You might also like
- The Nature of Substance - Rudolf Hauschka PDFDocument250 pagesThe Nature of Substance - Rudolf Hauschka PDFBruno Morin100% (5)
- Emath and Amath FormulaDocument21 pagesEmath and Amath FormulaveryveryhappyfeetNo ratings yet
- Mae 331 Lecture 9Document8 pagesMae 331 Lecture 9Niteesh MehraNo ratings yet
- Euler Angle Rates: Aircraft Equations of Motion - 2Document9 pagesEuler Angle Rates: Aircraft Equations of Motion - 2Ali AkbarNo ratings yet
- MAE331Lecture8 PDFDocument24 pagesMAE331Lecture8 PDFPranav BhardwajNo ratings yet
- Robotics 1 - Minimal Representations of OrientationDocument14 pagesRobotics 1 - Minimal Representations of OrientationAland BravoNo ratings yet
- Quaternions & IMU Sensor Fusion With Complementary Filtering PDFDocument51 pagesQuaternions & IMU Sensor Fusion With Complementary Filtering PDFjordimon1234No ratings yet
- Geometric Transformations in OpenGLDocument44 pagesGeometric Transformations in OpenGLWinnie TandaNo ratings yet
- Electromagnetic Theory Basic PDFDocument29 pagesElectromagnetic Theory Basic PDFPranay ShuklaNo ratings yet
- Aircraft Flight Dynamics Equations of MotionDocument34 pagesAircraft Flight Dynamics Equations of MotionWii RodriguezNo ratings yet
- Potential Flow Equations and MethodsDocument3 pagesPotential Flow Equations and MethodsgetsweetNo ratings yet
- Analytical AT-3Document48 pagesAnalytical AT-3BELAY TAFACHUNo ratings yet
- 4-Component " Lateral-Directional Equations of Motion"Document11 pages4-Component " Lateral-Directional Equations of Motion"Felipe Balboa PolancoNo ratings yet
- 03_2019-10-14_ScrewTheoryDocument9 pages03_2019-10-14_ScrewTheoryfakihilham2705No ratings yet
- Inertial Measurement Units II: Gordon Wetzstein! Stanford University!Document37 pagesInertial Measurement Units II: Gordon Wetzstein! Stanford University!mNo ratings yet
- Linearized Equations of Motion PDFDocument33 pagesLinearized Equations of Motion PDFVíctor FerNo ratings yet
- Rotacion de ConicasDocument3 pagesRotacion de ConicasAlbertoAlcaláNo ratings yet
- Ice Amice SyllabusDocument57 pagesIce Amice SyllabusBIJAY KRISHNA DAS100% (1)
- Dynamic Modeling of Fixed-Wing UAVs (12.05.2006)Document12 pagesDynamic Modeling of Fixed-Wing UAVs (12.05.2006)Максим АнтіповNo ratings yet
- Introduction To Econometrics - Stock & Watson - CH 10 SlidesDocument99 pagesIntroduction To Econometrics - Stock & Watson - CH 10 SlidesAntonio AlvinoNo ratings yet
- Quantum Mechanics Summary of Key RelationsDocument6 pagesQuantum Mechanics Summary of Key RelationsDe Nicolas JaidarNo ratings yet
- Ped CB208 W3Document18 pagesPed CB208 W3Siddhant SoymonNo ratings yet
- Introduction To Econometrics - Stock & Watson - CH 5 SlidesDocument71 pagesIntroduction To Econometrics - Stock & Watson - CH 5 SlidesAntonio Alvino100% (2)
- 3e - Implementation - Linear StaticsDocument20 pages3e - Implementation - Linear Staticscharlottekiel12No ratings yet
- RMan - KinematicsDocument46 pagesRMan - KinematicsTao BredaNo ratings yet
- BMEN383 AxialLoad updatedClassNotes 2024 0111Document29 pagesBMEN383 AxialLoad updatedClassNotes 2024 0111Iremide AinaNo ratings yet
- 3.1 Width CalculationDocument7 pages3.1 Width CalculationSarath TejaNo ratings yet
- MCR3U Trigonometric Ratios Lesson 1 Angles and RatiosDocument23 pagesMCR3U Trigonometric Ratios Lesson 1 Angles and RatiosAat JuhatiNo ratings yet
- Parabolic Shapes and Their EquationsDocument9 pagesParabolic Shapes and Their EquationsMohd Sofian MustaffaNo ratings yet
- Exam 1 2013Document6 pagesExam 1 2013waratore1No ratings yet
- Qoqi 3 PDFDocument59 pagesQoqi 3 PDFlolopopo28No ratings yet
- S&S - Week 9Document29 pagesS&S - Week 9machasong98No ratings yet
- Subatomic Physics: Nuclear Physics Part: Profe. Carolina PinillaDocument24 pagesSubatomic Physics: Nuclear Physics Part: Profe. Carolina PinillaFrancisco Javier Rodriguez LanzaNo ratings yet
- 3D Analytical GeometryDocument3 pages3D Analytical GeometryMaths Home Work 123100% (1)
- (1.1) Physics CheatsheetDocument31 pages(1.1) Physics CheatsheetporterNo ratings yet
- Discount Factor, Beta, Mean-Variance Frontier: - The Following Topics Will Be CoveredDocument27 pagesDiscount Factor, Beta, Mean-Variance Frontier: - The Following Topics Will Be CoveredDevin MaaNo ratings yet
- Week12.1-Dimensional Analysis, Part II - Common Parameters-1Document13 pagesWeek12.1-Dimensional Analysis, Part II - Common Parameters-1Muhammad imranNo ratings yet
- Edexcel As Physics Syllabus 2001 General Items Module - Phy 1Document6 pagesEdexcel As Physics Syllabus 2001 General Items Module - Phy 1Sam LankaNo ratings yet
- ECO 401 Econometrics: SI 2021 Week 4, 28 SeptemberDocument41 pagesECO 401 Econometrics: SI 2021 Week 4, 28 SeptemberJerry maNo ratings yet
- Some Basics of Mechanics (Mostly 1 D) : Andy Ruina, Cornell TAM (&MAE)Document12 pagesSome Basics of Mechanics (Mostly 1 D) : Andy Ruina, Cornell TAM (&MAE)pranav35patilNo ratings yet
- DFT With Plane Waves, PseudopotentialsDocument22 pagesDFT With Plane Waves, PseudopotentialsIsmael Antonio González RamirezNo ratings yet
- STPM Trial 2012 Marking Scheme For Mathematics M1 Provides Solutions and ExplanationsDocument4 pagesSTPM Trial 2012 Marking Scheme For Mathematics M1 Provides Solutions and ExplanationsShu NeeNo ratings yet
- Differential Continuity Equation: Eynolds Ransport HeoremDocument5 pagesDifferential Continuity Equation: Eynolds Ransport HeoremNicholas MutuaNo ratings yet
- Aircraft Flight Dynamics: at The End of The Course, You Should Be Able ToDocument23 pagesAircraft Flight Dynamics: at The End of The Course, You Should Be Able ToAntony BalabanNo ratings yet
- 2 - Orthogonal Functions and Fourier SeriesDocument10 pages2 - Orthogonal Functions and Fourier Seriesneilsani2002No ratings yet
- 2nd Semester Engg. Mech. & SOMDocument1 page2nd Semester Engg. Mech. & SOMMukesh KumarNo ratings yet
- AttributesDocument18 pagesAttributesssa_joeNo ratings yet
- Eth 7387 01Document21 pagesEth 7387 01Gopesh KrishnaNo ratings yet
- State EstimationDocument23 pagesState EstimationMohit SinghNo ratings yet
- Flight Dynamics 04Document75 pagesFlight Dynamics 04Sadewo YaktiNo ratings yet
- Gases: Short Range, Important at Longer Range, Important atDocument10 pagesGases: Short Range, Important at Longer Range, Important atSaad AnisNo ratings yet
- L09 DFT FFTDocument23 pagesL09 DFT FFTtirumareddybhavyaNo ratings yet
- Lecture 02Document11 pagesLecture 02CNAltNo ratings yet
- Lecture#11. Goldfarb Criterion: Author: Goldfarb L.SDocument9 pagesLecture#11. Goldfarb Criterion: Author: Goldfarb L.SSanzhar OrazbayevNo ratings yet
- Experimental Verification of Kinematic Model of Scorbot Er-4U Robot ManipulatorDocument12 pagesExperimental Verification of Kinematic Model of Scorbot Er-4U Robot ManipulatorTJPRC PublicationsNo ratings yet
- TRANSMISSIONDocument38 pagesTRANSMISSIONdeamicissNo ratings yet
- Mae 331 Lecture 1Document13 pagesMae 331 Lecture 1Vasantha KumarNo ratings yet
- Faiz Ul HassanDocument5 pagesFaiz Ul HassanFaiz Ul HassanNo ratings yet
- Lecture 26: Really, Really Hard Problems: P Versus NP Today's AgendaDocument8 pagesLecture 26: Really, Really Hard Problems: P Versus NP Today's AgendaTawsifNo ratings yet
- ICECC 2021 rulebook revisionsDocument2 pagesICECC 2021 rulebook revisionsrais ryacuduNo ratings yet
- Additional Information of Rules Book ICECC 2021Document1 pageAdditional Information of Rules Book ICECC 2021rais ryacuduNo ratings yet
- Review Questions: Aircraft Equations of Motion: Translation and RotationDocument24 pagesReview Questions: Aircraft Equations of Motion: Translation and Rotationrais ryacuduNo ratings yet
- 227.057.431 216.069.704 2.345.928 218.415.632 8.641.799 Sub Total InventarisDocument1 page227.057.431 216.069.704 2.345.928 218.415.632 8.641.799 Sub Total Inventarisrais ryacuduNo ratings yet
- Oxford Reading Tree: The Pet ShopDocument12 pagesOxford Reading Tree: The Pet ShopKanjaNo ratings yet
- Tables and Bar ChartsDocument7 pagesTables and Bar ChartsVictoria FedoseevaNo ratings yet
- Learn More: National Weather ServiceDocument2 pagesLearn More: National Weather Servicedamien boyerNo ratings yet
- Gem EscortingDocument7 pagesGem Escortingsuman sutharNo ratings yet
- Adding True Bypass To A Vintage Big MuffDocument8 pagesAdding True Bypass To A Vintage Big MuffOliver SuttonNo ratings yet
- Basics of Scientific Writing, Scientific Research, and Elementary Data AnalysisDocument12 pagesBasics of Scientific Writing, Scientific Research, and Elementary Data Analysisburhan sabirNo ratings yet
- Experiment# 3 Projectile Motion (Tasks 3 and 4)Document18 pagesExperiment# 3 Projectile Motion (Tasks 3 and 4)Hafiz MuhammadNo ratings yet
- Mechatronics Test Questions Set - 1Document13 pagesMechatronics Test Questions Set - 1ChippyVijayanNo ratings yet
- Pak AgingDocument34 pagesPak AgingDavid LopezNo ratings yet
- Iot PresentationDocument9 pagesIot PresentationAbdul Majid ShaikhNo ratings yet
- CHS-WWW - Polsteel. TUBOS METALICOS PDFDocument3 pagesCHS-WWW - Polsteel. TUBOS METALICOS PDFEduardo TorreNo ratings yet
- Circuit Diagram:: Experiment No: 3 Title: Characteristics of Filament Lamp ObjectivesDocument2 pagesCircuit Diagram:: Experiment No: 3 Title: Characteristics of Filament Lamp ObjectivesAsrar Hussain BhatNo ratings yet
- Hearing Aid InformationDocument22 pagesHearing Aid InformationDeepakRodeyNo ratings yet
- VSD Power Supply Connections and EarthingDocument4 pagesVSD Power Supply Connections and EarthingHumaid ShaikhNo ratings yet
- Fire and Blast in The Future OffshoreDocument45 pagesFire and Blast in The Future OffshoredrgNo ratings yet
- Science 8-02.02 - Sensitivity in Living OrganismsDocument9 pagesScience 8-02.02 - Sensitivity in Living OrganismsAnoushia AhmerNo ratings yet
- Hero LetterDocument3 pagesHero LetterArunachalam Muthiah0% (1)
- Radiological Investigations: UltrasonographyDocument42 pagesRadiological Investigations: UltrasonographyDeeptanu GhoshNo ratings yet
- General ALT Model For Step Stress TestDocument12 pagesGeneral ALT Model For Step Stress TestAnshul NautiyalNo ratings yet
- SFM Issue Repor 15-4-2023Document3 pagesSFM Issue Repor 15-4-2023Esdras Fransua CisnerosNo ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
- Seminar Application of Nitrous Oxide in AutomobilesDocument20 pagesSeminar Application of Nitrous Oxide in AutomobilesSaikat BadyakarNo ratings yet
- Preferred Drug ListDocument2 pagesPreferred Drug ListRamNo ratings yet
- IP Modulator User's Guide - Oct - 09Document68 pagesIP Modulator User's Guide - Oct - 09reivajjwNo ratings yet
- B Ed 3 Sem Physics Teaching Group C Science 1 Paper 1 Summer 2018Document3 pagesB Ed 3 Sem Physics Teaching Group C Science 1 Paper 1 Summer 2018Rrr KkkNo ratings yet
- FLIR Blackfly Users ManualDocument53 pagesFLIR Blackfly Users ManualPavan Kumar BittuNo ratings yet
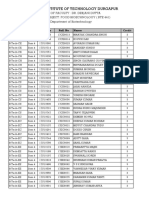
- List of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFDocument26 pagesList of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFArpan JaiswalNo ratings yet
- Acute Severe Asthma Hospital ManagementDocument1 pageAcute Severe Asthma Hospital ManagementItharshan IndreswaranNo ratings yet
- Image Forgery DetectionDocument17 pagesImage Forgery DetectionanlemacoNo ratings yet