You might also like
- Analysis of Facial Expression Using Gabor and SVM: Praseeda Lekshmi.V - , Dr.M.SasikumarDocument4 pagesAnalysis of Facial Expression Using Gabor and SVM: Praseeda Lekshmi.V - , Dr.M.SasikumarRahSamNo ratings yet
- Smart Attendance Monitoring System (SAMS) A Face RecognitionDocument3 pagesSmart Attendance Monitoring System (SAMS) A Face RecognitionرمقالحياةNo ratings yet
- Ai Report AnjaniDocument6 pagesAi Report AnjaniPrathish MNo ratings yet
- Missing Child 4Document6 pagesMissing Child 4mohsin asmaNo ratings yet
- I Jcs It 2015060108Document3 pagesI Jcs It 2015060108Ramdhan MuhammadNo ratings yet
- Improved Palmprint Authentication Using Contactless Imaging: Aythami Morales, Miguel A. FerrerDocument6 pagesImproved Palmprint Authentication Using Contactless Imaging: Aythami Morales, Miguel A. FerrerAkash HulkodNo ratings yet
- 3 Conf 2009 Icccp7Document5 pages3 Conf 2009 Icccp7ZahirNo ratings yet
- Multi-Modal Human Verification Using Face and SpeechDocument6 pagesMulti-Modal Human Verification Using Face and SpeechIkram CheboutNo ratings yet
- Multimodal Biometric System Based Palmprzint and IrisDocument5 pagesMultimodal Biometric System Based Palmprzint and IrisRaj LoVeNo ratings yet
- Biometric Recognition Using Face, Ear & GaitDocument4 pagesBiometric Recognition Using Face, Ear & GaitMadhur BharatNo ratings yet
- WebMedia CarolinaWatanabe Et AlDocument8 pagesWebMedia CarolinaWatanabe Et AlCarolina WatanabeNo ratings yet
- A Survey of Facial Expression Recognition Methods: Shail Kumari ShahDocument5 pagesA Survey of Facial Expression Recognition Methods: Shail Kumari ShahIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Application of The OpenCV-Python For Personal Identifier StatementDocument4 pagesApplication of The OpenCV-Python For Personal Identifier StatementMuzammil NaeemNo ratings yet
- Matlab PDFDocument12 pagesMatlab PDFNaveen Kumar RavillaNo ratings yet
- Multimodal Biometric System Using Face, Ear and Gait BiometricsDocument4 pagesMultimodal Biometric System Using Face, Ear and Gait Biometricsبورنان محمدNo ratings yet
- A Survey On Feature Extraction Techniques For Palmprint IdentificationDocument5 pagesA Survey On Feature Extraction Techniques For Palmprint IdentificationInternational Journal of computational Engineering research (IJCER)No ratings yet
- 673-Article Text-2075-1-10-20220517Document10 pages673-Article Text-2075-1-10-20220517Electro18 GTNo ratings yet
- Face Detection Using Gabor Feature Extraction and Artificial Neural NetworkDocument6 pagesFace Detection Using Gabor Feature Extraction and Artificial Neural NetworkParthiban A.PNo ratings yet
- Palmprint Identification Using Feature-Level Fusion: Adams Kong, David Zhang, Mohamed KamelDocument10 pagesPalmprint Identification Using Feature-Level Fusion: Adams Kong, David Zhang, Mohamed KamelSally SamehNo ratings yet
- Wild Image Classification With AiDocument23 pagesWild Image Classification With AibazeeshaikngmNo ratings yet
- A New Approach For Face Image Enhancement and RecognitionDocument10 pagesA New Approach For Face Image Enhancement and RecognitionDinesh PudasainiNo ratings yet
- Performance Evaluation of Selected Feature Extraction Techniques in Digital Face Image ProcessingDocument9 pagesPerformance Evaluation of Selected Feature Extraction Techniques in Digital Face Image ProcessingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Palmprint Authentication Using Modified Legendre MomentsDocument9 pagesPalmprint Authentication Using Modified Legendre MomentsGábor PatakiNo ratings yet
- Fabric Defect Detection Using Local Homogeneity and Morphological Image ProcessingDocument5 pagesFabric Defect Detection Using Local Homogeneity and Morphological Image ProcessingherusyahputraNo ratings yet
- Blur and Motion Blur Influence On Face Recognition PerformanceDocument5 pagesBlur and Motion Blur Influence On Face Recognition PerformanceDhanya BNo ratings yet
- Local Binary Patterns and Its Variants For Face RecognitionDocument5 pagesLocal Binary Patterns and Its Variants For Face Recognitionmaleksd111No ratings yet
- Examplers Based Image Fusion Features For Face RecognitionDocument13 pagesExamplers Based Image Fusion Features For Face RecognitiondanangkitaNo ratings yet
- Embedded System Design For Visual Scene Classification: Abstract - Computer Vision and Robotics Community IsDocument5 pagesEmbedded System Design For Visual Scene Classification: Abstract - Computer Vision and Robotics Community IsAli WaqasNo ratings yet
- 2011 Springer FKP MeraoumiaDocument11 pages2011 Springer FKP MeraoumiaRitu JangraNo ratings yet
- T PaperDocument67 pagesT Paperidris_ali_7No ratings yet
- Icip 2009Document4 pagesIcip 2009PratikNo ratings yet
- Image-Based Face Detection and Recognition: "State of The Art"Document4 pagesImage-Based Face Detection and Recognition: "State of The Art"Amina Muhammad AminNo ratings yet
- Feature and Decision Fusion Based Facial Recognition in Challenging EnvironmentDocument6 pagesFeature and Decision Fusion Based Facial Recognition in Challenging Environmentpayel777No ratings yet
- Rotation Invariant Face Recognition Using RLBP, LPQ and CONTOURLET TransformDocument6 pagesRotation Invariant Face Recognition Using RLBP, LPQ and CONTOURLET TransformAnonymous kw8Yrp0R5rNo ratings yet
- Face Detection System On AdaBoost Algorithm Using HaarDocument5 pagesFace Detection System On AdaBoost Algorithm Using HaarJack McKnightNo ratings yet
- Vision-Face Recognition Attendance Monitoring System For Surveillance Using Deep Learning Technology and Computer VisionDocument5 pagesVision-Face Recognition Attendance Monitoring System For Surveillance Using Deep Learning Technology and Computer VisionShanthi GanesanNo ratings yet
- Mango Grading Based On Size Using Image ProcessingDocument40 pagesMango Grading Based On Size Using Image ProcessingdubstepoNo ratings yet
- 1 A Discriminative Model For Age Invariant Face RecognitionDocument10 pages1 A Discriminative Model For Age Invariant Face Recognitionvenkata rao RampayNo ratings yet
- Hybrid Features Based Face Recognition Method Using Artificial Neural NetworkDocument8 pagesHybrid Features Based Face Recognition Method Using Artificial Neural NetworkmariauxiliumNo ratings yet
- Human Face Detection and Recognition Using Web-CamDocument9 pagesHuman Face Detection and Recognition Using Web-CamKelly De Leon TuliaoNo ratings yet
- Facial Smile Detection Based On Deep Learning FeaturesDocument5 pagesFacial Smile Detection Based On Deep Learning FeaturesMEET SHAHNo ratings yet
- A Deep Learning Approach For Face Detection and LoDocument7 pagesA Deep Learning Approach For Face Detection and LoTemitayo Olutimi EjidokunNo ratings yet
- Real Time Face DetectionDocument5 pagesReal Time Face DetectionPhat TongNo ratings yet
- Currency Recognition On Mobile Phones Proposed System ModulesDocument26 pagesCurrency Recognition On Mobile Phones Proposed System Moduleshab_dsNo ratings yet
- A Comparative Study Between LBP and Haar-Like Features For Face Detection Using OpencvDocument5 pagesA Comparative Study Between LBP and Haar-Like Features For Face Detection Using OpencvHuzaifa TahirNo ratings yet
- A Noval Approach For Face Spoof Detection Using Color-Texture, Distortion and Quality ParametersDocument3 pagesA Noval Approach For Face Spoof Detection Using Color-Texture, Distortion and Quality ParametersEditor IJRITCCNo ratings yet
- Facial Expression Recognition Using Artificial Neural NetworksDocument6 pagesFacial Expression Recognition Using Artificial Neural NetworksInternational Organization of Scientific Research (IOSR)No ratings yet
- A Real-Time Face Recognition System Using Eigenfaces: Daniel GeorgescuDocument12 pagesA Real-Time Face Recognition System Using Eigenfaces: Daniel GeorgescuAlex SisuNo ratings yet
- Real-Time Embedded Age and Gender Classification in Unconstrained VideoDocument9 pagesReal-Time Embedded Age and Gender Classification in Unconstrained VideoAnil Kumar BNo ratings yet
- Palm Verification Using Sift and Majority Voting Based KNNDocument4 pagesPalm Verification Using Sift and Majority Voting Based KNNPasindu AbeysunderaNo ratings yet
- Fundamentals of Face Recognition TechniquesDocument34 pagesFundamentals of Face Recognition Techniquesfaker888No ratings yet
- Project Report: Topic: Real Time Facial Expression RecognitionDocument24 pagesProject Report: Topic: Real Time Facial Expression RecognitionHarsih KangaNo ratings yet
- 3 Conf 2009 Icccp6Document5 pages3 Conf 2009 Icccp6ZahirNo ratings yet
- LAB MANUAL 2D1427 Image Based RecognitioDocument25 pagesLAB MANUAL 2D1427 Image Based RecognitioLucky SaxenaNo ratings yet
- Application of Image Processing To The Characterisation of NanostructuresDocument9 pagesApplication of Image Processing To The Characterisation of NanostructuresBK CbeNo ratings yet
- Project Report: Topic: Real Time Facial Expression RecognitionDocument25 pagesProject Report: Topic: Real Time Facial Expression RecognitionHarsih KangaNo ratings yet
- Pyramid Image Processing: Exploring the Depths of Visual AnalysisFrom EverandPyramid Image Processing: Exploring the Depths of Visual AnalysisNo ratings yet
- Inpainting and Denoising ChallengesFrom EverandInpainting and Denoising ChallengesSergio EscaleraNo ratings yet
- Tone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionFrom EverandTone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionNo ratings yet
- (Google Ads) Optimization - Creative - Creative For Display - Best PractiseDocument42 pages(Google Ads) Optimization - Creative - Creative For Display - Best PractiseMohammad SajjadNo ratings yet
- Assignment 2 New MediaDocument6 pagesAssignment 2 New MediaJishan ShaikhNo ratings yet
- Color Management Presets in Roland VersaWorks PDFDocument7 pagesColor Management Presets in Roland VersaWorks PDFDamien OlverNo ratings yet
- YCb CRDocument4 pagesYCb CRsheetal2689No ratings yet
- Harvard Crimson Commencement Rate Card (B) - CompressedDocument9 pagesHarvard Crimson Commencement Rate Card (B) - CompressedCynthia LuNo ratings yet
- Comparison of HOG, MSER, SIFT, FAST, LBP and CANNY Features For Cell Detection in Histopathological ImagesDocument6 pagesComparison of HOG, MSER, SIFT, FAST, LBP and CANNY Features For Cell Detection in Histopathological ImagesJake CloneyNo ratings yet
- Sharp LC-60LE745U CNET Review Calibration ResultsDocument7 pagesSharp LC-60LE745U CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Modul 7Document12 pagesModul 7Yudistira WillimraNo ratings yet
- 42E820UDocument148 pages42E820UElias moreira camposNo ratings yet
- CMYK V RGB Colour PrintingDocument3 pagesCMYK V RGB Colour PrintingmaryNo ratings yet
- Musnell Colour SystemDocument55 pagesMusnell Colour SystemMohammad RawoofNo ratings yet
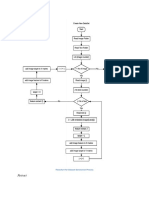
- Fextract: Flowchart For Dataset Generation ProcessDocument5 pagesFextract: Flowchart For Dataset Generation ProcessTanveer AkhtarNo ratings yet
- Modelo de Cor RGBDocument15 pagesModelo de Cor RGBbdromeiraNo ratings yet
- Blackbody Color DatafileDocument27 pagesBlackbody Color DatafilechiuhereNo ratings yet
- Color 1 Color 2 Color 3 Color 4 Color 5Document8 pagesColor 1 Color 2 Color 3 Color 4 Color 5Mr. FerreiraNo ratings yet
- Computer Vision Algorithm Development For Classification of Palm Fruit RipenessDocument9 pagesComputer Vision Algorithm Development For Classification of Palm Fruit RipenessMohammed Al-KuhaliNo ratings yet
- Color Palette Blue and YellowDocument4 pagesColor Palette Blue and YellowdresscodebytereNo ratings yet
- Sony KDL-55NX720 CNET Review Calibration ResultsDocument7 pagesSony KDL-55NX720 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- MS EmfDocument305 pagesMS EmfpcpaterNo ratings yet
- 2018 Iqbal, An Automated Detection and Classification of Citrus Plant Diseases UsingDocument21 pages2018 Iqbal, An Automated Detection and Classification of Citrus Plant Diseases UsingShahid Amir LakNo ratings yet
- Rio SDocument12 pagesRio SErni ErawatiNo ratings yet
- Road Traffic Sign Detection and ClassificationDocument12 pagesRoad Traffic Sign Detection and ClassificationsoultaduNo ratings yet
- Color SpaceDocument63 pagesColor Spaceroman663No ratings yet
- 2005 PDFDocument739 pages2005 PDFShkahi Saud ShkahiNo ratings yet
- PatchTool HelpDocument0 pagesPatchTool Helpq8zzzzzzzzzzzzzzzzzzNo ratings yet
- Samsung LE40B620Document458 pagesSamsung LE40B620Babax69No ratings yet
- Samsung PN59D7000 CNET Review Calibration ResultsDocument7 pagesSamsung PN59D7000 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- AMME4710 Chap5 ColourIPDocument56 pagesAMME4710 Chap5 ColourIPrajeevrajkumarNo ratings yet
- Faults Detection With Image Processing Methods in Textile SectorDocument6 pagesFaults Detection With Image Processing Methods in Textile Sectorrabiya asifNo ratings yet
- CANON EOS 350D Service and PartsDocument200 pagesCANON EOS 350D Service and PartsDr. Stan Wardel BA, MA, MChem, MBA, DPhil, DSc.0% (1)