You might also like
- ASME Flange Bolt Torque ProcedureDocument13 pagesASME Flange Bolt Torque ProcedureHomer Silva100% (6)
- Control Systems Theory and Design: ExaminationDocument7 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Set No. 1: 4 (Z 1) (Z +1.2z+1) (z+0.1) (Z 0 - 3z+0.8)Document8 pagesSet No. 1: 4 (Z 1) (Z +1.2z+1) (z+0.1) (Z 0 - 3z+0.8)SRINIVASA RAO GANTANo ratings yet
- Exam RT2 2017 WinterDocument12 pagesExam RT2 2017 WinterLuis CarvalhoNo ratings yet
- ECE102 hw2Document5 pagesECE102 hw2Yi LinNo ratings yet
- Exam RT2 2016 WinterDocument11 pagesExam RT2 2016 WinterLuis CarvalhoNo ratings yet
- Signals and Systems2011suppDocument3 pagesSignals and Systems2011suppAnkan BhuniaNo ratings yet
- 07a7ec36 Digitalcontrolsystems PDFDocument8 pages07a7ec36 Digitalcontrolsystems PDFetitahNo ratings yet
- Control Systems Theory and Design: ExaminationDocument6 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- EE3302Document2 pagesEE3302ashishNo ratings yet
- exsheet1Document4 pagesexsheet1pobisas812No ratings yet
- Control Systems Theory and Design: Problem 1Document5 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- ExsamlDocument58 pagesExsamlAsanga JayawardanaNo ratings yet
- Drttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - inDocument3 pagesDrttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - inrama KrishnaNo ratings yet
- Control Systems Theory and Design: ExaminationDocument9 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
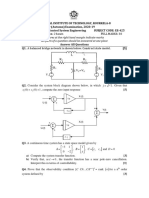
- National Institute of Technology, Rourkela-8 B.Tech. Mid Semester (Autumn) Examination, 2017-18 SUBJECT: Advanced Control System EngineeringDocument2 pagesNational Institute of Technology, Rourkela-8 B.Tech. Mid Semester (Autumn) Examination, 2017-18 SUBJECT: Advanced Control System EngineeringMadhusmita BarikNo ratings yet
- Tutorial 4LDSDocument3 pagesTutorial 4LDSshivendra.singh.vermaNo ratings yet
- Lectures On Dynamic Systems and ControlDocument11 pagesLectures On Dynamic Systems and ControljuggleninjaNo ratings yet
- Tutorial 3 LDSDocument3 pagesTutorial 3 LDSshivendra.singh.vermaNo ratings yet
- Boundary Value ProblemsDocument15 pagesBoundary Value ProblemsShadman Saqlain Rahman, 170021057No ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- Homework 1Document2 pagesHomework 1Vu LeNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- Exam RT2 2018 WinterDocument16 pagesExam RT2 2018 WinterLuis CarvalhoNo ratings yet
- Advance Control System Lab ManualDocument42 pagesAdvance Control System Lab ManualIshwari GhuleNo ratings yet
- Final Exam Automatic Control II Reglerteknik II 5hp: Good Luck!Document7 pagesFinal Exam Automatic Control II Reglerteknik II 5hp: Good Luck!salimNo ratings yet
- Control Systems Theory and Design: Problem 1Document7 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Dr. TTIT, KGF WWW - Drttit.edu - in Dr. TTIT, KGF WWW - Drttit.edu - inDocument2 pagesDr. TTIT, KGF WWW - Drttit.edu - in Dr. TTIT, KGF WWW - Drttit.edu - inrama KrishnaNo ratings yet
- Unit-II: Analysis of Discrete SystemDocument41 pagesUnit-II: Analysis of Discrete SystemRiddhijit ChattopadhyayNo ratings yet
- 436-405 Advanced Control Systems: Page 1 of 7Document6 pages436-405 Advanced Control Systems: Page 1 of 7aungwinnaingNo ratings yet
- Power System State EstimationDocument17 pagesPower System State Estimationramaprasad1967No ratings yet
- Chap3 State Variable ModelsDocument47 pagesChap3 State Variable ModelsEngr Abdul QadeerNo ratings yet
- Control Systems Theory and Design: Problem 1Document5 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Chapter 4 Controllability and ObservabilityDocument24 pagesChapter 4 Controllability and ObservabilityYucheng XiangNo ratings yet
- Control Systems Theory and Design: ExaminationDocument5 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Advanced Control TheoryDocument4 pagesAdvanced Control TheoryAmit BansodNo ratings yet
- Control System 1Document31 pagesControl System 1Rakibul Hasan RakibNo ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- Matlab Simulink DC MotorDocument12 pagesMatlab Simulink DC Motorkillua142100% (4)
- Exercise Chapter 2Document11 pagesExercise Chapter 2anon_873980168No ratings yet
- Tutorial 1-Chapter 1Document2 pagesTutorial 1-Chapter 1cantik cuteNo ratings yet
- State Space Analysis by Dr. FidaDocument44 pagesState Space Analysis by Dr. FidaAyesha TehreemNo ratings yet
- Control Systems - State Space ModelDocument8 pagesControl Systems - State Space ModelVivek PatilNo ratings yet
- Chapter3 - Modelling in TimeDocument23 pagesChapter3 - Modelling in Timeعمر الفهدNo ratings yet
- System Modeling in Time DomainDocument74 pagesSystem Modeling in Time DomainSanji KarunaNo ratings yet
- Line Integrals 1Document27 pagesLine Integrals 1aayangreatgreatNo ratings yet
- Quantum Mechanics Fall 2003-Homework Set 2: Additional ProblemsDocument2 pagesQuantum Mechanics Fall 2003-Homework Set 2: Additional ProblemsLuis Fernando AlcerroNo ratings yet
- Analysis of Common-Collector Colpitts OscillatorDocument8 pagesAnalysis of Common-Collector Colpitts OscillatorFreeFM100% (5)
- Tut 5Document4 pagesTut 5Aakriti VermaNo ratings yet
- Simulink LinuxDocument5 pagesSimulink LinuxAbhay JangirNo ratings yet
- Assignment 1 MCTE 3313 Sem 1 2018 2019Document3 pagesAssignment 1 MCTE 3313 Sem 1 2018 2019Nurmi Elisya RosliNo ratings yet
- Ee 7 Sem Control System 2 2016Document4 pagesEe 7 Sem Control System 2 2016Suryakanta PattanaikNo ratings yet
- Controlability & StabilityDocument6 pagesControlability & StabilityRehman SaleemNo ratings yet
- Modeling and Simulation: Qiu-Zhou Runall - Tex - 12/25/2008 3:19am Page 13Document51 pagesModeling and Simulation: Qiu-Zhou Runall - Tex - 12/25/2008 3:19am Page 13Samuel ChanNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesFrom EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Control Systems Theory and Design: Problem 1Document7 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Control Systems Theory and Design: ExaminationDocument9 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Control Systems Theory and Design: ExaminationDocument6 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Control Systems Theory and Design: Problem 1Document5 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Control Systems Theory and Design: Problem 1Document5 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Examination Control Systems 2: Problem 1Document4 pagesExamination Control Systems 2: Problem 1Luis CarvalhoNo ratings yet
- Control Systems Theory and Design: Problem 1Document4 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- ISA Transactions: Peyman Sindareh Esfahani, Jeffrey Kurt PieperDocument11 pagesISA Transactions: Peyman Sindareh Esfahani, Jeffrey Kurt PieperLuis CarvalhoNo ratings yet
- Y (S) U (S)Document5 pagesY (S) U (S)Luis CarvalhoNo ratings yet
- LQG/LTR Flight Controller Optimal Design Based On Differential Evolution AlgorithmDocument4 pagesLQG/LTR Flight Controller Optimal Design Based On Differential Evolution AlgorithmLuis CarvalhoNo ratings yet
- Jiang 2017Document14 pagesJiang 2017Luis CarvalhoNo ratings yet
- Control Systems Theory and Design: ExaminationDocument5 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Raman Optical Activity: An Incisive Probe of Molecular Chirality and Biomolecular StructureDocument10 pagesRaman Optical Activity: An Incisive Probe of Molecular Chirality and Biomolecular StructureLuis CarvalhoNo ratings yet
- Gerome L 2006Document11 pagesGerome L 2006Luis CarvalhoNo ratings yet
- Exam RT2 2018 WinterDocument16 pagesExam RT2 2018 WinterLuis CarvalhoNo ratings yet
- Differential Linear Matrix Inequalities Optimization: Tiago R. Gonçalves, Gabriela W. Gabriel, and José C. GeromelDocument6 pagesDifferential Linear Matrix Inequalities Optimization: Tiago R. Gonçalves, Gabriela W. Gabriel, and José C. GeromelLuis CarvalhoNo ratings yet
- Exam RT2 2015 WinterDocument9 pagesExam RT2 2015 WinterLuis CarvalhoNo ratings yet
- PEC11R Series - 12 MM Incremental Encoder: FeaturesDocument4 pagesPEC11R Series - 12 MM Incremental Encoder: FeaturesmorthredNo ratings yet
- SCADADocument18 pagesSCADAAnney RevathiNo ratings yet
- Mirror Assessment1Document2 pagesMirror Assessment1Ihopdu Doirqvr50% (2)
- Report Writing Template-1Document5 pagesReport Writing Template-1siyal343No ratings yet
- MWD LWD DD Fishing DiagramsDocument39 pagesMWD LWD DD Fishing DiagramsRazvan RaduNo ratings yet
- Successive DifferentiationDocument5 pagesSuccessive DifferentiationRahul Verma50% (2)
- Auvinet State of The Art 0Document7 pagesAuvinet State of The Art 0khernandez6491No ratings yet
- Structural Design of An Office Building With Large Spans in A Seismic ZoneDocument12 pagesStructural Design of An Office Building With Large Spans in A Seismic ZoneAndriBenzNo ratings yet
- Shakehand With Life - Quantitative TechniquesDocument9 pagesShakehand With Life - Quantitative TechniquessathyabalaramanNo ratings yet
- Ficha Seguridad Nicd SaftDocument4 pagesFicha Seguridad Nicd SaftDiego Francisco Castañeda ViñasNo ratings yet
- 6S1 Sound AttenuatorsDocument20 pages6S1 Sound AttenuatorsTaha MoradNo ratings yet
- Module 3Document50 pagesModule 3Venkitaraj K PNo ratings yet
- Venkatarajan, S. V.bhuvaneswari, B. Athijayamani, A. Sekar, S - Effect of Addition of Areca Fine Fibers On The Mechanical Properties oDocument18 pagesVenkatarajan, S. V.bhuvaneswari, B. Athijayamani, A. Sekar, S - Effect of Addition of Areca Fine Fibers On The Mechanical Properties oThiago SantosNo ratings yet
- SN74LVC2G14 Dual Schmitt-Trigger InverterDocument25 pagesSN74LVC2G14 Dual Schmitt-Trigger InverterhogaoftNo ratings yet
- Winning Solutions: Printed BookDocument1 pageWinning Solutions: Printed BookcYbernaTIc enHancENo ratings yet
- High Voltage Motor-2011Document391 pagesHigh Voltage Motor-2011eliahud100% (2)
- Herz ValvesDocument11 pagesHerz Valvesat7984582No ratings yet
- Laminar Differential Pressure Flow Measurement - Alicat ScientificDocument3 pagesLaminar Differential Pressure Flow Measurement - Alicat ScientificLisandro IaffarNo ratings yet
- AP Human Body OrientationDocument27 pagesAP Human Body OrientationWaqar AhmedNo ratings yet
- Liquid Scintillation Counter LSCL A10Document3 pagesLiquid Scintillation Counter LSCL A10labtrondigitalNo ratings yet
- Sample Detailed Lesson PlanDocument4 pagesSample Detailed Lesson PlanJhon Vincent BatalunaNo ratings yet
- Heat Exchanger DesignDocument27 pagesHeat Exchanger DesignPrateek Mall83% (6)
- Lec 6 - Multiple ReactionsDocument37 pagesLec 6 - Multiple ReactionskaurNo ratings yet
- Bulk Modulus of Air Content Oil in A Hydraulic CylinderDocument11 pagesBulk Modulus of Air Content Oil in A Hydraulic CylinderCamilo ManriqueNo ratings yet
- ONU Reacciones QuimicaDocument19 pagesONU Reacciones QuimicaDomingo AlegríaNo ratings yet
- Tutorial 9 - Polarography and Voltammetry - 481Document10 pagesTutorial 9 - Polarography and Voltammetry - 481HassanNo ratings yet
- 6 Turbo-Expander Case History - EmersonDocument11 pages6 Turbo-Expander Case History - EmersonxinghustNo ratings yet
- Review Sheet For Newton's Laws Test 15Document3 pagesReview Sheet For Newton's Laws Test 15api-237866679No ratings yet
- Dual DegreeDocument19 pagesDual DegreekhananuNo ratings yet