You might also like
- Rebreathers and Scientific Diving Proceedings 2016Document277 pagesRebreathers and Scientific Diving Proceedings 2016dusan cincar0% (1)
- Saej1459v004 PDFDocument9 pagesSaej1459v004 PDFvishalNo ratings yet
- Acoustic Seafloor MappingDocument18 pagesAcoustic Seafloor MappingmanishbabuNo ratings yet
- Remote SensingDocument26 pagesRemote SensingPIBRACNo ratings yet
- A Wide-Area Deep Ocean Floor Mapping System DesignDocument22 pagesA Wide-Area Deep Ocean Floor Mapping System DesignThomas ThomasNo ratings yet
- The Development of the Multibeam Echosounder: A Historical AccountDocument2 pagesThe Development of the Multibeam Echosounder: A Historical AccountKim Kiki ZaenuriNo ratings yet
- Marine and Land Seismic AquisitionDocument3 pagesMarine and Land Seismic AquisitionMiko Rc SevenNo ratings yet
- Remotesensing 12 04076 v2Document23 pagesRemotesensing 12 04076 v2Matt HoulsonNo ratings yet
- Use of Echosounders in Marine Archaeolog PDFDocument6 pagesUse of Echosounders in Marine Archaeolog PDFsyahna rahmahNo ratings yet
- Deep Ocean Long Range Underwater Navigation: Articles You May Be Interested inDocument19 pagesDeep Ocean Long Range Underwater Navigation: Articles You May Be Interested inMustafa Kemal AmbarNo ratings yet
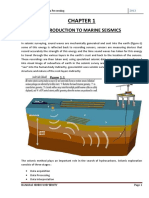
- Final Dissertation Introduction To Marine Seismics PDFDocument66 pagesFinal Dissertation Introduction To Marine Seismics PDFjast5No ratings yet
- The Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyDocument10 pagesThe Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyvesmsxNo ratings yet
- Shooting Seismic Surveys in CirclesDocument14 pagesShooting Seismic Surveys in CirclesRidwanNo ratings yet
- Bathymetry ThesisDocument7 pagesBathymetry ThesisBuyCheapPapersOnlineSingapore100% (2)
- Coastline Change Detection Using Unmanned Aerial Vehicles andDocument9 pagesCoastline Change Detection Using Unmanned Aerial Vehicles andhaikal shopeeNo ratings yet
- Sensors: Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 ImagesDocument20 pagesSensors: Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 ImagesLennert PronkNo ratings yet
- Administrator, 1043799arDocument16 pagesAdministrator, 1043799arvesmsxNo ratings yet
- Contoh Journal ReviewDocument6 pagesContoh Journal ReviewMuchammad Misbachul MunirNo ratings yet
- Sonar Systems and Their Many UsesDocument4 pagesSonar Systems and Their Many UsesshirtquittersNo ratings yet
- Mapping Overview: Hydro Acoustic Surveys Fine Scale SurveysDocument8 pagesMapping Overview: Hydro Acoustic Surveys Fine Scale SurveysdarshowlkatNo ratings yet
- Accuracy of nautical charts - How reliable is cartographic informationDocument5 pagesAccuracy of nautical charts - How reliable is cartographic informationOrlando Quevedo100% (1)
- General Facts About The Lidar TechniqueDocument29 pagesGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- C - 1 Hydro BasicDocument25 pagesC - 1 Hydro BasicZannatul NayemaNo ratings yet
- Zhao 2008Document9 pagesZhao 2008gasfdgdf fgasdfgNo ratings yet
- Cetn II 31 GrosskopfDocument12 pagesCetn II 31 GrosskopfblaNo ratings yet
- Coral Reef: Remote Sensing ApplicationsDocument13 pagesCoral Reef: Remote Sensing ApplicationsYennie MariniNo ratings yet
- Sean Surface Salinity-1Document1 pageSean Surface Salinity-1kokakolakkiyaNo ratings yet
- Paper1-UNDERWATER Acoustic Positioning SystemDocument33 pagesPaper1-UNDERWATER Acoustic Positioning SystemNovi AniNo ratings yet
- Backscatter Responses and Resolution Considerations in Archaeological Side-Scan Sonar Surveys: A Control ExperimentDocument13 pagesBackscatter Responses and Resolution Considerations in Archaeological Side-Scan Sonar Surveys: A Control ExperimentgkuttsikNo ratings yet
- Geophysical Survey ResearchDocument19 pagesGeophysical Survey Researchcharles IkeNo ratings yet
- Bathymetry TalksDocument16 pagesBathymetry TalksEmmanuel WusuNo ratings yet
- New Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsDocument9 pagesNew Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsAmnaTariqNo ratings yet
- Geoacoustic Inversion Using An Autonomous Underwater Vehicle in Conjunction With Distributed SensorsDocument23 pagesGeoacoustic Inversion Using An Autonomous Underwater Vehicle in Conjunction With Distributed SensorsJose Leonardo Simancas GarciaNo ratings yet
- Measurement of Radiated Ship Noise PDFDocument10 pagesMeasurement of Radiated Ship Noise PDFBùi Trường GiangNo ratings yet
- Sensors 12 03693 Tabla ResumenDocument27 pagesSensors 12 03693 Tabla ResumenmapasabcNo ratings yet
- 001432Document6 pages001432Antonius SatrioNo ratings yet
- (Paperhub - Ir) 10.1088 1757-899x 209 1 012098Document11 pages(Paperhub - Ir) 10.1088 1757-899x 209 1 012098Rebecca JohnsonNo ratings yet
- Submarine Mapping Using Multibeam BathymetryDocument5 pagesSubmarine Mapping Using Multibeam BathymetrySil Alba0% (1)
- Residual Oil Saturation: The Information You Should Know About SeismicDocument9 pagesResidual Oil Saturation: The Information You Should Know About SeismicOnur AkturkNo ratings yet
- Multiplying The Effectiveness of Naval ASWDocument5 pagesMultiplying The Effectiveness of Naval ASWBùi Trường GiangNo ratings yet
- Fonseca 07 MGR Remote Estimation of Surficial Seafloor Properties Through Angular Range Analysis PDFDocument8 pagesFonseca 07 MGR Remote Estimation of Surficial Seafloor Properties Through Angular Range Analysis PDFazhafizNo ratings yet
- Oil and Gas Exploration Methods: Geological & GeophysicalDocument7 pagesOil and Gas Exploration Methods: Geological & GeophysicalAsad KhanNo ratings yet
- Large Aperture Low Cost Hydrophone Array For Tracking Whales From Small BoatsDocument10 pagesLarge Aperture Low Cost Hydrophone Array For Tracking Whales From Small BoatsBrendon SoongNo ratings yet
- Marine Electrical Resistivity TomographyDocument10 pagesMarine Electrical Resistivity Tomographyjose razoNo ratings yet
- Tugas 01 KL 3103 Pengumpulan Dan Data Analisis Lapangan: Irsan Soemantri B. PH.DDocument8 pagesTugas 01 KL 3103 Pengumpulan Dan Data Analisis Lapangan: Irsan Soemantri B. PH.DMuhammad Wahid SiddikNo ratings yet
- Dierssen 2014 ENRMethods ColorDocument9 pagesDierssen 2014 ENRMethods ColorDeepak KumarNo ratings yet
- Analysis of Single Beam, Multibeam and Sidescan Sonar Data For Benthic Habitat Classification in The Southern Baltic SeaDocument8 pagesAnalysis of Single Beam, Multibeam and Sidescan Sonar Data For Benthic Habitat Classification in The Southern Baltic SeaazhafizNo ratings yet
- High Resolution Sentinel-2 Images For Improved Bathymetric Mapping of Coastal and Lake EnvironmentsDocument19 pagesHigh Resolution Sentinel-2 Images For Improved Bathymetric Mapping of Coastal and Lake EnvironmentshamadNo ratings yet
- Exploration: of The Ocean BasinsDocument3 pagesExploration: of The Ocean BasinsSergs jonelNo ratings yet
- Remote Sensing in Submarine Archaeology and Marine Cultural Resources Management An Ancient Shipwreck Outside Zakynthos Port, GreeceDocument9 pagesRemote Sensing in Submarine Archaeology and Marine Cultural Resources Management An Ancient Shipwreck Outside Zakynthos Port, GreeceMaria DiamantopoulouNo ratings yet
- Thode Et Al 2019 Displaying+bioacoustic+directional+info+sonobuoys+azigramsDocument8 pagesThode Et Al 2019 Displaying+bioacoustic+directional+info+sonobuoys+azigramsRaiciard ManoleNo ratings yet
- Dams EvaluationDocument92 pagesDams EvaluationmidoNo ratings yet
- Lecture 4B Year 3-Sounding - Depth DeterminationDocument19 pagesLecture 4B Year 3-Sounding - Depth Determinationlegendibra8No ratings yet
- UAV-Derived Multispectral BathymetryDocument20 pagesUAV-Derived Multispectral BathymetryCRISTINA QUISPENo ratings yet
- 0302 Remote SensingDocument14 pages0302 Remote SensingRiskahMappileNo ratings yet
- DAS Submarine Structural CharacterizationDocument14 pagesDAS Submarine Structural Characterizationhoniwi3818No ratings yet
- Use of Remote Sensing Data For Archaeological LandscapesDocument10 pagesUse of Remote Sensing Data For Archaeological LandscapesZenón Rizo FernándezNo ratings yet
- Gao 2009Document15 pagesGao 2009Jamhur SudjanaNo ratings yet
- Marine Geological Surveying and SamplingDocument168 pagesMarine Geological Surveying and SamplingtracksolucionesNo ratings yet
- Assigment GSS411 Branches of Geomatics 2022977645Document13 pagesAssigment GSS411 Branches of Geomatics 2022977645MUHAMMAD NADZIF SAHIMINo ratings yet
- MGDAPAI Guidance NotesDocument49 pagesMGDAPAI Guidance NotesDarko KovacevicNo ratings yet
- HFF Report - Social Economic Value of Marine and Maritime Cultural HeritageDocument66 pagesHFF Report - Social Economic Value of Marine and Maritime Cultural HeritageDarko KovacevicNo ratings yet
- Fa Et Al 2011 Applying A Conservation Prioritization Approach To Submerged and Coastal Heritage SitesDocument10 pagesFa Et Al 2011 Applying A Conservation Prioritization Approach To Submerged and Coastal Heritage SitesDarko KovacevicNo ratings yet
- Managing Shipwrecks: Antony FirthDocument48 pagesManaging Shipwrecks: Antony FirthDarko KovacevicNo ratings yet
- EOWR KS-1X Combine 08may2008Document73 pagesEOWR KS-1X Combine 08may2008Them Bui XuanNo ratings yet
- Introduction to GIS Coordinate Systems and Map ProjectionsDocument18 pagesIntroduction to GIS Coordinate Systems and Map ProjectionsAqil FadzilNo ratings yet
- Leveling Fundamentals ExplainedDocument20 pagesLeveling Fundamentals ExplainedRanier Andrei VillanuevaNo ratings yet
- The Transit: Navigation Satellite SystemDocument85 pagesThe Transit: Navigation Satellite Systemjtek01No ratings yet
- OGP 373-18-1 Guidelines For Offshore Drilling SurveysDocument38 pagesOGP 373-18-1 Guidelines For Offshore Drilling SurveysJose Quintero0% (1)
- LandStar7 Manual 0912Document105 pagesLandStar7 Manual 0912yekangNo ratings yet
- POSPac MMS - Release - NotesDocument59 pagesPOSPac MMS - Release - NotesFilip SkultetyNo ratings yet
- Flooding Banyo Flood Flag MapDocument1 pageFlooding Banyo Flood Flag MapNgaire TaylorNo ratings yet
- RW 17Document130 pagesRW 17wdtalampasNo ratings yet
- ECDIS Legal Aspects NumericChart ENC RNCDocument57 pagesECDIS Legal Aspects NumericChart ENC RNCBalasi SimonaNo ratings yet
- Topographic Map of EdgewoodDocument1 pageTopographic Map of EdgewoodHistoricalMapsNo ratings yet
- Disclosure To Promote The Right To InformationDocument26 pagesDisclosure To Promote The Right To InformationKatie RamirezNo ratings yet
- Etrex H: Personal NavigatorDocument32 pagesEtrex H: Personal NavigatormtheriotNo ratings yet
- Bulls Eye Lab-Physics2013Document3 pagesBulls Eye Lab-Physics2013api-267685991No ratings yet
- Proposed Site Survey and Soil TestingDocument6 pagesProposed Site Survey and Soil TestingArnel DodongNo ratings yet
- Kotsakis Etal EGM2008 Rep.2008 PDFDocument0 pagesKotsakis Etal EGM2008 Rep.2008 PDFDimitris GoulasNo ratings yet
- Tunnel 05 - Construction of Tunnels - Part 2Document65 pagesTunnel 05 - Construction of Tunnels - Part 2Andika Febrian0% (1)
- Urban Legal Cadaster StandardDocument41 pagesUrban Legal Cadaster StandardDesu GashuNo ratings yet
- Marine Geodesy-Karl Rinner PDFDocument50 pagesMarine Geodesy-Karl Rinner PDFFirNo ratings yet
- Compulsory Part Paper 2 Question No. Key Question No. KeyDocument10 pagesCompulsory Part Paper 2 Question No. Key Question No. KeyJOSEPHINENo ratings yet
- Autocad Civil 3D HelpDocument73 pagesAutocad Civil 3D HelpAndreaRebecaNo ratings yet
- JLR-7500/7800 GPS Navigator ManualDocument226 pagesJLR-7500/7800 GPS Navigator ManualMoises BermudezNo ratings yet
- Grids & Datums Republic of Indonesia - 10-2009 - Clifford J. MugnierDocument3 pagesGrids & Datums Republic of Indonesia - 10-2009 - Clifford J. MugnierSuta VijayaNo ratings yet
- HyperGraph 2DDocument378 pagesHyperGraph 2DSantiago UrgilesNo ratings yet
- How to create a globe insert map for QGIS and ArcGIS ProDocument2 pagesHow to create a globe insert map for QGIS and ArcGIS ProRalph Lauren AbainzaNo ratings yet
- Comparing IT Infrastructure Management ToolsDocument47 pagesComparing IT Infrastructure Management ToolsMiko DeleonNo ratings yet
- CRZ Port Blair FortuneDocument19 pagesCRZ Port Blair FortuneNEFSYA KAMALNo ratings yet
- Peta Topografi PT TISDocument1 pagePeta Topografi PT TISanwarNo ratings yet