You might also like
- Control Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBONo ratings yet
- Control Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBONo ratings yet
- Stax SR007 SZ31576Document1 pageStax SR007 SZ31576jakethejakeNo ratings yet
- 2021 TA Notes Experiment#3Document3 pages2021 TA Notes Experiment#3ahnafbaigNo ratings yet
- Figure Tp1sal - CopieDocument4 pagesFigure Tp1sal - CopieAudrey YagueNo ratings yet
- Stax Lambda Nova SignatureDocument1 pageStax Lambda Nova Signature7qzytrxdrhNo ratings yet
- Introduction To Scilab and Black-Nichols ChartsDocument7 pagesIntroduction To Scilab and Black-Nichols ChartsIndra WahyudinNo ratings yet
- Chapter6solutions PDFDocument34 pagesChapter6solutions PDFBeauponte Pouky MezonlinNo ratings yet
- BodeDocument1 pageBoderina sita dewiNo ratings yet
- Time Series Analysis Matlab Tutorial: Joachim GrossDocument39 pagesTime Series Analysis Matlab Tutorial: Joachim Grossعمار طعمةNo ratings yet
- Analysis of The System (Kelompok 2)Document8 pagesAnalysis of The System (Kelompok 2)dwi safitriNo ratings yet
- LCS21 - 31 - Bode DiagramsDocument28 pagesLCS21 - 31 - Bode Diagramsgosek16375No ratings yet
- Simulink IntroDocument16 pagesSimulink IntrohaashillNo ratings yet
- Compensation MethodsDocument37 pagesCompensation MethodsEmaxxSeverusNo ratings yet
- TIPL4705 - DAC Output ResponseDocument23 pagesTIPL4705 - DAC Output ResponseAgustin MontagniNo ratings yet
- t400s16 400ST/R160Document2 pagest400s16 400ST/R160Sunu PradanaNo ratings yet
- Lab4 ST2Document3 pagesLab4 ST2IonutNo ratings yet
- Window FunctionDocument3 pagesWindow FunctionDeepak AdhiNo ratings yet
- Multiratedigitalsignalprocessingkiruba 150719071925 Lva1 App6891 PDFDocument13 pagesMultiratedigitalsignalprocessingkiruba 150719071925 Lva1 App6891 PDFDEVENDRAPRATAP1988No ratings yet
- Frecuencia Magnitud Fase: 50 From: Sine Wave1 To: Transfer Fcn1Document1 pageFrecuencia Magnitud Fase: 50 From: Sine Wave1 To: Transfer Fcn1Ulises Javier Melgarejo GuizarNo ratings yet
- MatlabDocument1 pageMatlabsuper_lativoNo ratings yet
- Air Ultrasonic Ceramic Transducers: 400EP18A DimensionsDocument1 pageAir Ultrasonic Ceramic Transducers: 400EP18A DimensionsCharlie LeemaNo ratings yet
- Data Sheet Antenas RFSDocument9 pagesData Sheet Antenas RFSangel cesarNo ratings yet
- Lecture 6&7Document23 pagesLecture 6&7onuraktas1923No ratings yet
- Bode Plot PDFDocument41 pagesBode Plot PDFdolaNo ratings yet
- Chapter (2) "Amplitude Modulation": ContDocument13 pagesChapter (2) "Amplitude Modulation": ContMohamed SaeeDNo ratings yet
- Isolation Frequency Response: Headphone Measurements: MR Speakers Ether FlowDocument1 pageIsolation Frequency Response: Headphone Measurements: MR Speakers Ether FlowjakethejakeNo ratings yet
- EvansDocument89 pagesEvansAlexandros GiNo ratings yet
- Air Distribution 101 Titus 1 PDFDocument324 pagesAir Distribution 101 Titus 1 PDFMohamed Aboobucker Mohamed IrfanNo ratings yet
- Aziz Martakoush B00447568 Q1: Bode Diagram GM 14.1 DB (At 6.46 Rad/sec), PM 60.1 Deg (At 2.28 Rad/sec)Document6 pagesAziz Martakoush B00447568 Q1: Bode Diagram GM 14.1 DB (At 6.46 Rad/sec), PM 60.1 Deg (At 2.28 Rad/sec)sachya80No ratings yet
- ELE302 - PreLab 3Document21 pagesELE302 - PreLab 3hughjass39.99No ratings yet
- DSP Lab 9Document2 pagesDSP Lab 9SaRosh RaeesNo ratings yet
- Isolation Frequency Response: Headphone Measurements: AKG K501Document1 pageIsolation Frequency Response: Headphone Measurements: AKG K501jakethejakeNo ratings yet
- Lecture 20Document37 pagesLecture 20eng fourmNo ratings yet
- HW4 Solutions: Problem 6.2Document8 pagesHW4 Solutions: Problem 6.2Souleymane CoulibalyNo ratings yet
- Weibull Continuous Distribution 59Document9 pagesWeibull Continuous Distribution 59Lê HoàngNo ratings yet
- Experiment No:4 DFT Implementation: AIM: To Find N Point DFT of A Given SequenceDocument34 pagesExperiment No:4 DFT Implementation: AIM: To Find N Point DFT of A Given SequenceBijo J FrancisNo ratings yet
- Chapter (2) "Amplitude Modulation": ContDocument16 pagesChapter (2) "Amplitude Modulation": ContMohamed SaeeDNo ratings yet
- Sennheiser HD 202Document1 pageSennheiser HD 202kristoceaNo ratings yet
- CodingDocument10 pagesCodingUbaid ullahNo ratings yet
- Isolation Frequency Response: Headphone Measurements: Massdrop HD 6XXDocument1 pageIsolation Frequency Response: Headphone Measurements: Massdrop HD 6XXAlex Krockas Botamas ChonnaNo ratings yet
- Spectrum Estimation: Presentation by Dr. K.Muthumeenakshi Asso - Prof / ECE SSN College of EngineeringDocument51 pagesSpectrum Estimation: Presentation by Dr. K.Muthumeenakshi Asso - Prof / ECE SSN College of EngineeringdollyNo ratings yet
- Lecture 23Document40 pagesLecture 23eng fourmNo ratings yet
- Engineering Dynamics: Solutions To Chapter 2Document63 pagesEngineering Dynamics: Solutions To Chapter 2Karim TouqanNo ratings yet
- Practica de Bode: en Phi La Grafica Es - 90 (No Se Nota)Document5 pagesPractica de Bode: en Phi La Grafica Es - 90 (No Se Nota)KevinJeronimoNo ratings yet
- Computer Assignment No 04: Matlab/Pspice SimulationDocument35 pagesComputer Assignment No 04: Matlab/Pspice SimulationAhmad RaheelNo ratings yet
- PHA & ABC Combo C1 AWP 400BDocument1 pagePHA & ABC Combo C1 AWP 400Bariffin hanifNo ratings yet
- Lognormal Continuous Distribution 49Document10 pagesLognormal Continuous Distribution 49Lê HoàngNo ratings yet
- Chapter 11 Part IDocument39 pagesChapter 11 Part Imstan11No ratings yet
- A Dualband Circularly Polarized Rectangular Dielectric Resonator Antenna With L-Shaped Slots On The GroundDocument3 pagesA Dualband Circularly Polarized Rectangular Dielectric Resonator Antenna With L-Shaped Slots On The GroundArun KumarNo ratings yet
- Control Systems 2: Lecture 7 - Quantitative Feedback Theory (QFT) TrackingDocument20 pagesControl Systems 2: Lecture 7 - Quantitative Feedback Theory (QFT) TrackingLEBONo ratings yet
- Exp7,7 1,6Document3 pagesExp7,7 1,6datta_godbole830No ratings yet
- High Power Communications Transducer: Teledyne RESON PLD16830-1BDocument3 pagesHigh Power Communications Transducer: Teledyne RESON PLD16830-1BAntony Jacob AshishNo ratings yet
- Multi Stage Power Amplifier Reference Design Guide For Military CommunicationsDocument5 pagesMulti Stage Power Amplifier Reference Design Guide For Military CommunicationsSri DattaNo ratings yet
- Walmart Three Dollar BudsDocument1 pageWalmart Three Dollar BudsjakethejakeNo ratings yet
- Fiche Spec T50 - GBDocument2 pagesFiche Spec T50 - GBClientes comhospitechNo ratings yet
- 9 El-Khazali Lead Controller DesignDocument39 pages9 El-Khazali Lead Controller Designs.a.s1d3233No ratings yet
- Control System Analysis & Design by Frequency ResponseDocument38 pagesControl System Analysis & Design by Frequency ResponseDozdiNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- University of Kwazulu-Natal Electrical, Electronic and Computer Engineering Ene4Cs - Control Systems 2Document3 pagesUniversity of Kwazulu-Natal Electrical, Electronic and Computer Engineering Ene4Cs - Control Systems 2LEBONo ratings yet
- Spee Rene 1984Document86 pagesSpee Rene 1984LEBONo ratings yet
- Energies: Analysis and Mitigation of Stray Capacitance E in Resistive High-Voltage DividersDocument16 pagesEnergies: Analysis and Mitigation of Stray Capacitance E in Resistive High-Voltage DividersLEBONo ratings yet
- Information For ITEES Editorial Board MembersDocument4 pagesInformation For ITEES Editorial Board MembersLEBONo ratings yet
- Control Systems 2: Lecture 2 - Systems Identification (Parametric Methods)Document7 pagesControl Systems 2: Lecture 2 - Systems Identification (Parametric Methods)LEBONo ratings yet
- Control Systems 2: Lecture 4 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 4 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBONo ratings yet
- Energies: Analysis and Mitigation of Stray Capacitance E in Resistive High-Voltage DividersDocument16 pagesEnergies: Analysis and Mitigation of Stray Capacitance E in Resistive High-Voltage DividersLEBONo ratings yet
- Eps RP ReprintDocument26 pagesEps RP ReprintLEBONo ratings yet
- Impulse Wave PspiceDocument6 pagesImpulse Wave Pspicebrao89No ratings yet
- Spee Rene 1984Document86 pagesSpee Rene 1984LEBONo ratings yet
- Interaction of Charged Particles With Matter: Venika GanjirDocument22 pagesInteraction of Charged Particles With Matter: Venika GanjirvenikaNo ratings yet
- Topic 6 Plumbing & Sanitary (2012) Stud-1Document30 pagesTopic 6 Plumbing & Sanitary (2012) Stud-1LuisLoNo ratings yet
- Wind TurbinesDocument175 pagesWind TurbinesTrexNo ratings yet
- Welding Consumables For Lean Duplex Stainless SteelDocument2 pagesWelding Consumables For Lean Duplex Stainless SteelMohamed FaragNo ratings yet
- Business Paradigms Discovering The Future PDFDocument20 pagesBusiness Paradigms Discovering The Future PDFAndray Jamil Almakhadmeh100% (1)
- Thermal Radiation30Document1 pageThermal Radiation30Nirmal SubudhiNo ratings yet
- Results and DiscussionDocument2 pagesResults and DiscussionazuldraconNo ratings yet
- Knowledge Organiser Module 2.227543735Document3 pagesKnowledge Organiser Module 2.227543735armaanb617No ratings yet
- TFlash OverviewDocument12 pagesTFlash OverviewDanialMdNoor0% (1)
- CONNECTIONDESIGNMANUALDocument34 pagesCONNECTIONDESIGNMANUALanon_97209652No ratings yet
- 2004 An Insight Into The New Austrian TunnellDocument14 pages2004 An Insight Into The New Austrian TunnellafuhcivNo ratings yet
- Bivariate Data ProjectDocument5 pagesBivariate Data ProjectTrang VuNo ratings yet
- Extending Our Assessments: Homework and TestingDocument22 pagesExtending Our Assessments: Homework and TestingRyan HoganNo ratings yet
- Experiment 7Document2 pagesExperiment 7Zariq NazaruddinNo ratings yet
- Cat+Bearings PHEJ0032Document2 pagesCat+Bearings PHEJ0032Amjad ShahNo ratings yet
- Condenser & Heater PerformanceDocument116 pagesCondenser & Heater PerformanceGaurav Singh100% (2)
- PMR Questions.: Mathematics: Directed NumbersDocument4 pagesPMR Questions.: Mathematics: Directed NumbersTham SuperNo ratings yet
- WPS Updated PDFDocument2 pagesWPS Updated PDFRaja Muaz Ahmad KhanNo ratings yet
- Lysotracker and Lysosensor ProbesDocument4 pagesLysotracker and Lysosensor Probesplastioid4079No ratings yet
- Specification For Polymer Pin InsulatorDocument9 pagesSpecification For Polymer Pin InsulatorBinay PaudyalNo ratings yet
- Fyp-Multi Storey Residential BuildingDocument131 pagesFyp-Multi Storey Residential BuildingShubham GoyalNo ratings yet
- CE211F-18 FW#2 Angular Measurement by Tape - 2CE-3Document8 pagesCE211F-18 FW#2 Angular Measurement by Tape - 2CE-3Bea BachillerNo ratings yet
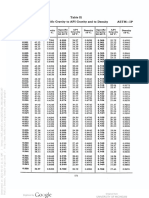
- API Astm IP: Specific Gravity Gravity Density API APIDocument1 pageAPI Astm IP: Specific Gravity Gravity Density API APIمحمد مNo ratings yet
- E 1893 - 15Document27 pagesE 1893 - 15Eric GozzerNo ratings yet
- Thermoplastic 3D Printing - An Additive Manufacturing Method For Producing Dense CeramicsDocument6 pagesThermoplastic 3D Printing - An Additive Manufacturing Method For Producing Dense Ceramicsmzaq1No ratings yet
- Speed Control of Three Phase Induction MotorDocument48 pagesSpeed Control of Three Phase Induction MotorChancy Dash100% (3)
- Physics Formula Grade 11 CbseDocument16 pagesPhysics Formula Grade 11 CbsePRANAVNo ratings yet
- Fault Diagnosis of Spacecraft Reaction Wheels Based On Principal Component AnalysisDocument6 pagesFault Diagnosis of Spacecraft Reaction Wheels Based On Principal Component AnalysisOthman NasriNo ratings yet
- Huang 2018Document22 pagesHuang 2018Bendol GalihNo ratings yet