You might also like
- Lecture Notes For Introduction To CosmologyDocument168 pagesLecture Notes For Introduction To Cosmologytduality100% (1)
- LaTeX CheatSheetDocument2 pagesLaTeX CheatSheetivan_terzo100% (1)
- C1036 16Document10 pagesC1036 16masoudNo ratings yet
- Common Core Math 4 Today, Grade 4: Daily Skill PracticeFrom EverandCommon Core Math 4 Today, Grade 4: Daily Skill PracticeRating: 1 out of 5 stars1/5 (1)
- Activity Analysis Yoga and PilatesDocument24 pagesActivity Analysis Yoga and Pilatesapi-290348341100% (3)
- MHF4U Unit 1 Notes With SolutionsDocument31 pagesMHF4U Unit 1 Notes With SolutionsTony ParkNo ratings yet
- IAMI EK Exam Paper Collection 2017Document103 pagesIAMI EK Exam Paper Collection 2017russia far100% (3)
- Work With CL: © Dukestar Technologies Pvt. Ltd. 1/7Document7 pagesWork With CL: © Dukestar Technologies Pvt. Ltd. 1/7Vijay DasNo ratings yet
- The Inland Vessels Bill, 2021Document45 pagesThe Inland Vessels Bill, 2021VECTOR MARINE & OFFSHORE TECHNOLOGYNo ratings yet
- Grandis Engine ElectricalDocument29 pagesGrandis Engine Electricalmillanz100% (3)
- 9976 Implement Pump A10VO100DFR1-31R-PSC62K07 R910911026 PDFDocument12 pages9976 Implement Pump A10VO100DFR1-31R-PSC62K07 R910911026 PDFmorusNo ratings yet
- Domain and RangeDocument27 pagesDomain and RangeSowjanya GudimetlaNo ratings yet
- L TEX Cheat Sheet: Layout Structure The Document Math EquationsDocument2 pagesL TEX Cheat Sheet: Layout Structure The Document Math EquationsAT8iNo ratings yet
- EECE 5639 Computer Vision I: Coordinate Systems Transformations, ColorDocument50 pagesEECE 5639 Computer Vision I: Coordinate Systems Transformations, ColorSourabh Sisodia SrßNo ratings yet
- Tab Lovin-YouDocument3 pagesTab Lovin-YouRobert MatthewsNo ratings yet
- Lecture-1 NMDocument17 pagesLecture-1 NMSHASHWAT GUPTANo ratings yet
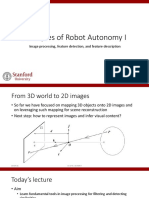
- Principles of Robot Autonomy I: Image Processing, Feature Detection, and Feature DescriptionDocument39 pagesPrinciples of Robot Autonomy I: Image Processing, Feature Detection, and Feature DescriptionratjerryNo ratings yet
- MHF4U Exam ReviewDocument6 pagesMHF4U Exam ReviewBrooke McBride-GeenNo ratings yet
- Tutorial 8 - System of Equations - InequalitiesDocument29 pagesTutorial 8 - System of Equations - InequalitiesNguyễn Trọng HiếuNo ratings yet
- April 13 2022 School Day SATDocument2 pagesApril 13 2022 School Day SATaaaverde1507No ratings yet
- Simtech-2011 (KK)Document2 pagesSimtech-2011 (KK)khodakaramiNo ratings yet
- Graphing Linear EquationDocument6 pagesGraphing Linear EquationNursupriatna AmadNo ratings yet
- Test-4 Maths SATDocument21 pagesTest-4 Maths SATLobna El-HosseinyNo ratings yet
- Graphing Linear Equations Worksheet: 1) y 2x 3 2) y 3x + 2Document2 pagesGraphing Linear Equations Worksheet: 1) y 2x 3 2) y 3x + 2Menilek AlemsegedNo ratings yet
- Graphing Linear EquationsDocument2 pagesGraphing Linear EquationsThomas WilsonNo ratings yet
- Lecture 13: Image and Kernel: The Image of A Matrix 5Document2 pagesLecture 13: Image and Kernel: The Image of A Matrix 5Benjamin MullenNo ratings yet
- Section 2.3 Polynomial Functions and Their GraphsDocument31 pagesSection 2.3 Polynomial Functions and Their GraphsAlexandria BakerNo ratings yet
- All Arround Elect 2Document3 pagesAll Arround Elect 2Diego CondeNo ratings yet
- Training Deep Neural NetworksDocument158 pagesTraining Deep Neural NetworksdawodyimerNo ratings yet
- Pre Cal-Q1 M2 PARABOLA FinDocument17 pagesPre Cal-Q1 M2 PARABOLA FinDanny Lloyd Asan BuenafeNo ratings yet
- Vedang PSAT 2Document19 pagesVedang PSAT 2Venky DicholkarNo ratings yet
- Kotaro Oshio - Red Shoes DanceDocument5 pagesKotaro Oshio - Red Shoes DanceKim TeoNo ratings yet
- Renegade Rythm GuitarDocument6 pagesRenegade Rythm GuitarEinar UtreraNo ratings yet
- Algebra 2 - Solving Quadratic Equations Practice 2Document2 pagesAlgebra 2 - Solving Quadratic Equations Practice 2Ryan AlapNo ratings yet
- Function Table Level 2Document1 pageFunction Table Level 2Edward Gamonnac BalocnitNo ratings yet
- Grade 11U Mid Term My Exam FinalDocument10 pagesGrade 11U Mid Term My Exam FinalAshley OffmanNo ratings yet
- 10 Easy Steps To Writing A Comparative Essay1Document4 pages10 Easy Steps To Writing A Comparative Essay1Christop22No ratings yet
- Ece761 Cheat SheetDocument2 pagesEce761 Cheat SheetYe Kwon HuhNo ratings yet
- Isaac Albeniz - Rumores de La CaletaDocument7 pagesIsaac Albeniz - Rumores de La CaletaMartinNo ratings yet
- Kigeki: by Gen Hoshino (星野源) Arranged by Pae ThanakritDocument3 pagesKigeki: by Gen Hoshino (星野源) Arranged by Pae Thanakrit李JosephNo ratings yet
- BookDocument29 pagesBookrehanhulkNo ratings yet
- Supplementary Answer A H2Document1 pageSupplementary Answer A H2l.kalunalanNo ratings yet
- Evaluating Definite Integrals PDFDocument3 pagesEvaluating Definite Integrals PDFJose Barrera GaleraNo ratings yet
- Microsoft Word - 1.1 WorksheetDocument6 pagesMicrosoft Word - 1.1 WorksheetManya MNo ratings yet
- 1101 - Absolute Value Transformations NotesDocument6 pages1101 - Absolute Value Transformations NotesTina Teng0% (1)
- Chua Van Thanh Hoa PDFDocument1 pageChua Van Thanh Hoa PDFNinh NguyenNo ratings yet
- A2 Semester 2 Review AnswersDocument4 pagesA2 Semester 2 Review AnswersrvmacroNo ratings yet
- Name: Number: - Due Date: - 5)Document2 pagesName: Number: - Due Date: - 5)Mustafa Ayhan DuduNo ratings yet
- ACDC - TNT (Ver 3 by Nicoetcroc)Document4 pagesACDC - TNT (Ver 3 by Nicoetcroc)Jonathan BrunoNo ratings yet
- Optional Unit 1 AssignmentDocument19 pagesOptional Unit 1 AssignmentTriet NguyenNo ratings yet
- Dsec2 5Document4 pagesDsec2 5Ahmad AditbroNo ratings yet
- Math Basic Econ LogDocument1 pageMath Basic Econ LogLiv FernandezNo ratings yet
- m14hw6 2solns PDFDocument9 pagesm14hw6 2solns PDFRose SumbiNo ratings yet
- Polyint NotesDocument59 pagesPolyint NotesegemNo ratings yet
- Asset-V1 - MITx 6.86x 1T2021 Type@asset Block@slides - Lecture10 - WithcreditsDocument25 pagesAsset-V1 - MITx 6.86x 1T2021 Type@asset Block@slides - Lecture10 - WithcreditsUttamNo ratings yet
- Modeling With Machine Learning: RNN (Part 1)Document24 pagesModeling With Machine Learning: RNN (Part 1)Rahul VasanthNo ratings yet
- The Key To Immediate Enlightenment - in ArabicDocument122 pagesThe Key To Immediate Enlightenment - in ArabicscribbozNo ratings yet
- Unit 1 - Activity 1 - Dropbox-Function Domain and Range Worksheet-1hrDocument4 pagesUnit 1 - Activity 1 - Dropbox-Function Domain and Range Worksheet-1hrdilshanrandhawa26No ratings yet
- Lecture 2: Representing Numbers in The Computer: Zhenning Cai August 19, 2019Document6 pagesLecture 2: Representing Numbers in The Computer: Zhenning Cai August 19, 2019Liu JianghaoNo ratings yet
- Chapter 1 1-Patterns and ExpressionsDocument19 pagesChapter 1 1-Patterns and Expressionsapi-265780818No ratings yet
- Short 08 Machine Data ArraysDocument20 pagesShort 08 Machine Data ArraysGulnur MamyrNo ratings yet
- Quadratic Function-1Document8 pagesQuadratic Function-1Nabil MahdarNo ratings yet
- Eiro Nareth - КузнечекDocument4 pagesEiro Nareth - КузнечекshortspanterssNo ratings yet
- Human Resource Management in Indonesia: Important Issues to Know before Establishing a Subsidiary in IndonesiaFrom EverandHuman Resource Management in Indonesia: Important Issues to Know before Establishing a Subsidiary in IndonesiaNo ratings yet
- Physics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Document12 pagesPhysics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Ali RazaNo ratings yet
- 578 ch6Document83 pages578 ch6Ali RazaNo ratings yet
- 3.2 Data Approximation and Neville's Method: B K N XDocument7 pages3.2 Data Approximation and Neville's Method: B K N XAli RazaNo ratings yet
- An Introduction To Repeated Operations in Mathematica: The "Do" StatementDocument4 pagesAn Introduction To Repeated Operations in Mathematica: The "Do" StatementAli RazaNo ratings yet
- MTL107 Set7Document5 pagesMTL107 Set7Ali RazaNo ratings yet
- #Include #Include Using Namespace Class Private StructDocument5 pages#Include #Include Using Namespace Class Private StructSupraja MadhvarajNo ratings yet
- Calcitriol IsDocument1 pageCalcitriol IsNoor Azni Abdul AzizNo ratings yet
- 05 Chemistry UG MODEL PAPERS ANU 2020-21Document8 pages05 Chemistry UG MODEL PAPERS ANU 2020-21Maria Rayappan S.No ratings yet
- SEPPO - KFT - Capabilities - WP-FL-WLP - 2017 - 1Document65 pagesSEPPO - KFT - Capabilities - WP-FL-WLP - 2017 - 1Julio AraujoNo ratings yet
- Atomic Structure: ENGR45 Materials Engineering Spring 04Document5 pagesAtomic Structure: ENGR45 Materials Engineering Spring 04KaliDasNo ratings yet
- 45.1.04 AOAC Official Method 970.64 Carotenes and Xanthophylls in Dried Plant Materials and Mixed FeedsDocument2 pages45.1.04 AOAC Official Method 970.64 Carotenes and Xanthophylls in Dried Plant Materials and Mixed Feedsphan lyNo ratings yet
- Chem Sketch GuideDocument12 pagesChem Sketch GuidennnxxxnnnNo ratings yet
- 8 Class GTSO Work Sheet - 1 (BASIC CONCEPTS OF CARTOGRAPHY)Document2 pages8 Class GTSO Work Sheet - 1 (BASIC CONCEPTS OF CARTOGRAPHY)Gurrapu SudhaNo ratings yet
- 7805 Sot 89 PDFDocument47 pages7805 Sot 89 PDFHimanshu SeerviNo ratings yet
- Project PPT (7 Sem)Document15 pagesProject PPT (7 Sem)AlexNo ratings yet
- LagundiDocument4 pagesLagundiAileen A. MonaresNo ratings yet
- Atonement in HebrewsDocument8 pagesAtonement in HebrewsJohn HornerNo ratings yet
- Slot06 07 CH04 CacheMemory 50 SlidesDocument50 pagesSlot06 07 CH04 CacheMemory 50 Slidestuan luuNo ratings yet
- CrwillDocument10 pagesCrwillRAMPRASAD YADAVNo ratings yet
- Rmcma - Rmcsa V1.0 PDFDocument25 pagesRmcma - Rmcsa V1.0 PDFhgfNo ratings yet
- Gen Math Week 3 ModuleDocument5 pagesGen Math Week 3 ModuleJazka Abegail NavaNo ratings yet
- Chakraborty 2018Document5 pagesChakraborty 2018iiee alcNo ratings yet
- A Process and Control Simulator For Large Scale Cryogenic PlantsDocument10 pagesA Process and Control Simulator For Large Scale Cryogenic PlantsLasse AhrendsenNo ratings yet
- InductionDocument22 pagesInductionomprakash8032No ratings yet
- Digital Video Camcorder: Nv-Gs6Ee Nv-Gs6GcDocument44 pagesDigital Video Camcorder: Nv-Gs6Ee Nv-Gs6GcDanNo ratings yet
- The Misconception About Radiologic Technology Regarding The Effects of Radiation in Reproductive Health. SynthesisDocument4 pagesThe Misconception About Radiologic Technology Regarding The Effects of Radiation in Reproductive Health. SynthesisCathleen Drew TuazonNo ratings yet
- Radiographic FilmDocument8 pagesRadiographic FilmwaelNo ratings yet
- POF Study Report Telephone ExchangeDocument10 pagesPOF Study Report Telephone ExchangeImran chNo ratings yet