You might also like
- Tyre design optimizationDocument3 pagesTyre design optimizationsrijithbpillai7087No ratings yet
- Suspension Analysis PDFDocument5 pagesSuspension Analysis PDFramsaiNo ratings yet
- Design of Double Wishbone Suspension System of BAJA VehicleDocument8 pagesDesign of Double Wishbone Suspension System of BAJA VehicleSai Krishna SKNo ratings yet
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- Senior Project ReportDocument6 pagesSenior Project ReportRoss Bunnell100% (1)
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Tyre Report SampleDocument5 pagesTyre Report SampleArka PatraNo ratings yet
- All You Need To Know About Differentials PDFDocument107 pagesAll You Need To Know About Differentials PDFJay100% (1)
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Report On Pushrod SuspensionDocument33 pagesReport On Pushrod SuspensionAshish Rawat100% (4)
- Secrets of Underbody Tunnels, Rear Diffusers and Venturis - SymscapeDocument5 pagesSecrets of Underbody Tunnels, Rear Diffusers and Venturis - SymscapePin Pon2No ratings yet
- Porsche Chassis DevelopmentDocument18 pagesPorsche Chassis DevelopmentArif OthmanNo ratings yet
- Vehicle Suspension Modeling NotesDocument25 pagesVehicle Suspension Modeling Notesahmetlutfu100% (2)
- 253 Suspension Calc ExplainedDocument1 page253 Suspension Calc ExplainedholaqNo ratings yet
- AC Worksheet v016Document82 pagesAC Worksheet v016Игорь БелецкийNo ratings yet
- FSAE Data Analysis Day 2 To PrintDocument55 pagesFSAE Data Analysis Day 2 To PrintJorge CorderoNo ratings yet
- CG Height Calculator - Automotive Brake System Calculator - BRAKE POWERDocument2 pagesCG Height Calculator - Automotive Brake System Calculator - BRAKE POWERAnonymous QiMB2lBCJLNo ratings yet
- Team Teaching Presentation How Car Suspension WorksDocument17 pagesTeam Teaching Presentation How Car Suspension Worksmsaad19103564No ratings yet
- Analysis of Davis Steering Gear Mechanism For Four Wheels and Six WheelsDocument5 pagesAnalysis of Davis Steering Gear Mechanism For Four Wheels and Six WheelsIJIRSTNo ratings yet
- Double WishboneDocument6 pagesDouble WishboneRian SteveNo ratings yet
- Development and Experimental Verification of A Parametric Model of An Automotive DamperDocument126 pagesDevelopment and Experimental Verification of A Parametric Model of An Automotive DamperMrudula Amar WardeNo ratings yet
- Chassis Newsletter 2010.8Document3 pagesChassis Newsletter 2010.8Ganesh ShanmugamNo ratings yet
- Modeling and Validation of Off-Road Vehicle Ride DynamicsDocument17 pagesModeling and Validation of Off-Road Vehicle Ride DynamicsAnderson MoribeNo ratings yet
- Find Your Roll CenterDocument20 pagesFind Your Roll CenterchainplatesNo ratings yet
- CFD of Clubman Roll CagesDocument18 pagesCFD of Clubman Roll CagesJoel ForbesNo ratings yet
- Development of Aerodynamics For A Solar Race CarDocument7 pagesDevelopment of Aerodynamics For A Solar Race CarAmr MagdyNo ratings yet
- Aerodynamics Related To ChassisDocument23 pagesAerodynamics Related To ChassisAmal MechanicNo ratings yet
- Suspension Design by Ravi DeshmukhDocument11 pagesSuspension Design by Ravi DeshmukhsonirocksNo ratings yet
- Design and Analysis of Brakes of Go-KartDocument11 pagesDesign and Analysis of Brakes of Go-Kartvijay9994100% (1)
- 2011 REV SAE Suspension Kiszco PDFDocument112 pages2011 REV SAE Suspension Kiszco PDFRushik KudaleNo ratings yet
- SAE 2002-01-3105 (Screen)Document14 pagesSAE 2002-01-3105 (Screen)rajdrklNo ratings yet
- Baja Suspension ReportDocument3 pagesBaja Suspension ReportheroNo ratings yet
- DamperDocument52 pagesDampergnaniofs3960No ratings yet
- OptimumKinematics - Help FileDocument95 pagesOptimumKinematics - Help FileRajan SwamiNo ratings yet
- FSAE Intake Manifold Design PDFDocument3 pagesFSAE Intake Manifold Design PDFdivyank3dNo ratings yet
- Force Based Roll CentersDocument6 pagesForce Based Roll Centersnick944100% (1)
- IndyCar Chassis Dimensions GuideDocument4 pagesIndyCar Chassis Dimensions GuideKarthikeyan NavaneethakrishnanNo ratings yet
- OptimumT Software for Advanced Tire Data AnalysisDocument6 pagesOptimumT Software for Advanced Tire Data AnalysisPierre LalsingNo ratings yet
- Damper DynoDocument3 pagesDamper DynoEoin MurrayNo ratings yet
- Suspension Analyzer ManualDocument156 pagesSuspension Analyzer ManualSankalp SharmaNo ratings yet
- Damper Curves 2Document6 pagesDamper Curves 2Piyush DubeNo ratings yet
- Bump SteerDocument5 pagesBump SteerHimanshu RajputNo ratings yet
- AWD Efficiency DevelopmentsDocument17 pagesAWD Efficiency Developmentsadfa9No ratings yet
- Vehicle Roll EstimatorDocument10 pagesVehicle Roll EstimatorRaja Amer AzimNo ratings yet
- Tire Modeling ExplainedDocument33 pagesTire Modeling ExplainedMatthew KenyonNo ratings yet
- FSAE Damper Guide - Jim Kasprzak Kaz Tech TipDocument25 pagesFSAE Damper Guide - Jim Kasprzak Kaz Tech TipAlex BradleyNo ratings yet
- Steering Geometry and Caster Measurement PDFDocument18 pagesSteering Geometry and Caster Measurement PDFVinayChikNo ratings yet
- Ackermann Steering For Performance Race Cars PDFDocument22 pagesAckermann Steering For Performance Race Cars PDFr2d23No ratings yet
- 09 Suspension ConceptsDocument33 pages09 Suspension Conceptskaka1211402No ratings yet
- Design of Shock Absorber For Car Front BumperDocument4 pagesDesign of Shock Absorber For Car Front BumperIJSTENo ratings yet
- Wheel Assembly, SuspensionDocument7 pagesWheel Assembly, Suspensionkishan24812No ratings yet
- 29 Ritsumeikanuniversity SpecsDocument2 pages29 Ritsumeikanuniversity SpecsMari MuthuNo ratings yet
- Brake Force CalculationDocument25 pagesBrake Force CalculationVicky TjNo ratings yet
- MacPherson Strut Doc: Car Suspension SystemDocument7 pagesMacPherson Strut Doc: Car Suspension SystemNitin VarmanNo ratings yet
- 08a605 Vehicle Design IIDocument3 pages08a605 Vehicle Design IIdhana555No ratings yet
- Analyzing an Oversteering Car's Slip AngleDocument3 pagesAnalyzing an Oversteering Car's Slip AngleLeonardo ColpoNo ratings yet
- Cetirizine TabletDocument2 pagesCetirizine Tabletgrace_febiantyNo ratings yet
- JVC RX Es1slDocument20 pagesJVC RX Es1slvideosonNo ratings yet
- Apparent Density of Rigid Cellular Plastics: Standard Test Method ForDocument4 pagesApparent Density of Rigid Cellular Plastics: Standard Test Method ForJoãoNo ratings yet
- Igcse Chemistry Section 5 Lesson 1Document62 pagesIgcse Chemistry Section 5 Lesson 1XX OniiSan XXNo ratings yet
- Kozyrev - Aether, Time and Torsion - Divine CosmosDocument1 pageKozyrev - Aether, Time and Torsion - Divine Cosmospaulsub63No ratings yet
- Analyzing Harmonic Polarities A Tonal NaDocument352 pagesAnalyzing Harmonic Polarities A Tonal Nagaia100% (1)
- E11+WR1 OHL Andoolo 2 Test ReportDocument31 pagesE11+WR1 OHL Andoolo 2 Test ReportMuhammad Adrianto LubisNo ratings yet
- FOG HORN Suppressors and Shooting AngleDocument2 pagesFOG HORN Suppressors and Shooting AngleTwobirds Flying PublicationsNo ratings yet
- Kerosene Isosiv Process For Production of Normal Paraffins: Stephen W. SohnDocument6 pagesKerosene Isosiv Process For Production of Normal Paraffins: Stephen W. SohnAshraf SeragNo ratings yet
- Preparatory Guidance From Infosys - SP and DSE RolesDocument9 pagesPreparatory Guidance From Infosys - SP and DSE RolesSONALI MA80% (5)
- Calculation of No. of Bolts For Individual Members Bolt DiameterDocument1 pageCalculation of No. of Bolts For Individual Members Bolt DiametercharanNo ratings yet
- HOTS OrganicDocument3 pagesHOTS Organicsohil khattarNo ratings yet
- 01 To UTBK Full Version (SAINTEK) - Bahasa InggrisDocument8 pages01 To UTBK Full Version (SAINTEK) - Bahasa Inggrissepia wulandariNo ratings yet
- Raju OrdbmsDocument36 pagesRaju Ordbmssammy21791No ratings yet
- Econometric S Lecture 45Document31 pagesEconometric S Lecture 45Khurram AzizNo ratings yet
- Silver Recovery From Waste X-Ray Photographic Films Collected From Hospitals in Addis AbabaDocument7 pagesSilver Recovery From Waste X-Ray Photographic Films Collected From Hospitals in Addis Ababamuftah76No ratings yet
- Chemical and Mechanical Engineering 2300 / Thermodynamics I: Problem 1Document6 pagesChemical and Mechanical Engineering 2300 / Thermodynamics I: Problem 1Takishima N VovoNo ratings yet
- Chemistry For Engineers REVIEWEEERDocument26 pagesChemistry For Engineers REVIEWEEERJames Philip Relleve100% (5)
- Varisoft Eq 100 Ti c0920 CosmotecDocument3 pagesVarisoft Eq 100 Ti c0920 CosmotecHayala MotaNo ratings yet
- CB1 - Key Concepts in Biology (Paper 1 and 2)Document2 pagesCB1 - Key Concepts in Biology (Paper 1 and 2)Alhaji SowNo ratings yet
- Test results and costs for disease diagnosisDocument3 pagesTest results and costs for disease diagnosisWathek Al Zuaiby67% (6)
- Hybrid Audio Amplifier: The Best of Both Worlds?Document9 pagesHybrid Audio Amplifier: The Best of Both Worlds?Yeison MedranoNo ratings yet
- INTRO TO ECE - HW Assignment 2:, I, I, I V, V, V, V, P P PDocument8 pagesINTRO TO ECE - HW Assignment 2:, I, I, I V, V, V, V, P P PVienNgocQuangNo ratings yet
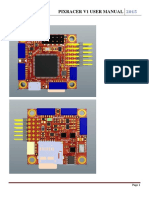
- Pixracer V1 User Manual EN PDFDocument8 pagesPixracer V1 User Manual EN PDFChrisNo ratings yet
- Training Feed Forward Networks With The Marquardt AlgorithmDocument5 pagesTraining Feed Forward Networks With The Marquardt AlgorithmsamijabaNo ratings yet
- Toshiba Qosmio x70-A Quanta Bdd Da0bddmb8h0 Rev a1a СхемаDocument37 pagesToshiba Qosmio x70-A Quanta Bdd Da0bddmb8h0 Rev a1a СхемаDeyan ProynovNo ratings yet
- Multidimensional SchemaDocument4 pagesMultidimensional SchemaJanmejay PantNo ratings yet
- Heat Exchanger BasicsDocument18 pagesHeat Exchanger BasicsJefferson WintersNo ratings yet
- Tecumseh Fast Reference Guide Compressors PDFDocument28 pagesTecumseh Fast Reference Guide Compressors PDFvale8253No ratings yet
- Residential Development Diaphragm Wall WorkDocument41 pagesResidential Development Diaphragm Wall Workjodemode100% (2)
- What Winners Won't Tell You: Lessons from a Legendary DefenderFrom EverandWhat Winners Won't Tell You: Lessons from a Legendary DefenderRating: 4.5 out of 5 stars4.5/5 (7)
- Elevate and Dominate: 21 Ways to Win On and Off the FieldFrom EverandElevate and Dominate: 21 Ways to Win On and Off the FieldRating: 5 out of 5 stars5/5 (4)
- Horse Training 101: Key Techniques for Every Horse OwnerFrom EverandHorse Training 101: Key Techniques for Every Horse OwnerRating: 4.5 out of 5 stars4.5/5 (27)
- Becky Lynch: The Man: Not Your Average Average GirlFrom EverandBecky Lynch: The Man: Not Your Average Average GirlRating: 4.5 out of 5 stars4.5/5 (13)
- Welcome to the Goddamn Ice Cube: Chasing Fear and Finding Home in the Great White NorthFrom EverandWelcome to the Goddamn Ice Cube: Chasing Fear and Finding Home in the Great White NorthRating: 4 out of 5 stars4/5 (59)
- Merle's Door: Lessons from a Freethinking DogFrom EverandMerle's Door: Lessons from a Freethinking DogRating: 4 out of 5 stars4/5 (326)
- House of Nails: A Memoir of Life on the EdgeFrom EverandHouse of Nails: A Memoir of Life on the EdgeRating: 3 out of 5 stars3/5 (4)
- Crazy for the Storm: A Memoir of SurvivalFrom EverandCrazy for the Storm: A Memoir of SurvivalRating: 3.5 out of 5 stars3.5/5 (217)
- I Never Had It Made: An AutobiographyFrom EverandI Never Had It Made: An AutobiographyRating: 3.5 out of 5 stars3.5/5 (38)
- Bloodlines: The True Story of a Drug Cartel, the FBI, and the Battle for a Horse-Racing DynastyFrom EverandBloodlines: The True Story of a Drug Cartel, the FBI, and the Battle for a Horse-Racing DynastyRating: 4 out of 5 stars4/5 (8)
- Life Is Not an Accident: A Memoir of ReinventionFrom EverandLife Is Not an Accident: A Memoir of ReinventionRating: 3.5 out of 5 stars3.5/5 (7)
- The Arm: Inside the Billion-Dollar Mystery of the Most Valuable Commodity in SportsFrom EverandThe Arm: Inside the Billion-Dollar Mystery of the Most Valuable Commodity in SportsRating: 4 out of 5 stars4/5 (49)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Perfect Mile: Three Athletes, One Goal, and Less Than Four Minutes to Achieve ItFrom EverandThe Perfect Mile: Three Athletes, One Goal, and Less Than Four Minutes to Achieve ItNo ratings yet
- Endure: How to Work Hard, Outlast, and Keep HammeringFrom EverandEndure: How to Work Hard, Outlast, and Keep HammeringRating: 4.5 out of 5 stars4.5/5 (284)
- The Truth About Aaron: My Journey to Understand My BrotherFrom EverandThe Truth About Aaron: My Journey to Understand My BrotherNo ratings yet
- Sprawlball: A Visual Tour of the New Era of the NBAFrom EverandSprawlball: A Visual Tour of the New Era of the NBARating: 4 out of 5 stars4/5 (11)
- The Inside Game: Bad Calls, Strange Moves, and What Baseball Behavior Teaches Us About OurselvesFrom EverandThe Inside Game: Bad Calls, Strange Moves, and What Baseball Behavior Teaches Us About OurselvesRating: 4 out of 5 stars4/5 (7)
- Strong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerFrom EverandStrong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerRating: 4 out of 5 stars4/5 (5)
- In My Skin: My Life On and Off the Basketball CourtFrom EverandIn My Skin: My Life On and Off the Basketball CourtRating: 3.5 out of 5 stars3.5/5 (17)
- Ninja: 1,000 Years of the Shadow Warrior: A New HistoryFrom EverandNinja: 1,000 Years of the Shadow Warrior: A New HistoryRating: 3 out of 5 stars3/5 (14)
- The Teen’s Living Guide: Unlocking Your Potential for a Remarkable JourneyFrom EverandThe Teen’s Living Guide: Unlocking Your Potential for a Remarkable JourneyRating: 5 out of 5 stars5/5 (76)