNo ratings yet
- VIBRATION ANALYSIS OF A ROTATING TIMOSHENKO BEAM LIN 200 000167190400006Document20 pagesVIBRATION ANALYSIS OF A ROTATING TIMOSHENKO BEAM LIN 200 000167190400006Mariela TisseraNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Vibration of A Free Free Beam Under TensDocument10 pagesVibration of A Free Free Beam Under Tensjean.vasco94No ratings yet
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesFrom EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesNo ratings yet
- Vibrations of Bonded Beams With A Single Lap Adhesive JointDocument11 pagesVibrations of Bonded Beams With A Single Lap Adhesive JointBobby Yusuf HakaNo ratings yet
- Study of Warping Torsion of Thin-Walled Beams With Open Cross-Section Using Macro-ElementsDocument16 pagesStudy of Warping Torsion of Thin-Walled Beams With Open Cross-Section Using Macro-ElementsnevinkoshyNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document6 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Nolinealrespuestamasaresorte PDFDocument11 pagesNolinealrespuestamasaresorte PDFBlanca RiosNo ratings yet
- Free VibrationDocument25 pagesFree VibrationXiaomin XuNo ratings yet
- Stress Characteristics of Unidirectional Composites With Triple Surface NotchesDocument8 pagesStress Characteristics of Unidirectional Composites With Triple Surface NotchesSarfaraz AlamNo ratings yet
- Free Vibration of The Timoshenko Beam Interacting With The Winkler FoundationDocument15 pagesFree Vibration of The Timoshenko Beam Interacting With The Winkler FoundationyaragarciadominguezNo ratings yet
- Free Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoDocument7 pagesFree Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoquastardNo ratings yet
- 1 s2.0 S0894916610600079 MainDocument9 pages1 s2.0 S0894916610600079 MainAndrés Martinez ColanNo ratings yet
- Flexural Motion of a Radially Rotating BeamDocument10 pagesFlexural Motion of a Radially Rotating BeamAkshat RastogiNo ratings yet
- Transient Dynamics of Laminated Beams, An Evaluation With A Higher-Order Refined TheoryDocument11 pagesTransient Dynamics of Laminated Beams, An Evaluation With A Higher-Order Refined TheoryFAIZNo ratings yet
- Two Nonlinear Models of A Transversely Vibrating StringDocument8 pagesTwo Nonlinear Models of A Transversely Vibrating StringGeorg BekesyNo ratings yet
- MTD of Determining Instability Regions Burney1971Document13 pagesMTD of Determining Instability Regions Burney1971FAIZNo ratings yet
- 6 Band Theory of SolidsDocument45 pages6 Band Theory of Solidssaichandrasekhar_dNo ratings yet
- Free Transverse Vibrations of ElasticallyDocument17 pagesFree Transverse Vibrations of ElasticallyAnonymous 17ihTauS5No ratings yet
- Coupled lateral-torsion vibration of asymmetric shear-wall structuresDocument12 pagesCoupled lateral-torsion vibration of asymmetric shear-wall structuresLama DkweirNo ratings yet
- The Deformation Analysis of The Curved Box Girder Bridges Under Different RadiusDocument6 pagesThe Deformation Analysis of The Curved Box Girder Bridges Under Different RadiusMARUFNo ratings yet
- Nonlinear Vibration Analysis of Euler-Bernoulli Beams by Using Continuous Galerkin-Petrov Time-Discretization MethodDocument15 pagesNonlinear Vibration Analysis of Euler-Bernoulli Beams by Using Continuous Galerkin-Petrov Time-Discretization MethodMuhammad Sabeel KhanNo ratings yet
- Some Conditions Under Which Biot's Equations of Consolidation Reduce To Terzaghi's EquationDocument4 pagesSome Conditions Under Which Biot's Equations of Consolidation Reduce To Terzaghi's Equation3 éme infraNo ratings yet
- Mechanics - Chap. 2 Problems)Document3 pagesMechanics - Chap. 2 Problems)Carlos CarranzaNo ratings yet
- Theoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered BeamDocument11 pagesTheoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered Beamteju1996coolNo ratings yet
- The First Order Shear Deformation Theory For Symmetrically Laminated Composite Plates On Elastic FoundationDocument9 pagesThe First Order Shear Deformation Theory For Symmetrically Laminated Composite Plates On Elastic FoundationUmamaheswararao TumatiNo ratings yet
- Coupled Instabilities in A Two-Bar Frame A QualitaDocument10 pagesCoupled Instabilities in A Two-Bar Frame A QualitabenyfirstNo ratings yet
- Lateral-Torsional Deformations of C-Section and Z-Section Beams With Continuous BracingDocument19 pagesLateral-Torsional Deformations of C-Section and Z-Section Beams With Continuous Bracingjackcan501No ratings yet
- Axisymmetric Vortex Breakdown in A PipeDocument12 pagesAxisymmetric Vortex Breakdown in A PipesurfchrizNo ratings yet
- Mca 15 00096 PDFDocument12 pagesMca 15 00096 PDFFarrukh RizwanNo ratings yet
- 02 Me9631 PDFDocument10 pages02 Me9631 PDFJuan Carlos Torres HernándezNo ratings yet
- Fimfeififviifv FJFNFNFNFJFNFDocument18 pagesFimfeififviifv FJFNFNFNFJFNFHari NirmalNo ratings yet
- On Free and Forced Vibration of Beam-Strings Using Wave-Based Transfer MatricesDocument34 pagesOn Free and Forced Vibration of Beam-Strings Using Wave-Based Transfer MatricesSoumyajit RoyNo ratings yet
- TSP Cmes 1Document26 pagesTSP Cmes 1lepetitkrahNo ratings yet
- Transverse Vibration of A Multiple-Timoshenko Beam System With Intermediate Elastic Connections Due To A Moving LoadDocument19 pagesTransverse Vibration of A Multiple-Timoshenko Beam System With Intermediate Elastic Connections Due To A Moving LoadgheinbaNo ratings yet
- Euler Bernoulli Beam Theory Using The Finite Difference MethodDocument33 pagesEuler Bernoulli Beam Theory Using The Finite Difference MethodЛейсан МиннахметоваNo ratings yet
- Modeling and Experimental Investigation On The Vibration of Main Drive Chain in EscalatorDocument12 pagesModeling and Experimental Investigation On The Vibration of Main Drive Chain in EscalatorOussama AkrmiNo ratings yet
- Transverse Vibrations of Elastic Thin Beam Resting On Variable Elastic FoundationsDocument8 pagesTransverse Vibrations of Elastic Thin Beam Resting On Variable Elastic FoundationsNemesis2103No ratings yet
- Computers and Mathematics With Applications: Safa Bozkurt Coşkun, Mehmet Tarık AtayDocument7 pagesComputers and Mathematics With Applications: Safa Bozkurt Coşkun, Mehmet Tarık AtayClayton RobersonNo ratings yet
- Dynamic Behavior of Suspension Bridges under Moving LoadsDocument13 pagesDynamic Behavior of Suspension Bridges under Moving LoadssergiostolovasNo ratings yet
- A Higher-Order Facet Quadrilateral Composite Shell Element: Int. J. Numer. Meth. Engng., 40, 4477-4499 (1997)Document23 pagesA Higher-Order Facet Quadrilateral Composite Shell Element: Int. J. Numer. Meth. Engng., 40, 4477-4499 (1997)CalculistaNo ratings yet
- (2005) Vibration Analysis of A Stepped Laminated Composite Timoshenko BeamDocument10 pages(2005) Vibration Analysis of A Stepped Laminated Composite Timoshenko BeamMohammad AshrafyNo ratings yet
- Postbuckling Analysis of Columns Resting On An Elastic FoundationDocument10 pagesPostbuckling Analysis of Columns Resting On An Elastic FoundationIrani GonçalvesNo ratings yet
- Matriz de Rigidez GeometricaDocument14 pagesMatriz de Rigidez GeometricaManuel CruzNo ratings yet
- Consistent characteristic length for smeared cracking modelsDocument14 pagesConsistent characteristic length for smeared cracking modelsBui Hoang GiangNo ratings yet
- Linear Non Linear FEMDocument24 pagesLinear Non Linear FEMwial8295No ratings yet
- A Primer On Elliptic Functions With Applications in Classical Mechanics (Alan Blaisard)Document23 pagesA Primer On Elliptic Functions With Applications in Classical Mechanics (Alan Blaisard)Jason UchennnaNo ratings yet
- 130 DynamicDocument6 pages130 Dynamicvijay kumarNo ratings yet
- On Finite Deformations of Spatially Curved Bisymmetric Thin-Walled RodsDocument12 pagesOn Finite Deformations of Spatially Curved Bisymmetric Thin-Walled RodsGogyNo ratings yet
- A Consistent Beam Element Formulation Considering Shear Lag EffectDocument11 pagesA Consistent Beam Element Formulation Considering Shear Lag EffectcrusanuNo ratings yet
- Barsoum 1970Document18 pagesBarsoum 1970Doan Nguyen VanNo ratings yet
- 3-D finite element analysis of composite beams based on homogenization theoryDocument14 pages3-D finite element analysis of composite beams based on homogenization theorytizoclopezNo ratings yet
- Behaviour of Stiffened Composite Beams With Partial Shear Interaction Accounting For Time EffectsDocument8 pagesBehaviour of Stiffened Composite Beams With Partial Shear Interaction Accounting For Time EffectsVictorNo ratings yet
- Buckling Optimization and Prebuckling Enhancement of Imperfect Composite Plates Using Piezoelectric ActuatorsDocument16 pagesBuckling Optimization and Prebuckling Enhancement of Imperfect Composite Plates Using Piezoelectric ActuatorsIONUT RACANELNo ratings yet
- Thin Aerofoil Theory NotesDocument42 pagesThin Aerofoil Theory NotesarravindNo ratings yet
- 1994 - Second-Order Generalised Beam TheoryDocument21 pages1994 - Second-Order Generalised Beam TheoryJosue LewandowskiNo ratings yet
- Artigo EfDocument15 pagesArtigo EfLucas EmmanoelNo ratings yet
- Influence of Local Buckling On Global Instability: Simplified, Large Deformation, Post-Buckling Analyses of Plane TrussesDocument15 pagesInfluence of Local Buckling On Global Instability: Simplified, Large Deformation, Post-Buckling Analyses of Plane TrussesnctfatNo ratings yet
- Buckling of Long Regular TrussesDocument12 pagesBuckling of Long Regular TrussesnctfatNo ratings yet
- Exact geometry considerations in truss buckling analysisDocument8 pagesExact geometry considerations in truss buckling analysisnctfatNo ratings yet
- Worst Shapes of Imperfections For Space Trusses With Multiple Global and Local Buckling ModesDocument18 pagesWorst Shapes of Imperfections For Space Trusses With Multiple Global and Local Buckling ModesnctfatNo ratings yet
- Free Vibration Analysis of FG Sandwich Plates On Elastic Foundation Using A Refined Quasi-3D Inverse Sinusoidal Shear Deformation TheoryDocument11 pagesFree Vibration Analysis of FG Sandwich Plates On Elastic Foundation Using A Refined Quasi-3D Inverse Sinusoidal Shear Deformation TheorynctfatNo ratings yet
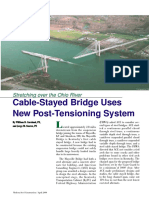
- 2000v04 Cable-Stayed PDFDocument6 pages2000v04 Cable-Stayed PDFKym 88No ratings yet
- Thin-Walled Structures: Canh Tuan Nguyen, Jiho Moon, Van Nam Le, Hak-Eun LeeDocument9 pagesThin-Walled Structures: Canh Tuan Nguyen, Jiho Moon, Van Nam Le, Hak-Eun LeenctfatNo ratings yet
- Roles and Responsibilities For MDS Vietnam 2020Document2 pagesRoles and Responsibilities For MDS Vietnam 2020nctfatNo ratings yet
- Roles and Responsibilities For MDS Vietnam 2020Document2 pagesRoles and Responsibilities For MDS Vietnam 2020nctfatNo ratings yet
- Thin-Walled Structures: Canh Tuan Nguyen, Jiho Moon, Van Nam Le, Hak-Eun LeeDocument9 pagesThin-Walled Structures: Canh Tuan Nguyen, Jiho Moon, Van Nam Le, Hak-Eun LeenctfatNo ratings yet
- Boiler Horsepower, Efficiency, Fuel Consumption MCQDocument20 pagesBoiler Horsepower, Efficiency, Fuel Consumption MCQKristian Taruc100% (2)
- Chemical Testing Report for Aluminium SheetDocument1 pageChemical Testing Report for Aluminium SheetP NAVEEN KUMARNo ratings yet
- Advanced Lithium-Ion Battery Failure Analysis - Thought Leadership - Knowledge - ExponentDocument10 pagesAdvanced Lithium-Ion Battery Failure Analysis - Thought Leadership - Knowledge - ExponentAndyNo ratings yet
- (Mai 1.6) Geometric SequencesDocument22 pages(Mai 1.6) Geometric SequencesShivSantosh JhaNo ratings yet
- AS-Unit-8-On-the-Move-Exam-AnswersDocument31 pagesAS-Unit-8-On-the-Move-Exam-Answersastr0pay7No ratings yet
- 28 Roark Flat PlatesDocument14 pages28 Roark Flat Platesgutmont0% (1)
- Mechanical Vibrations: Vibration Isolation DesignDocument11 pagesMechanical Vibrations: Vibration Isolation DesignNABIL HUSSAINNo ratings yet
- Tyas Ajeng Puspitasari, S.PD: Grade VIII Semester 2Document31 pagesTyas Ajeng Puspitasari, S.PD: Grade VIII Semester 2Tyas AjengNo ratings yet
- Michael A Brilleslyper Michael J Dorff EDocument392 pagesMichael A Brilleslyper Michael J Dorff Eosama hasanNo ratings yet
- Waves - Booklet 1 (New IAL) AnsDocument10 pagesWaves - Booklet 1 (New IAL) AnsfedNo ratings yet
- 22Document50 pages22physicsdocs87% (15)
- Black Holes A Very Short Introduction by Katherine BlundellDocument150 pagesBlack Holes A Very Short Introduction by Katherine BlundellSalman Ali100% (2)
- Computers and Geotechnics 2017 PDFDocument24 pagesComputers and Geotechnics 2017 PDFAyman ABEDNo ratings yet
- Isaac NewtonDocument15 pagesIsaac NewtonSamanNo ratings yet
- Plant SoilDocument19 pagesPlant SoilAngus VartyNo ratings yet
- Presentation: The Passive 1: Tenses and ModalsDocument2 pagesPresentation: The Passive 1: Tenses and ModalsNga LêNo ratings yet
- Lumenis Selecta II Operator ManualDocument80 pagesLumenis Selecta II Operator ManualDylan MyersNo ratings yet
- 1271 Spcs For Thermal Evaluation & Classification of Ele. InsulationDocument12 pages1271 Spcs For Thermal Evaluation & Classification of Ele. InsulationSandeep NairNo ratings yet
- Tolon Brochure 2014-EnDocument16 pagesTolon Brochure 2014-Encouemba18th batchNo ratings yet
- Volume Benda Putar Dan CentroidsDocument16 pagesVolume Benda Putar Dan CentroidsacepNo ratings yet
- 1 Space, Time, and SpacetimeDocument4 pages1 Space, Time, and SpacetimexerenusNo ratings yet
- NCERT Solutions for Class 11 Physics Chapter 7 System of ParticlesDocument32 pagesNCERT Solutions for Class 11 Physics Chapter 7 System of Particleserfgtrgv vfvvvNo ratings yet
- SCIENCE 10 Activity 2.2Document3 pagesSCIENCE 10 Activity 2.2sheila GepigaNo ratings yet
- Kertas 2 Pep Akhir Tahun Ting 4 Terengganu 2011Document12 pagesKertas 2 Pep Akhir Tahun Ting 4 Terengganu 2011Muhamad FarisNo ratings yet
- Series-Parallel Circuit AnalysisDocument12 pagesSeries-Parallel Circuit AnalysismarkkkkkNo ratings yet
- Design and Analysis of Impact CrushersDocument49 pagesDesign and Analysis of Impact CrushersAbebaw WorkieNo ratings yet
- Stengers 'Shibbolet ForewordDocument12 pagesStengers 'Shibbolet ForewordAndreas LeyererNo ratings yet
- FRQ Review 2 - W - Teacher NotesDocument5 pagesFRQ Review 2 - W - Teacher NotesNoor FarhanNo ratings yet
- Estimation of Power and Efficiency of Hydraulic Ram Pump With Re-Circulation SystemDocument13 pagesEstimation of Power and Efficiency of Hydraulic Ram Pump With Re-Circulation SystemAnand M VNo ratings yet
- Force Polygon Equilibrium ExperimentDocument1 pageForce Polygon Equilibrium ExperimentRatala GepNo ratings yet
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (57)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (80)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Quiet Zone: Unraveling the Mystery of a Town Suspended in SilenceFrom EverandThe Quiet Zone: Unraveling the Mystery of a Town Suspended in SilenceRating: 3.5 out of 5 stars3.5/5 (23)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (241)
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesFrom EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesNo ratings yet
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (587)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980From Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Rating: 4 out of 5 stars4/5 (21)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- The Path Between the Seas: The Creation of the Panama Canal, 1870-1914From EverandThe Path Between the Seas: The Creation of the Panama Canal, 1870-1914Rating: 4.5 out of 5 stars4.5/5 (124)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4.5 out of 5 stars4.5/5 (4)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- Smart Phone Dumb Phone: Free Yourself from Digital AddictionFrom EverandSmart Phone Dumb Phone: Free Yourself from Digital AddictionRating: 5 out of 5 stars5/5 (11)