You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- AST 117 - Industrial Power ElectronicsDocument31 pagesAST 117 - Industrial Power ElectronicsKrieczek DoyuganNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Ijetae 0913 69Document6 pagesIjetae 0913 69Lucian Mihai BiltiuNo ratings yet
- Has High Efficiency. Fault Current Is Limited by The Inductor Output Short Circuit Current Is Easy To ImplementDocument6 pagesHas High Efficiency. Fault Current Is Limited by The Inductor Output Short Circuit Current Is Easy To ImplementRajalakshmi ShivakumarNo ratings yet
- Analysis and Modeling of Digital Peak Current Mode ControlDocument6 pagesAnalysis and Modeling of Digital Peak Current Mode Controltinhmaixatoi2006No ratings yet
- Power Supplies Module 03Document20 pagesPower Supplies Module 03LeonardoXanMNo ratings yet
- High Efficient Asynchronous Buck Converter For Biomedical DevicesDocument7 pagesHigh Efficient Asynchronous Buck Converter For Biomedical DevicesresearchinventyNo ratings yet
- 20EE530 - Chapter1Document45 pages20EE530 - Chapter1Vivek.RNo ratings yet
- Solar InvereterDocument47 pagesSolar InvereterReshma RaviNo ratings yet
- Closed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLABDocument9 pagesClosed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLAB7031 GauravNo ratings yet
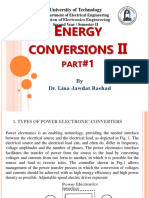
- Nergy Conversions: University of TechnologyDocument9 pagesNergy Conversions: University of TechnologyFadhil A. HasanNo ratings yet
- Deisch, C. W. (IEEE Power Electronics Specialists Conference, 1978 Record, Pp. 300-306) - Simple Switching Control Method Changes Power Converter Into A Current SourceDocument7 pagesDeisch, C. W. (IEEE Power Electronics Specialists Conference, 1978 Record, Pp. 300-306) - Simple Switching Control Method Changes Power Converter Into A Current SourceWilliam CoteNo ratings yet
- Electrical Systems and Power Electronics For Aircraft ApplicationsDocument16 pagesElectrical Systems and Power Electronics For Aircraft ApplicationsJulian ManiboNo ratings yet
- Chopper Controlled DC DrivesDocument1 pageChopper Controlled DC Drives852963No ratings yet
- Microcontroller Based Semiconductor Tap Changer For Power transfarmer-ROUGHDocument16 pagesMicrocontroller Based Semiconductor Tap Changer For Power transfarmer-ROUGHdattasriNo ratings yet
- Heavy Load Light Load Conversion ReportDocument41 pagesHeavy Load Light Load Conversion ReportSanjivee SachinNo ratings yet
- A Low Cost High Efficiency Inverter For Photovoltaic ApplicationsDocument6 pagesA Low Cost High Efficiency Inverter For Photovoltaic ApplicationsbpchimeraNo ratings yet
- Module 1 Notes 2Document36 pagesModule 1 Notes 2canusha820No ratings yet
- InverterDocument26 pagesInverteravijeet2828No ratings yet
- Welcome To All The Teacher's Of: SmitDocument30 pagesWelcome To All The Teacher's Of: Smitsrvdhar100% (2)
- Effect of Source InductanceDocument25 pagesEffect of Source InductanceSriram Anil Kumar Gandham100% (1)
- Assignment 2: Advanced Power ElectronicsDocument7 pagesAssignment 2: Advanced Power ElectronicsSourabh SenNo ratings yet
- Performance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControlDocument10 pagesPerformance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControleditorijaiemNo ratings yet
- Switch Mode Power Supply Basics TutorialDocument16 pagesSwitch Mode Power Supply Basics TutorialDavidNo ratings yet
- Voltage and Reactive Power Control: Rolly E. BalayboaDocument17 pagesVoltage and Reactive Power Control: Rolly E. BalayboaGeva GarradoNo ratings yet
- Lec 1 Module 1,2Document69 pagesLec 1 Module 1,2Sanjoy PathakNo ratings yet
- Power Factor CorrectionDocument43 pagesPower Factor Correctionravirnjn88No ratings yet
- Implementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerDocument6 pagesImplementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerAlonso CoradoNo ratings yet
- Power Electronic Module - Chapter 1Document27 pagesPower Electronic Module - Chapter 1jayxcell100% (1)
- An Overview of Switched-Mode Power Supplies: Integrated CircuitsDocument6 pagesAn Overview of Switched-Mode Power Supplies: Integrated CircuitsJohn Wanyoike MakauNo ratings yet
- Control of Buck-Boost Chopper Type AC Voltage RegulatorDocument5 pagesControl of Buck-Boost Chopper Type AC Voltage RegulatorMariya GovindNo ratings yet
- Chapter - I 1.1 GeneralDocument67 pagesChapter - I 1.1 GeneralJilly ArasuNo ratings yet
- Switched Mode Power Supplies Module 3Document20 pagesSwitched Mode Power Supplies Module 3xuyen tranNo ratings yet
- Power Electronics NotesDocument2 pagesPower Electronics Notesprasad357No ratings yet
- Chapter 1-Introduction To Power SuppliesDocument7 pagesChapter 1-Introduction To Power SuppliesBricksoe NgwenyaNo ratings yet
- NCL ReportDocument20 pagesNCL ReportSwati Tripathi33% (3)
- Unit 1: 18Cs206 Basic of Electrical and Electronics EngineeringDocument21 pagesUnit 1: 18Cs206 Basic of Electrical and Electronics EngineeringAJAY SNo ratings yet
- Chapter-1: 1.1 Concept of Power ElectronicsDocument35 pagesChapter-1: 1.1 Concept of Power ElectronicsHãrshã SmîlęýNo ratings yet
- Unit-I: 1. What Is An Inverter?Document12 pagesUnit-I: 1. What Is An Inverter?Gnanaseharan ArunachalamNo ratings yet
- Sem ReportDocument38 pagesSem ReportSafalsha BabuNo ratings yet
- How An SMPS WorksDocument7 pagesHow An SMPS WorksĐorđe PopovićNo ratings yet
- How An Smps Works: Rectifier StageDocument7 pagesHow An Smps Works: Rectifier StageImran AshrafNo ratings yet
- Design and Implementation of ZCS BUCK CONVERTERDocument51 pagesDesign and Implementation of ZCS BUCK CONVERTERAriful Haque100% (1)
- Design and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorDocument5 pagesDesign and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorSEP-PublisherNo ratings yet
- Study of AC and-WPS OfficeDocument6 pagesStudy of AC and-WPS OfficeBeena PalNo ratings yet
- Power Conversion SystemDocument6 pagesPower Conversion SystemDanica Nicole BuhatNo ratings yet
- Voltage Regulators With Working Principle: Rohini College of Engineering and TechnologyDocument13 pagesVoltage Regulators With Working Principle: Rohini College of Engineering and TechnologyLeta NegasaNo ratings yet
- Analog IC Design With Low-Dropout RegulatorsDocument374 pagesAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- Problem Solve of Indutrial Electronics FinalDocument9 pagesProblem Solve of Indutrial Electronics FinalMd Raton AliNo ratings yet
- Epp Project-Jon's PartDocument3 pagesEpp Project-Jon's PartJonathanCharanrajNo ratings yet
- 1.1. Definition of Power Electronics: 1.2 RectificationDocument17 pages1.1. Definition of Power Electronics: 1.2 RectificationAbdullrahman Al-ShammaaNo ratings yet
- Regulated DC Power SupplyDocument15 pagesRegulated DC Power SupplynalumilanimeNo ratings yet
- Technical Information: Product Finder Home PageDocument6 pagesTechnical Information: Product Finder Home PageawemetalNo ratings yet
- SynopsisDocument13 pagesSynopsisPooja GNo ratings yet
- J'14 - Analysis, Design and Performance of A Soft-Switching Single-Phase InverterDocument12 pagesJ'14 - Analysis, Design and Performance of A Soft-Switching Single-Phase Inverter閒雲野鶴No ratings yet
- PendahuluanDocument10 pagesPendahuluanZoneoTakan Berpling DrimhuNo ratings yet
- 50W Forward Converter With Synchronous Rectification and Secondary Side Control PDFDocument30 pages50W Forward Converter With Synchronous Rectification and Secondary Side Control PDF양영주No ratings yet
- Safety-enhanced-high-step-up-DC-DC-converter-for-ac-photovoltaic-module-applications Chapter 2 DC-DC Converters 12 PageDocument16 pagesSafety-enhanced-high-step-up-DC-DC-converter-for-ac-photovoltaic-module-applications Chapter 2 DC-DC Converters 12 PageVenkatesh ChintalaNo ratings yet
- Specialist Switch Requirement BoQDocument6 pagesSpecialist Switch Requirement BoQLohit YadavNo ratings yet
- Littelfuse ProtectionRelays SE 601 DatasheetDocument1 pageLittelfuse ProtectionRelays SE 601 DatasheettrueavatharNo ratings yet
- GRS Mobile Top Up - Wireless Market Statistics 2015 PDFDocument7 pagesGRS Mobile Top Up - Wireless Market Statistics 2015 PDFالقيل محمد الضاويNo ratings yet
- 2008 Nissan Teana J32 Service Manual-DefDocument66 pages2008 Nissan Teana J32 Service Manual-DefMrihex100% (1)
- LDS Basic SpecificationDocument9 pagesLDS Basic SpecificationBarinua deekorNo ratings yet
- Advantages and Disadvantages of Mobile Communication TechnologyDocument1 pageAdvantages and Disadvantages of Mobile Communication TechnologyJay Chan PamoteNo ratings yet
- Packaging Information For VendorsDocument8 pagesPackaging Information For VendorsMohaymenul IslamNo ratings yet
- HSE Electrical SafetyDocument6 pagesHSE Electrical Safetyfayda55No ratings yet
- LJ04 CZ FZ Processes Aug2010Document26 pagesLJ04 CZ FZ Processes Aug2010Rishabh KumarNo ratings yet
- ME189 Chapter 9Document25 pagesME189 Chapter 9abhi16No ratings yet
- PMIC For LCD TV / Monitor: General Description FeaturesDocument12 pagesPMIC For LCD TV / Monitor: General Description FeaturesGabriel LamartheeNo ratings yet
- Ecg 9620l Nihon Kohden User Manual PDFDocument3 pagesEcg 9620l Nihon Kohden User Manual PDFJhonny Mamani López50% (2)
- Forced Vibration - ResumeDocument10 pagesForced Vibration - ResumeYunendarNo ratings yet
- Basic Input/Output System, The BIOS, ROM BIOS, or System BIOS Is A Chip Located On All Motherboards ThatDocument4 pagesBasic Input/Output System, The BIOS, ROM BIOS, or System BIOS Is A Chip Located On All Motherboards ThatRonnie Oliva MalalisNo ratings yet
- Vhf-Uhf Power Modules: Number Freq. Range Max BW P Out Min. Pin MW Bias Class CaseDocument6 pagesVhf-Uhf Power Modules: Number Freq. Range Max BW P Out Min. Pin MW Bias Class CaseGeraldrum Zyzcom HdzNo ratings yet
- Temple CPU Appeal - Scanned Docs - USPS Disclosures No 1-6, Bates StampedDocument546 pagesTemple CPU Appeal - Scanned Docs - USPS Disclosures No 1-6, Bates StampedBrent MartinNo ratings yet
- DS350 Tadano Faun 1368Document61 pagesDS350 Tadano Faun 1368Mohamed Harb100% (2)
- BOSCH Detector de Humo d7050 - InstallDocument8 pagesBOSCH Detector de Humo d7050 - Installwildor01No ratings yet
- Dutch Smart Meter Requirements v2.2 Final P1Document14 pagesDutch Smart Meter Requirements v2.2 Final P1PaulHollandNo ratings yet
- MANUAL DE SERVICIO HP LaserJet Enterprise M501-M506-M507-MFP M527-M528 Managed MFP E52645-E50145-E50045-E52545 PDFDocument562 pagesMANUAL DE SERVICIO HP LaserJet Enterprise M501-M506-M507-MFP M527-M528 Managed MFP E52645-E50145-E50045-E52545 PDFmanuel molina100% (1)
- Power Factor Correction and Harmonic Control For DC Drive LoadsDocument10 pagesPower Factor Correction and Harmonic Control For DC Drive LoadsJubair Abu SalehNo ratings yet
- TDA1387 PhilipsDocument16 pagesTDA1387 PhilipsCarlos PosadaNo ratings yet
- Antenna Simulation Horn Pyr PDFDocument4 pagesAntenna Simulation Horn Pyr PDFEshwarNo ratings yet
- Reference and Owner's Manual For The Deluxe 90Document10 pagesReference and Owner's Manual For The Deluxe 90pavelscribdNo ratings yet
- PC420V Series Spec (99009) B.1Document2 pagesPC420V Series Spec (99009) B.1Jhon BaldeonNo ratings yet
- Okidata B4545: Toner Cartridge Remanufacturing InstructionsDocument12 pagesOkidata B4545: Toner Cartridge Remanufacturing InstructionsJaime Rios100% (1)
- Alpha5smart 24c1 e 0010hDocument14 pagesAlpha5smart 24c1 e 0010hمراد احمدNo ratings yet
- Electrical Board Inspection ChecklistDocument2 pagesElectrical Board Inspection ChecklistVikas Yamagar75% (4)
- BS en 175301-803-2006Document32 pagesBS en 175301-803-2006Олег СоловьевNo ratings yet
- Single Zone Call Controller C/W 12V 250ma PSU: Part NoDocument3 pagesSingle Zone Call Controller C/W 12V 250ma PSU: Part NoPriesilia PresleyNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Foundations of Western Civilization II: A History of the Modern Western World (Transcript)From EverandFoundations of Western Civilization II: A History of the Modern Western World (Transcript)Rating: 4.5 out of 5 stars4.5/5 (12)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- THE LTSPICE XVII SIMULATOR: Commands and ApplicationsFrom EverandTHE LTSPICE XVII SIMULATOR: Commands and ApplicationsRating: 5 out of 5 stars5/5 (1)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsRating: 4.5 out of 5 stars4.5/5 (3)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Beginner's Guide to Reading Schematics, Fourth EditionFrom EverandBeginner's Guide to Reading Schematics, Fourth EditionRating: 3.5 out of 5 stars3.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Solenoid Actuators: Theory and Computational MethodsFrom EverandSolenoid Actuators: Theory and Computational MethodsRating: 3 out of 5 stars3/5 (1)
- Cleanroom Technology: Fundamentals of Design, Testing and OperationFrom EverandCleanroom Technology: Fundamentals of Design, Testing and OperationNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- The Homeowner's DIY Guide to Electrical WiringFrom EverandThe Homeowner's DIY Guide to Electrical WiringRating: 5 out of 5 stars5/5 (2)
- Build Your Own Electronics WorkshopFrom EverandBuild Your Own Electronics WorkshopRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Guide to FMEA : A Proactive Approach to Failure AnalysisFrom EverandPractical Guide to FMEA : A Proactive Approach to Failure AnalysisRating: 5 out of 5 stars5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)