You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 1Document1 page1Sumbal KeranNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Create Your App On Google Play In 9 StepsDocument2 pagesCreate Your App On Google Play In 9 StepsSumbal Keran100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Publish Your Free Android App To Google Play - Explanation: People Also AskDocument4 pagesPublish Your Free Android App To Google Play - Explanation: People Also AskSumbal KeranNo ratings yet
- Education Policy 1959Document2 pagesEducation Policy 1959Fahad Raza85% (20)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Government of Pakistan application formDocument1 pageGovernment of Pakistan application formIshfaque AhmedNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Education in Pakistan Problems Issues and Trends PDFDocument7 pagesEducation in Pakistan Problems Issues and Trends PDFSumbal KeranNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- SME 632 Education in Pakistan Problems Issues and TrendsDocument2 pagesSME 632 Education in Pakistan Problems Issues and TrendsSumbal Keran100% (6)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- VDocument3 pagesVSumbal KeranNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- New XLSX WorksheetDocument2 pagesNew XLSX WorksheetSumbal KeranNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- General Instructions For Students Attempting Open Book Examination PaperDocument2 pagesGeneral Instructions For Students Attempting Open Book Examination PaperSumbal KeranNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- ENGL 2023 (H40) - American Literature II - 3 Credit Hours Official Course Syllabus - Spring 2019Document7 pagesENGL 2023 (H40) - American Literature II - 3 Credit Hours Official Course Syllabus - Spring 2019Sumbal KeranNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Registration Form Grade 5 Examination 2017-18 (Boys and Girls)Document2 pagesRegistration Form Grade 5 Examination 2017-18 (Boys and Girls)Sumbal KeranNo ratings yet
- Engineering Economics - ECO202Document1 pageEngineering Economics - ECO202imransunny5No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- PaperDocument4 pagesPaperSumbal KeranNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Pakistan Education Problems, Trends and IssuesDocument7 pagesPakistan Education Problems, Trends and IssuesSumbal Keran60% (5)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Application Form PWD Central CadreDocument4 pagesApplication Form PWD Central CadreShakil Khan100% (1)
- Foundations of Education Final Exam QuestionsDocument1 pageFoundations of Education Final Exam QuestionsSumbal Keran50% (2)
- HTTP WWW - Suit.edu - PK Uploads Past Papers Project Management - MGT410Document1 pageHTTP WWW - Suit.edu - PK Uploads Past Papers Project Management - MGT410Sumbal KeranNo ratings yet
- November 2, 2006: - Bookkeeping - Presentations - Lecture "Economics of Product Development"Document60 pagesNovember 2, 2006: - Bookkeeping - Presentations - Lecture "Economics of Product Development"khurram08No ratings yet
- Date Sheet of Spring 2019 - ProgramwiseDocument98 pagesDate Sheet of Spring 2019 - ProgramwiseSumbal KeranNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Dynamic Analysis of G+20 Building in Zones 2 and 5 Using ETABSDocument1 pageDynamic Analysis of G+20 Building in Zones 2 and 5 Using ETABSSumbal KeranNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Pakistan Water and Power Development Authority: Career OpportunityDocument2 pagesPakistan Water and Power Development Authority: Career OpportunitySumbal KeranNo ratings yet
- HTTP WWW - Suit.edu - PK Uploads Past Papers Project Management - MGT410 (B)Document1 pageHTTP WWW - Suit.edu - PK Uploads Past Papers Project Management - MGT410 (B)Sumbal KeranNo ratings yet
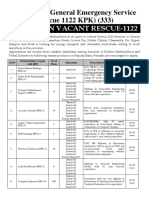
- Situation Vacant Rescue-1122: Directorate General Emergency Service (Rescue 1122 KPK)Document4 pagesSituation Vacant Rescue-1122: Directorate General Emergency Service (Rescue 1122 KPK)Yasir KhanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
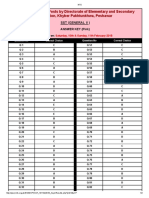
- District Cadre SST Posts by Directorate of Elementary and Secondary Education, Khyber Pakhtunkhwa, PeshawarDocument2 pagesDistrict Cadre SST Posts by Directorate of Elementary and Secondary Education, Khyber Pakhtunkhwa, PeshawarSumbal KeranNo ratings yet
- Analysis and Design of High Rise Building FramesDocument1 pageAnalysis and Design of High Rise Building FramesSumbal KeranNo ratings yet
- Mechanical Behavior of Grouted SandsDocument129 pagesMechanical Behavior of Grouted SandsSumbal KeranNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- OtsDocument3 pagesOtsSumbal KeranNo ratings yet
- Malakand MaleDocument7 pagesMalakand MaleIslamBachaMkdNo ratings yet
- Project Doc1234Document60 pagesProject Doc1234Eric AndersonNo ratings yet
- Rls Lms Noise Matlab AlgorithmsDocument5 pagesRls Lms Noise Matlab Algorithmsaar9999No ratings yet
- Modeling and Simulation of Wind Solar Hybrid System Using Matlab/SimulinkDocument8 pagesModeling and Simulation of Wind Solar Hybrid System Using Matlab/SimulinkДмитрий НекийNo ratings yet
- IEEE PAPER FXLMS OptDocument6 pagesIEEE PAPER FXLMS Optedwinsuarez1404No ratings yet
- Signal Processing VTU Syllabus For Quick RevisionDocument44 pagesSignal Processing VTU Syllabus For Quick RevisionPavan KulkarniNo ratings yet
- AP7101-Advanced Digital Signal ProcessingDocument8 pagesAP7101-Advanced Digital Signal ProcessingDhamodharan Srinivasan50% (2)
- Adaptive FilteringDocument410 pagesAdaptive FilteringLino García MoralesNo ratings yet
- Split Wiener Filtering With Application in Adaptive SystemsDocument9 pagesSplit Wiener Filtering With Application in Adaptive SystemsAYUSH KUMAR CHOWDHURYNo ratings yet
- Unit 2 Wearable SystemsDocument54 pagesUnit 2 Wearable SystemsSwarubini PJ100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Abhijit Thesis Good PDFDocument84 pagesAbhijit Thesis Good PDFSandeep NNo ratings yet
- Adaptive Filters ExplainedDocument26 pagesAdaptive Filters ExplainedRajnish Kumar0% (1)
- Reconfigurable Filter Design For Multiband Noise CancellationDocument4 pagesReconfigurable Filter Design For Multiband Noise CancellationRimsha MaryamNo ratings yet
- Thesis On FPGADocument79 pagesThesis On FPGAAshish BabuNo ratings yet
- Noise Cancellation Using Adaptive FilteringDocument6 pagesNoise Cancellation Using Adaptive FilteringHafizNo ratings yet
- Adaptive Blind Noise Suppression for Speech Processing ApplicationsDocument2 pagesAdaptive Blind Noise Suppression for Speech Processing ApplicationsErKhanTabrezNo ratings yet
- EE290C - Spring 2011 CTLE Adaptation Block DiagramDocument3 pagesEE290C - Spring 2011 CTLE Adaptation Block DiagramFahmida Pervin BrishtyNo ratings yet
- Adaptive FilterDocument3 pagesAdaptive FilterAjith Kumar RsNo ratings yet
- Part - Iii Adaptive Filters: DFD - MCQ Question BankDocument4 pagesPart - Iii Adaptive Filters: DFD - MCQ Question BankAshirbad Nayak100% (2)
- Chapter 6 Adaptive FiltersDocument59 pagesChapter 6 Adaptive FilterstadeleNo ratings yet
- MTech Syllabus ANU ECE CESP SyllabusDocument36 pagesMTech Syllabus ANU ECE CESP SyllabusKrishna Chaitanya TNo ratings yet
- VTU EC 6TH SEM SyllabusDocument35 pagesVTU EC 6TH SEM Syllabuskeerthans_1No ratings yet
- ASP Question BankDocument10 pagesASP Question BankpriyaNo ratings yet
- Adaptive FiltersDocument167 pagesAdaptive FiltersArunmozhliNo ratings yet
- Adaptive Filter Application in Echo Cancellation System and Implementation Using FPGADocument13 pagesAdaptive Filter Application in Echo Cancellation System and Implementation Using FPGAZeyad Tareq Al SaroriNo ratings yet
- Noise Reduction Using Adaptive Filter: DeclarationDocument48 pagesNoise Reduction Using Adaptive Filter: Declarationwako safayiNo ratings yet
- MATLAB Simulation Analysis For Removing Artifacts From EEG Signals Using Adaptive AlgorithmsDocument10 pagesMATLAB Simulation Analysis For Removing Artifacts From EEG Signals Using Adaptive AlgorithmsjananiNo ratings yet
- Introduction To Adaptive Filtering: Block Diagram That Defines The Inputs and Output of A Generic RLS Adaptive FilterDocument2 pagesIntroduction To Adaptive Filtering: Block Diagram That Defines The Inputs and Output of A Generic RLS Adaptive FilterRahul YadavNo ratings yet
- Adaptive Filtering Using MATLABDocument6 pagesAdaptive Filtering Using MATLABHafizNo ratings yet
- Thesis Quarter Car ModelDocument138 pagesThesis Quarter Car Modelmme58105100% (2)
- Comparative Analysis of Various Filtering Techniques For Denoising EEG SignalsDocument4 pagesComparative Analysis of Various Filtering Techniques For Denoising EEG Signalshani1986yeNo ratings yet
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)