You might also like
- Vertex Form Lesson 1Document2 pagesVertex Form Lesson 1neloNo ratings yet
- Off the Bookshelf Coloring Book: 45+ Weirdly Wonderful Designs to Color for Fun & RelaxationFrom EverandOff the Bookshelf Coloring Book: 45+ Weirdly Wonderful Designs to Color for Fun & RelaxationRating: 4.5 out of 5 stars4.5/5 (12)
- MHF4U Unit 1 Polynomial Functions HomeworkDocument31 pagesMHF4U Unit 1 Polynomial Functions HomeworkTony ParkNo ratings yet
- Instant Assessments for Data Tracking, Grade 3: MathFrom EverandInstant Assessments for Data Tracking, Grade 3: MathRating: 5 out of 5 stars5/5 (2)
- Module7 QgansDocument13 pagesModule7 Qgansdr.hassanalqanaziNo ratings yet
- Tutorial 8 - System of Equations - InequalitiesDocument29 pagesTutorial 8 - System of Equations - InequalitiesNguyễn Trọng HiếuNo ratings yet
- Direct VariationDocument4 pagesDirect VariationDNo ratings yet
- Basic Cartesian GraphsDocument10 pagesBasic Cartesian GraphsJesus David Sierra TaberaNo ratings yet
- Modeling Sequences with RNNs (part 1Document24 pagesModeling Sequences with RNNs (part 1Rahul VasanthNo ratings yet
- Asset-V1 - MITx 6.86x 1T2021 Type@asset Block@slides - Lecture10 - WithcreditsDocument25 pagesAsset-V1 - MITx 6.86x 1T2021 Type@asset Block@slides - Lecture10 - WithcreditsUttamNo ratings yet
- Quadratic Function-1Document8 pagesQuadratic Function-1Nabil MahdarNo ratings yet
- Beam Deflection and Structural Frame AnalysisDocument5 pagesBeam Deflection and Structural Frame AnalysisMar MartillanoNo ratings yet
- Exponentials PDFDocument9 pagesExponentials PDFAhmad ELZohairyNo ratings yet
- Logarithmic GraphsDocument2 pagesLogarithmic GraphsMelony KimNo ratings yet
- AcordesDocument9 pagesAcordesEdisson BenavidesNo ratings yet
- Buheidelberg PDFDocument30 pagesBuheidelberg PDFFriedrich FachmannNo ratings yet
- 3 - Equation of A LineDocument3 pages3 - Equation of A Linesmith0% (1)
- Worksheet - Graphing Sine and CosineDocument4 pagesWorksheet - Graphing Sine and CosineRudi BerlianNo ratings yet
- CMPT 413/713: Natural Language Processing: Nat LanglabDocument31 pagesCMPT 413/713: Natural Language Processing: Nat LanglabWenpei LiNo ratings yet
- Calculus of Variation Assignment-1 (J-2023)Document2 pagesCalculus of Variation Assignment-1 (J-2023)Sameer BhattaNo ratings yet
- Mcr3U Unit #7: Trigonometric Functions Section Numbers HomeworkDocument18 pagesMcr3U Unit #7: Trigonometric Functions Section Numbers HomeworkpersonNo ratings yet
- Lec 6Document30 pagesLec 6albisabu83No ratings yet
- Phonons PCGDocument143 pagesPhonons PCGTest PersonNo ratings yet
- Hannah Ness - Graphing+Pracitce+ (STUDENT)Document2 pagesHannah Ness - Graphing+Pracitce+ (STUDENT)Hannah NessNo ratings yet
- 02 - Graphs of Polynomial FunctionsDocument4 pages02 - Graphs of Polynomial FunctionsKristine HensonNo ratings yet
- The Equation For A Plane: 1 Planes Passing Through The OriginDocument3 pagesThe Equation For A Plane: 1 Planes Passing Through The OriginMohsin Iftikhar QureshiNo ratings yet
- PMU1 Assessment1Document1 pagePMU1 Assessment1Kaye ArcherNo ratings yet
- Today in Pre-Calculus: - Go Over Homework - Notes: (NO Calculators) - HomeworkDocument9 pagesToday in Pre-Calculus: - Go Over Homework - Notes: (NO Calculators) - HomeworkRejieNo ratings yet
- Parametric EquationsDocument4 pagesParametric EquationsJahangeerNo ratings yet
- a2_semester_2_review_answersDocument4 pagesa2_semester_2_review_answersrvmacroNo ratings yet
- 04 - 6 - Inverse Trig FunctionsDocument4 pages04 - 6 - Inverse Trig FunctionsSUNGMIN CHOINo ratings yet
- 0 + %loohw Ulqg: 0&& $& &rqwuro &lufxlwvDocument1 page0 + %loohw Ulqg: 0&& $& &rqwuro &lufxlwvMelissa MccallNo ratings yet
- Microsoft Word - 1.1 WorksheetDocument6 pagesMicrosoft Word - 1.1 WorksheetManya MNo ratings yet
- Suguna Pip School Class Test TitleDocument6 pagesSuguna Pip School Class Test TitleApoorvanNo ratings yet
- Inductive and Deductive ReasoningDocument52 pagesInductive and Deductive ReasoningEstiven GierNo ratings yet
- Diseño de Una Nave Industrial de 24 Metros: Alejandro PINO Fernando CoelloDocument1 pageDiseño de Una Nave Industrial de 24 Metros: Alejandro PINO Fernando CoellofernandoNo ratings yet
- Lecture 2Document69 pagesLecture 2erickNo ratings yet
- Find area of triangle using coordinatesDocument3 pagesFind area of triangle using coordinatesDIEGO MARTIN ROLANDO CORDOVA PINDAYNo ratings yet
- Samsung P2770H LS27EFN Manual ServiceDocument50 pagesSamsung P2770H LS27EFN Manual ServiceCharly NitroNo ratings yet
- Coordinate Frames: Beard & Mclain, "Small Unmanned Aircraft," Princeton University Press, 2012Document26 pagesCoordinate Frames: Beard & Mclain, "Small Unmanned Aircraft," Princeton University Press, 2012aslanım kralıçamNo ratings yet
- ECE 5984: Analysis of Power Distribution Line CapacitanceDocument14 pagesECE 5984: Analysis of Power Distribution Line Capacitanceante mitarNo ratings yet
- Melukis Grafik Garis LurusDocument2 pagesMelukis Grafik Garis LurusJeremy SuhendraNo ratings yet
- Evaluating Definite Integrals PDFDocument3 pagesEvaluating Definite Integrals PDFJose Barrera GaleraNo ratings yet
- Interpolation (Part I) : Simon Fraser University - Surrey Campus MACM 316 - Spring 2005 Instructor: Ha LeDocument31 pagesInterpolation (Part I) : Simon Fraser University - Surrey Campus MACM 316 - Spring 2005 Instructor: Ha LeAli RazaNo ratings yet
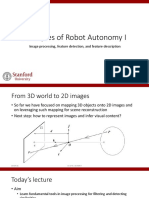
- Principles of Robot Autonomy I: Image Processing, Feature Detection, and Feature DescriptionDocument39 pagesPrinciples of Robot Autonomy I: Image Processing, Feature Detection, and Feature DescriptionratjerryNo ratings yet
- 03 - 1 - Graphing Exponential FunctionsDocument4 pages03 - 1 - Graphing Exponential FunctionsSUNGMIN CHOINo ratings yet
- Exp, Log 10 18hwDocument38 pagesExp, Log 10 18hwJiwoo ParkNo ratings yet
- 978-1-4673-4728-0/12/$31.00 ©2012 Ieee Apcc 2012 641Document6 pages978-1-4673-4728-0/12/$31.00 ©2012 Ieee Apcc 2012 641Soumitra BhowmickNo ratings yet
- Math Homework - Jail Population Probability ProblemDocument9 pagesMath Homework - Jail Population Probability ProblemRose SumbiNo ratings yet
- Summary of Lecture 1: "Let There Be Light"Document32 pagesSummary of Lecture 1: "Let There Be Light"Chandramouleeswaran SarmaNo ratings yet
- Sec V TS Mathematics Term 2 - Unit 2 - Absolute Value FunctionDocument16 pagesSec V TS Mathematics Term 2 - Unit 2 - Absolute Value FunctionDanyal PuglisiNo ratings yet
- Centroid: Centre of GravityDocument32 pagesCentroid: Centre of Gravitysalman husainNo ratings yet
- Processing Big Data: Kernel PCADocument75 pagesProcessing Big Data: Kernel PCAbytecodeNo ratings yet
- ដោះស្រាយវិសមីការតាមក្រាបដឺក្រេទី២Document2 pagesដោះស្រាយវិសមីការតាមក្រាបដឺក្រេទី២Sothea LyNo ratings yet
- Optional Unit 1 AssignmentDocument19 pagesOptional Unit 1 AssignmentTriet NguyenNo ratings yet
- ProbabilityDocument4 pagesProbabilityadarsh dhawanNo ratings yet
- Aula Separacao VariaveisDocument38 pagesAula Separacao VariaveisMatheus de Oliveira dos SantosNo ratings yet
- Lecture 14Document73 pagesLecture 14Sourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Descriptors, Feature Matching, Hough TransformDocument68 pagesEECE 5639 Computer Vision I: Descriptors, Feature Matching, Hough TransformSourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Planar Unwarping Project 2 Has Been PostedDocument57 pagesEECE 5639 Computer Vision I: Planar Unwarping Project 2 Has Been PostedSourabh Sisodia SrßNo ratings yet
- Lecture 16Document89 pagesLecture 16Sourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Hough Transform, Model Fitting, Planar Unwarping Hw3 Has Been PostedDocument62 pagesEECE 5639 Computer Vision I: Hough Transform, Model Fitting, Planar Unwarping Hw3 Has Been PostedSourabh Sisodia SrßNo ratings yet
- Canny Edge Detector ExplainedDocument58 pagesCanny Edge Detector ExplainedSourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Edge Detection, Corners Hw2 Has Been PostedDocument59 pagesEECE 5639 Computer Vision I: Edge Detection, Corners Hw2 Has Been PostedSourabh Sisodia SrßNo ratings yet
- Lecture 12Document68 pagesLecture 12Sourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Non Linear Filtering For Noise Cleaning, EdgesDocument67 pagesEECE 5639 Computer Vision I: Non Linear Filtering For Noise Cleaning, EdgesSourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Coordinate Systems Transformations, ColorDocument50 pagesEECE 5639 Computer Vision I: Coordinate Systems Transformations, ColorSourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Filtering, Noise Cleaning, Separable FiltersDocument49 pagesEECE 5639 Computer Vision I: Filtering, Noise Cleaning, Separable FiltersSourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Filtering, Probability ReviewDocument54 pagesEECE 5639 Computer Vision I: Filtering, Probability ReviewSourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Color, FilteringDocument51 pagesEECE 5639 Computer Vision I: Color, FilteringSourabh Sisodia SrßNo ratings yet
- Edge Detection: 1) Noise Reduction 2) Edge Enhancement 3) Edge LocalisationDocument8 pagesEdge Detection: 1) Noise Reduction 2) Edge Enhancement 3) Edge LocalisationJayram Deepak100% (1)
- CS231A Epipolar Geometry Notes: Camera Geometry ConstraintsDocument14 pagesCS231A Epipolar Geometry Notes: Camera Geometry Constraintslolopopo28No ratings yet
- Development of Wireless Electronic Voting Machine As An Effective Enhancement of Voting System SecurityDocument5 pagesDevelopment of Wireless Electronic Voting Machine As An Effective Enhancement of Voting System SecuritySourabh Sisodia SrßNo ratings yet
- Concept of The Art Using NEW TechnologiesDocument16 pagesConcept of The Art Using NEW TechnologiesCatherine RenanteNo ratings yet
- List of Some Important AutoCAD CommandsDocument4 pagesList of Some Important AutoCAD CommandsepfodeoNo ratings yet
- CE13001 Introduction PDFDocument39 pagesCE13001 Introduction PDFAbhinaba SahaNo ratings yet
- Computer Graphics JNTU Question PaperDocument4 pagesComputer Graphics JNTU Question PapermannanabdulsattarNo ratings yet
- Flash Tweening Guide: Motion, Shape & Classic Tweens ExplainedDocument7 pagesFlash Tweening Guide: Motion, Shape & Classic Tweens ExplainedJovzNo ratings yet
- Mastercam 2017 Mill Advanced Training Tutorial SAMPLE PDFDocument36 pagesMastercam 2017 Mill Advanced Training Tutorial SAMPLE PDFsekhon875115No ratings yet
- TOA ScriptDocument2 pagesTOA ScriptAmitabha SinghNo ratings yet
- Bleem BLEEM! User ManualDocument23 pagesBleem BLEEM! User ManualefwetyehNo ratings yet
- Computer Aided Machine DrawingDocument6 pagesComputer Aided Machine DrawingHarmish BhattNo ratings yet
- Unit IV Geometric TransformationDocument31 pagesUnit IV Geometric Transformationvishwajeet patilNo ratings yet
- Final 2D Transformations Heran Baker NewDocument64 pagesFinal 2D Transformations Heran Baker NewImmensely IndianNo ratings yet
- Lesson 4Document30 pagesLesson 4api-241156742No ratings yet
- CurriculumDocument184 pagesCurriculumpandsvathiNo ratings yet
- Guide to Loading Data in ParaviewDocument42 pagesGuide to Loading Data in ParaviewGustavoYippeekayyayGusNo ratings yet
- Computer Numerical Control: TransformationsDocument56 pagesComputer Numerical Control: TransformationsibraheemNo ratings yet
- 3D Viewing and ClippingCGDocument40 pages3D Viewing and ClippingCGSwapnil BarapatreNo ratings yet
- FIRE 2D SketcherDocument24 pagesFIRE 2D Sketchermailforvenkat3013No ratings yet
- IT ITES Policy 2015 Final English PDFDocument35 pagesIT ITES Policy 2015 Final English PDFAkshay KhanzodeNo ratings yet
- CAMSHIFT Tracking Algorithm: CSE/EE 486: Computer Vision I Computer Project Report #: Project 5Document7 pagesCAMSHIFT Tracking Algorithm: CSE/EE 486: Computer Vision I Computer Project Report #: Project 5Engr EbiNo ratings yet
- AutoCAD ppt-5 AutoCAD Three-Dimensional DrawingDocument21 pagesAutoCAD ppt-5 AutoCAD Three-Dimensional DrawingBereket ArayaNo ratings yet
- 10 Module in ArtDocument31 pages10 Module in ArtNestor ConarcoNo ratings yet
- Dani Cavallaro - Anime Intersections: Tradition and Innovation in Theme and TechniqueDocument216 pagesDani Cavallaro - Anime Intersections: Tradition and Innovation in Theme and Techniqueleroi77100% (2)
- 2D Transformations: 3.1 TransformationDocument29 pages2D Transformations: 3.1 TransformationRokey AhmedNo ratings yet
- BitsDocument40 pagesBitsPradeep Kumar Kanithi100% (1)
- Multiple Rotating Frame TutorialDocument20 pagesMultiple Rotating Frame TutorialBadhriNarayananNo ratings yet
- Computer Graphics Hand Book of IV CSE JNTUH 2013Document23 pagesComputer Graphics Hand Book of IV CSE JNTUH 2013gouse1210No ratings yet
- Creating GDL Objects E-GuideDocument192 pagesCreating GDL Objects E-GuideVali EnciuNo ratings yet
- Mimics Student Edition Course BookDocument83 pagesMimics Student Edition Course Bookleobia100% (1)
- Computer Graphics LabDocument43 pagesComputer Graphics LabMD Mehraj HossainNo ratings yet
- Get admission in computer courses and earn a degree after examsDocument2 pagesGet admission in computer courses and earn a degree after examsShahbaz HassanNo ratings yet