You might also like
- Yanmar Datasheet 4LHA DTPDocument2 pagesYanmar Datasheet 4LHA DTPMihai-Eugen PopaNo ratings yet
- Give You Extraordinary Visual Enjoyment: HD Video, Glasses, MonitorsDocument24 pagesGive You Extraordinary Visual Enjoyment: HD Video, Glasses, MonitorsDenis Finnegan60% (5)
- Part List Daikin 09 - 01 PDFDocument52 pagesPart List Daikin 09 - 01 PDFHan NguyenNo ratings yet
- Beltone Ally User Guide BteDocument35 pagesBeltone Ally User Guide BteklaudyuxxxNo ratings yet
- Rescue and Smart Assistant User GuideDocument51 pagesRescue and Smart Assistant User GuideRusbel Estrada RamirezNo ratings yet
- Installation and Service Manual Swing Door OperatorDocument66 pagesInstallation and Service Manual Swing Door Operatorname familyNo ratings yet
- Sova Sea&Land: Video SurveillanceDocument21 pagesSova Sea&Land: Video SurveillanceZayar Hein100% (1)
- Nokia-FastMile-5G User GuideDocument59 pagesNokia-FastMile-5G User GuideHue HueNo ratings yet
- Powerite B7PT 7 Day Timer User GuideDocument2 pagesPowerite B7PT 7 Day Timer User GuideBill Halsted100% (1)
- TLKR t80 Extreme User GuideDocument14 pagesTLKR t80 Extreme User Guidehceti3111OMNo ratings yet
- Abu Dhabi Strategic Transportation Model User ManualDocument85 pagesAbu Dhabi Strategic Transportation Model User ManualBrindha SankariNo ratings yet
- Ipod Shuffle: User GuideDocument32 pagesIpod Shuffle: User GuidekennethNo ratings yet
- Aculaser Cx16 Users GuideDocument213 pagesAculaser Cx16 Users GuidesahbiNo ratings yet
- Spider Manual: Technical Analysis Software For Stock MarketDocument41 pagesSpider Manual: Technical Analysis Software For Stock Marketbhaskar2400No ratings yet
- A035 R256Document2 pagesA035 R256Naing SoeeNo ratings yet
- Unidrive Classic UD73 Profibus User Guide - 2Document47 pagesUnidrive Classic UD73 Profibus User Guide - 2popaminoNo ratings yet
- Product Manual 82560 (Revision R, 9/2018) : EG-3P ActuatorDocument38 pagesProduct Manual 82560 (Revision R, 9/2018) : EG-3P ActuatorMIGUEL PEÑUELANo ratings yet
- User Manual: How To Use It?Document5 pagesUser Manual: How To Use It?ariel marinNo ratings yet
- How To Use GDMS API User GuideDocument2 pagesHow To Use GDMS API User GuideMOhamedNo ratings yet
- Citroen C6 Console and Radio RemovalDocument9 pagesCitroen C6 Console and Radio RemovalMarta WawrzyniakNo ratings yet
- GDE TurboMatrixTDATDUsersGuide PDFDocument422 pagesGDE TurboMatrixTDATDUsersGuide PDFLucio AlanNo ratings yet
- Apx Two-Way Radios Dual Display User GuideDocument213 pagesApx Two-Way Radios Dual Display User GuideSteven PentonNo ratings yet
- Kubota KX027 4Document2 pagesKubota KX027 4Jorge Felipe Sepúlveda HaugenNo ratings yet
- User GuideDocument545 pagesUser GuidesathishveeranNo ratings yet
- Lenovo A1000 - Schematic DiagarmDocument11 pagesLenovo A1000 - Schematic DiagarmDJ Alex0% (3)
- BNSG 9000 NSG 90003g HW Userguide Rev DDocument40 pagesBNSG 9000 NSG 90003g HW Userguide Rev DJoginder SinghNo ratings yet
- Vhs To DVD 3.0 Se: HonestechDocument33 pagesVhs To DVD 3.0 Se: HonestechGiulia SpatrisanoNo ratings yet
- Vodafone b970Document29 pagesVodafone b970Zsolt PunkostiNo ratings yet
- DBMS ManualDocument48 pagesDBMS ManualUmesh GowdaNo ratings yet
- RHB-Futures-GTS-Desktop App-UserGuide PDFDocument31 pagesRHB-Futures-GTS-Desktop App-UserGuide PDFGreenScrubNo ratings yet
- Nmplot Users GuideDocument259 pagesNmplot Users Guidesigit sutokoNo ratings yet
- Hydraulic Diagram, Neutral ( To 5001) : Service InformationDocument2 pagesHydraulic Diagram, Neutral ( To 5001) : Service InformationĐoàn LựcNo ratings yet
- Blade Shims Volvo g720vhpDocument2 pagesBlade Shims Volvo g720vhpGabriel Paredes E.No ratings yet
- PLCLogix User Guide Chapter OverviewDocument27 pagesPLCLogix User Guide Chapter OverviewCldResendeNo ratings yet
- Guava EasyCyte System User's GuideDocument395 pagesGuava EasyCyte System User's GuideArmando Signore100% (1)
- Wheel Loader: Engine Power 66,0 KW / 88,5 HP at 2.350 RPM Operating Weight 6.875 - 7.180 KG Bucket Capacity 1,05 - 1,80 MDocument12 pagesWheel Loader: Engine Power 66,0 KW / 88,5 HP at 2.350 RPM Operating Weight 6.875 - 7.180 KG Bucket Capacity 1,05 - 1,80 MJimmyNo ratings yet
- TRANSYT 14 User Guide PDFDocument474 pagesTRANSYT 14 User Guide PDFBrandon CooperNo ratings yet
- 826pto Chipper Manual P.W. 10.30.2017Document21 pages826pto Chipper Manual P.W. 10.30.2017thuanNo ratings yet
- Manual de Peças Manipulador Telescopico 1200SJP 1350SJPDocument460 pagesManual de Peças Manipulador Telescopico 1200SJP 1350SJPAlessandro de OliveiraNo ratings yet
- User Manual: IndexDocument29 pagesUser Manual: IndexKrum Kashavarov100% (1)
- Adicon 2500 ProtocolDocument85 pagesAdicon 2500 ProtocolNDNUPortfolioNo ratings yet
- User's Guide 4.0.80Document616 pagesUser's Guide 4.0.80topoapocalipticoNo ratings yet
- Daikin LXE10A PDFDocument162 pagesDaikin LXE10A PDFTama MaliNo ratings yet
- Schmidt - Senior 2000 - Trailer Sweeping MachineDocument2 pagesSchmidt - Senior 2000 - Trailer Sweeping Machinekavka corner100% (2)
- U2Asa: Double Angle Sensor Unit: Electrical CharacteristicsDocument2 pagesU2Asa: Double Angle Sensor Unit: Electrical CharacteristicsEngenharia03100% (1)
- Maxima 2: Pneumatic Precision Seed DrillsDocument36 pagesMaxima 2: Pneumatic Precision Seed DrillsJános FarkasNo ratings yet
- Vdocuments - MX Setting Procedure Evs HMF Tech Procedure Evs 11 16pdf Setting ProcedureDocument37 pagesVdocuments - MX Setting Procedure Evs HMF Tech Procedure Evs 11 16pdf Setting ProcedureKrum Kashavarov100% (1)
- 1255224Document358 pages1255224Reyes VargasNo ratings yet
- SIS-OW351 - 48 - Virtual SIS User GuideDocument77 pagesSIS-OW351 - 48 - Virtual SIS User GuideRicardas KragnysNo ratings yet
- ZXDF10 Diesel Generator Set User Manual GuideDocument8 pagesZXDF10 Diesel Generator Set User Manual GuideDavid Tombe Rumi100% (1)
- FAA Helicopters - Chapter 05 - Rotorcraft Flight ManualDocument6 pagesFAA Helicopters - Chapter 05 - Rotorcraft Flight ManualFernando Torquato LeiteNo ratings yet
- Canon Color ImageCLASS MF8280Cw ADF Roller Replacement and Separation PadDocument7 pagesCanon Color ImageCLASS MF8280Cw ADF Roller Replacement and Separation PadTech Support CW HIRAMNo ratings yet
- IN-NT-PLUS-1.5 - Reference Guide PDFDocument90 pagesIN-NT-PLUS-1.5 - Reference Guide PDFDouglas SobralNo ratings yet
- Loglift 105S Charakteristikos PDFDocument16 pagesLoglift 105S Charakteristikos PDFSaulius KlimkeviciusNo ratings yet
- Man - Eng - Mov11 - 3 - Users Guide PDFDocument107 pagesMan - Eng - Mov11 - 3 - Users Guide PDFYacine AbbanNo ratings yet
- Fast BGA Rework Station with Accurate Temperature ControlDocument4 pagesFast BGA Rework Station with Accurate Temperature ControlmariabaccaroNo ratings yet
- Barudan BEAT-804, - 806, - 808, - M804, - M806, - M808-YS PDFDocument78 pagesBarudan BEAT-804, - 806, - 808, - M804, - M806, - M808-YS PDFanyelo sanchezNo ratings yet
- A3 Super: Instruction ManualDocument38 pagesA3 Super: Instruction ManualERWAN sarjitoNo ratings yet
- XTreme ManualDocument110 pagesXTreme ManualBrice DaunayNo ratings yet
- Component ListDocument2 pagesComponent ListMario Alfaro CanoNo ratings yet
- AgOpenGPS PGN Codes for Ethernet CommunicationDocument1 pageAgOpenGPS PGN Codes for Ethernet CommunicationMario Alfaro CanoNo ratings yet
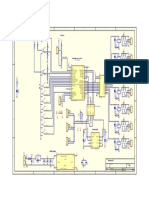
- Auto Steer SchematicDocument1 pageAuto Steer SchematicMario Alfaro CanoNo ratings yet
- Switches: Manual AutoDocument1 pageSwitches: Manual AutoMario Alfaro CanoNo ratings yet
- TDB01 R Jameco Valuepro PDFDocument1 pageTDB01 R Jameco Valuepro PDFMario Alfaro CanoNo ratings yet
- (HortScience) Impact of Ozone On Growth of Peach, Apricot, and AlmondDocument2 pages(HortScience) Impact of Ozone On Growth of Peach, Apricot, and AlmondMario Alfaro CanoNo ratings yet
- PORT 12 Et Port 15VHF IBIZA ManuelDocument51 pagesPORT 12 Et Port 15VHF IBIZA ManuelTeszt ElekNo ratings yet
- "Employee Payroll Management System": Miss - Priyanka Abhaynath YadavDocument31 pages"Employee Payroll Management System": Miss - Priyanka Abhaynath Yadavhabeb TubeNo ratings yet
- Introduction To SQL Programming TechniquesDocument24 pagesIntroduction To SQL Programming Techniquesakashdeepime100% (2)
- CPO Science Foundations of Physics: Unit 7, Chapter 24Document47 pagesCPO Science Foundations of Physics: Unit 7, Chapter 24dheerajbhagwatNo ratings yet
- Grammar of The Mondial LanguageDocument63 pagesGrammar of The Mondial LanguageMithridates100% (1)
- SAFETY GUIDELINES FOR FORMWORK AND CENTERINGDocument5 pagesSAFETY GUIDELINES FOR FORMWORK AND CENTERINGKrish VetriselvamNo ratings yet
- Lift Rope Inspection PDFDocument2 pagesLift Rope Inspection PDFcarlosorizaba100% (1)
- Presented by - Aniket Ghosh Dastidar Construction Engg. 4 Year Jadavpur UniversityDocument20 pagesPresented by - Aniket Ghosh Dastidar Construction Engg. 4 Year Jadavpur UniversitySaurabh AgrawalNo ratings yet
- Tools, Plans, and DIY Projects Index PDFDocument5 pagesTools, Plans, and DIY Projects Index PDFCivil War75% (4)
- Statement of Financial Affairs: United States Bankruptcy Court Southern District of New YorkDocument42 pagesStatement of Financial Affairs: United States Bankruptcy Court Southern District of New YorkChapter 11 DocketsNo ratings yet
- Labview ProgrammingDocument20 pagesLabview ProgrammingJames WoodNo ratings yet
- CHAPTER 8 The Rise of Instrumental Music - 141-152Document8 pagesCHAPTER 8 The Rise of Instrumental Music - 141-152Aleksandre Roderick-LorenzNo ratings yet
- VAT Training Day 3Document42 pagesVAT Training Day 3iftekharul alamNo ratings yet
- MCMC Methods For Multi-Response Generalized LinearDocument22 pagesMCMC Methods For Multi-Response Generalized LinearkyotopinheiroNo ratings yet
- A Study of Impact of FMCG Product Packaging On Consumer Behaviour With Reference To Food Items - IOPDocument37 pagesA Study of Impact of FMCG Product Packaging On Consumer Behaviour With Reference To Food Items - IOPvaibhav rajputNo ratings yet
- Full Download Test Bank For Positive Psychology 4th Edition Lopez PDF Full ChapterDocument36 pagesFull Download Test Bank For Positive Psychology 4th Edition Lopez PDF Full Chaptershaps.tortillayf3th100% (21)
- Cost Concepts, Cost Analysis, and Cost EstimationDocument2 pagesCost Concepts, Cost Analysis, and Cost EstimationGêmTürÏngånÖNo ratings yet
- CMG STARS Guide PDFDocument1,136 pagesCMG STARS Guide PDFAastha91% (11)
- PEC ReviewerDocument17 pagesPEC ReviewerJunallyn ManigbasNo ratings yet
- 2001 Bhuj EarthquakeDocument2 pages2001 Bhuj EarthquakeBhushanRajNo ratings yet
- RICEFW Explained - Customization and Changes in SAPDocument20 pagesRICEFW Explained - Customization and Changes in SAPRoshan AhireNo ratings yet
- Assessment Rubric Coach Manual Oct 11 - FinalDocument9 pagesAssessment Rubric Coach Manual Oct 11 - Finalapi-246218373No ratings yet
- BA Mckesson Interview 2Document3 pagesBA Mckesson Interview 2Vikram hostNo ratings yet
- Detecting Voltage Differences Between Two Points With A Phase ComparatorDocument1 pageDetecting Voltage Differences Between Two Points With A Phase ComparatorContract 42154No ratings yet
- Lubricated Coupling TrainingDocument47 pagesLubricated Coupling TrainingTheerayootNo ratings yet
- Circuit Breaker Analyzer & Timer CAT126D: DescriptionDocument7 pagesCircuit Breaker Analyzer & Timer CAT126D: Descriptionkenlavie2No ratings yet
- Giáo trình TACN Đồ họa 1 - 2021 - chính thứcDocument57 pagesGiáo trình TACN Đồ họa 1 - 2021 - chính thứcHeo BiểnNo ratings yet
- Periodic Table: Oakland Schools Chemistry Resource UnitDocument42 pagesPeriodic Table: Oakland Schools Chemistry Resource UnitAnum TauqirNo ratings yet
- Anna University Project Work Submission FormDocument1 pageAnna University Project Work Submission FormaddssdfaNo ratings yet
- Air Ticket Booking - Book Flight Tickets - Cheap Air Fare - LTC Fare - IRCTC AIRDocument2 pagesAir Ticket Booking - Book Flight Tickets - Cheap Air Fare - LTC Fare - IRCTC AIRMohitSharmaNo ratings yet
- Icarus & DaedalusDocument2 pagesIcarus & DaedalusIsrael AsinasNo ratings yet