You might also like
- 6WG1 TQA Workshop Manual N2223 Ex PDFDocument3 pages6WG1 TQA Workshop Manual N2223 Ex PDFmasakp75% (8)
- 5321 Elastomeric Bearing Design AASHTO For P18 & P19 ADocument10 pages5321 Elastomeric Bearing Design AASHTO For P18 & P19 AAshraf Mohamed YehiaNo ratings yet
- Module 5 Geotech Ground Improvement Version 1Document122 pagesModule 5 Geotech Ground Improvement Version 1irtaza abbasNo ratings yet
- MSS SP-70 (1998)Document13 pagesMSS SP-70 (1998)Allan SousaNo ratings yet
- K3VG-Datasheet Letter Cc19 191008 Final-NRDocument40 pagesK3VG-Datasheet Letter Cc19 191008 Final-NRcatur vallentNo ratings yet
- 4 MivDocument19 pages4 Mivpavankumar001No ratings yet
- Techniques of Vibration MeasurementDocument36 pagesTechniques of Vibration MeasurementDeep SY100% (1)
- Automated Drilling Algorithms ImplementationDocument11 pagesAutomated Drilling Algorithms ImplementationnanlingjigongNo ratings yet
- Hyundai 25 30 33L-7M PDFDocument6 pagesHyundai 25 30 33L-7M PDFAndre STANo ratings yet
- AR #79 A Heterodyne Laser Interferometer For Primary Calibration of AccelerometersDocument8 pagesAR #79 A Heterodyne Laser Interferometer For Primary Calibration of AccelerometersTim StubbsNo ratings yet
- A New Dimension of Precision: For Optimum Results in Torque MeasurementDocument12 pagesA New Dimension of Precision: For Optimum Results in Torque MeasurementpiveseNo ratings yet
- The Optimization Design of Thin Piezoelectric ForcDocument11 pagesThe Optimization Design of Thin Piezoelectric ForcNguyễn Văn ĐiệpNo ratings yet
- A Guide For Choosing The Right Calibration For Torque TransducersDocument6 pagesA Guide For Choosing The Right Calibration For Torque TransducersCCNo ratings yet
- Digital Rebound Test Hammer: 58-C0181/DGTDocument4 pagesDigital Rebound Test Hammer: 58-C0181/DGTEdwin Ramos PolicarpioNo ratings yet
- HIT Pendulum Impact TestersDocument24 pagesHIT Pendulum Impact TestersErisell CastilloNo ratings yet
- Optimized Vibration Control of Diesel-Electric Power Units in Rail VehiclesDocument4 pagesOptimized Vibration Control of Diesel-Electric Power Units in Rail VehiclesromulozgNo ratings yet
- Elkarous 2013 J. Phys. Conf. Ser. 459 012048Document13 pagesElkarous 2013 J. Phys. Conf. Ser. 459 012048silvia landinNo ratings yet
- Silver Schmidt Hammer: Product Brochure NDT EquipmentDocument3 pagesSilver Schmidt Hammer: Product Brochure NDT EquipmentDilhara WickramaarachchiNo ratings yet
- Measurement of Penetration Force Using A Hall-Current-SensorDocument5 pagesMeasurement of Penetration Force Using A Hall-Current-SensorAmin HashemiNo ratings yet
- Totis 2014Document18 pagesTotis 2014fernando.s88No ratings yet
- Torque Transducer With Check Standard Combination: ACTA IMEKO July 2017Document7 pagesTorque Transducer With Check Standard Combination: ACTA IMEKO July 2017FlaviusNo ratings yet
- Concrete Inspection & Metal DetectionDocument13 pagesConcrete Inspection & Metal DetectionSupriyo PNo ratings yet
- Teodoriu-SPC 2003 02Document9 pagesTeodoriu-SPC 2003 02Jeswin RoshiniNo ratings yet
- The Design and Performance of An Electronic Torque Standard Directly Traceable To The Revised SIDocument6 pagesThe Design and Performance of An Electronic Torque Standard Directly Traceable To The Revised SIAdileidy TorresNo ratings yet
- Competitive Advantages of BTG Rotating Consistency Transmitter Type MEK 2300 PDFDocument18 pagesCompetitive Advantages of BTG Rotating Consistency Transmitter Type MEK 2300 PDFСерый ВолкNo ratings yet
- C372MDocument2 pagesC372Mmiloud_flittiNo ratings yet
- Theory and Application of Piezoelectric AccelerometersDocument20 pagesTheory and Application of Piezoelectric AccelerometersCaio FlemingNo ratings yet
- An Automated Test and Measurement System For Calibration of Industrial FlowmetersDocument2 pagesAn Automated Test and Measurement System For Calibration of Industrial FlowmetersfredpintoNo ratings yet
- Imeko WC 2015 TC3 076Document5 pagesImeko WC 2015 TC3 076Edgar MartinezNo ratings yet
- Non Contact Vibration Measurement of RotorDocument5 pagesNon Contact Vibration Measurement of RotorslOwpOke13No ratings yet
- Day 1 Seminar, Part II Load TestingDocument90 pagesDay 1 Seminar, Part II Load TestingTan Hock ChenNo ratings yet
- Esward 2019 Metrologia 56 015002Document12 pagesEsward 2019 Metrologia 56 015002sandorNo ratings yet
- Theoretical and Experimental Investigation of Kwu'S Most Recent HP//P Steam Turbine BladeDocument9 pagesTheoretical and Experimental Investigation of Kwu'S Most Recent HP//P Steam Turbine BladedrcNo ratings yet
- Design, Assembly and Calibration of A Microcontroller-Based Geiger-M Uller Doserate MeterDocument5 pagesDesign, Assembly and Calibration of A Microcontroller-Based Geiger-M Uller Doserate MeterALL ADIN NURHUDA D4AJNo ratings yet
- Fatigue Test RigDocument6 pagesFatigue Test RigDilip PatelNo ratings yet
- Psi - KN 310565Document16 pagesPsi - KN 310565Vegakung PhoenixNo ratings yet
- Stiffness of Engine MountDocument1 pageStiffness of Engine Mountnkrish21856No ratings yet
- Design of Internal Permanent Magnet Brushless DC Motor Using AnsysDocument7 pagesDesign of Internal Permanent Magnet Brushless DC Motor Using Ansysviet anh nguyenNo ratings yet
- Medidor de Flujo Masico TricorDocument28 pagesMedidor de Flujo Masico TricorFer PabNo ratings yet
- PARoD - SPIE 2012Document8 pagesPARoD - SPIE 2012Anonymous FGzNDzIeJNo ratings yet
- Courtsey Kop-Flex Emerson Power Transmission Corp Jpc3.Pdf: DETC2000/PTG-14455Document13 pagesCourtsey Kop-Flex Emerson Power Transmission Corp Jpc3.Pdf: DETC2000/PTG-14455Raphael LemosNo ratings yet
- CIMMEC 2019 - Continuous Calibration - A.SavarinDocument6 pagesCIMMEC 2019 - Continuous Calibration - A.SavarinAlejandro SavarinNo ratings yet
- CT Analyzer Network Operators CT Testing Article OMICRON Magazine 2019 ENUDocument4 pagesCT Analyzer Network Operators CT Testing Article OMICRON Magazine 2019 ENUakhbalmNo ratings yet
- A New Development in Continuous Torque Monitoring CouplingsDocument13 pagesA New Development in Continuous Torque Monitoring CouplingsmlouredocasadoNo ratings yet
- Application of Shock Tube in Calibrating Dynamic Pressure TransducersDocument7 pagesApplication of Shock Tube in Calibrating Dynamic Pressure TransducersAndrew LiebermannNo ratings yet
- TD13 enDocument12 pagesTD13 enkiyong namNo ratings yet
- Steel Structure Analyzer NOVOTEST KRC-M2Document2 pagesSteel Structure Analyzer NOVOTEST KRC-M2Woodrow FoxNo ratings yet
- Paper-Rotating Bending Machine For High Cycle Fatigue TestingDocument7 pagesPaper-Rotating Bending Machine For High Cycle Fatigue TestingAlcidney Valério ChavesNo ratings yet
- 200 HP Tractor - Zimbru Traction Bar Testing in Dynamic Regime and Modelling With Finite Element (MEF)Document6 pages200 HP Tractor - Zimbru Traction Bar Testing in Dynamic Regime and Modelling With Finite Element (MEF)meceroNo ratings yet
- PS1 - 2 - No-Load Sound Power Levels For Specification Purposes Derived From More ThanDocument11 pagesPS1 - 2 - No-Load Sound Power Levels For Specification Purposes Derived From More Thangiovanni MarzoloNo ratings yet
- KN 650728Document38 pagesKN 650728Vegakung PhoenixNo ratings yet
- Diskrete-Cotinuum Methods Application For Rotating Machine-Absorber Interaction AnalysisDocument4 pagesDiskrete-Cotinuum Methods Application For Rotating Machine-Absorber Interaction AnalysisJeffrey StuartNo ratings yet
- Studies On Shock Waves Produced by Reddy Tube: Atria Institute of TechnologyDocument10 pagesStudies On Shock Waves Produced by Reddy Tube: Atria Institute of TechnologySai DhruvNo ratings yet
- Report of Kanhpur Abutment 2 CIPDocument27 pagesReport of Kanhpur Abutment 2 CIPShamsul IslamNo ratings yet
- TDC 6 388Document3 pagesTDC 6 388sonnu151No ratings yet
- McCoyGlobal WirelessTorqueSubDocument2 pagesMcCoyGlobal WirelessTorqueSubAndres SanchezNo ratings yet
- 2020 Multi Function Tribometer Brochure Rtec InstrumentsDocument13 pages2020 Multi Function Tribometer Brochure Rtec Instrumentscelestino biasottoNo ratings yet
- Technical Specifi Cation Energy 2015 - Harmonized Design of Overhead Contact LinesDocument15 pagesTechnical Specifi Cation Energy 2015 - Harmonized Design of Overhead Contact LinesDevendran PoobalasingamNo ratings yet
- Optimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFDocument6 pagesOptimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFrakeshee2007No ratings yet
- Product Data: Impact Hammer - Type 8202Document4 pagesProduct Data: Impact Hammer - Type 8202sadettinorhanNo ratings yet
- 2017 KlimchikDocument6 pages2017 KlimchikJulen Urrutia GarciaNo ratings yet
- Measuring The Torque of A Combustion Engine.: ICMSC 2018Document5 pagesMeasuring The Torque of A Combustion Engine.: ICMSC 2018Hanafi AjahNo ratings yet
- Application Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal AnalysisDocument8 pagesApplication Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal Analysisjhon vargasNo ratings yet
- Brochure POLISHED ROD DYNAMOMETER TRANSDUCERDocument2 pagesBrochure POLISHED ROD DYNAMOMETER TRANSDUCERMohamed ben halimaNo ratings yet
- A Guide For Choosing The Right Calibration For Torque TransducersDocument6 pagesA Guide For Choosing The Right Calibration For Torque Transducers320338No ratings yet
- High Voltage Measurement Techniques: Fundamentals, Measuring Instruments, and Measuring MethodsFrom EverandHigh Voltage Measurement Techniques: Fundamentals, Measuring Instruments, and Measuring MethodsNo ratings yet
- Vibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingFrom EverandVibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingNo ratings yet
- Establishment of Torque Realisation Up To 5 KNM WiDocument6 pagesEstablishment of Torque Realisation Up To 5 KNM WisemininNo ratings yet
- On The Stability of Measuring Devices For Torque Key ComparisonsDocument4 pagesOn The Stability of Measuring Devices For Torque Key ComparisonssemininNo ratings yet
- PagesDocument84 pagesPagessemininNo ratings yet
- Notional Architecture For Unigine SolutionDocument3 pagesNotional Architecture For Unigine SolutionsemininNo ratings yet
- Vicinity Map: Waterline, Plumbing and Storm Drainage Layout SCALE: 1:100 MTSDocument1 pageVicinity Map: Waterline, Plumbing and Storm Drainage Layout SCALE: 1:100 MTSLou PotesNo ratings yet
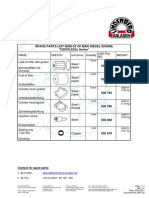
- Spare Parts List N200-03 of Man Diesel Engine "D2876LE20x Series"Document1 pageSpare Parts List N200-03 of Man Diesel Engine "D2876LE20x Series"Jezrell JaravataNo ratings yet
- Englisch HPG2BDocument12 pagesEnglisch HPG2BБиљана ЗагорчићNo ratings yet
- Integration of A Single Cylinder Engine Model and A Boost System Model For Efficient Numerical Mapping of Engine Performance and Fuel ConsumptionDocument8 pagesIntegration of A Single Cylinder Engine Model and A Boost System Model For Efficient Numerical Mapping of Engine Performance and Fuel ConsumptionNambi RajanNo ratings yet
- Boilers - ClassificationDocument77 pagesBoilers - Classificationkabbilaash kumarNo ratings yet
- Vol 28 SI 2 Paper 6Document10 pagesVol 28 SI 2 Paper 6Bima NugrohoNo ratings yet
- Iso 21013 4 2012 en PDFDocument8 pagesIso 21013 4 2012 en PDFds14me001 SvnitNo ratings yet
- Thin Slender Concrete Rectangular Walls in Moderate Seismic Regions With A Single Reinforcement Layer2020journal of Building Engineering PDFDocument12 pagesThin Slender Concrete Rectangular Walls in Moderate Seismic Regions With A Single Reinforcement Layer2020journal of Building Engineering PDFLeonardo Chavez VillamizarNo ratings yet
- Chapter 11 - PS Stability 23 07 11 NotesDocument69 pagesChapter 11 - PS Stability 23 07 11 NotesMohd A IshakNo ratings yet
- BC Brochure Redura RodSealingSystem 12S WebDocument16 pagesBC Brochure Redura RodSealingSystem 12S WebgemagdyNo ratings yet
- Som QuestionDocument5 pagesSom QuestionjayakumarNo ratings yet
- 8M Light PoleDocument3 pages8M Light PoleAnkit KhuranaNo ratings yet
- Final1 PDFDocument10 pagesFinal1 PDFAngelica SantiagoNo ratings yet
- ForensicEngineeringMay262015 LoadTestingDocument10 pagesForensicEngineeringMay262015 LoadTestingEli MatucadNo ratings yet
- Physical Ageing in Amorphous Polymers and Other MaterialsDocument249 pagesPhysical Ageing in Amorphous Polymers and Other Materialswc_11111No ratings yet
- Mind Mapping 11 PDFDocument1 pageMind Mapping 11 PDFryanNo ratings yet
- Rotary Encoders For The Elevator Industry: Product OverviewDocument6 pagesRotary Encoders For The Elevator Industry: Product OverviewSarjeet Singh DagarNo ratings yet
- Mechanical Engineering CurriculumDocument8 pagesMechanical Engineering CurriculumaoguNo ratings yet
- AQT-MSV-1: Operational ManualDocument8 pagesAQT-MSV-1: Operational ManualEdgar CastroNo ratings yet
- Analysis of Ice Formation Over An Aircraft WingDocument9 pagesAnalysis of Ice Formation Over An Aircraft WingNambi RajanNo ratings yet
- 4-3 Towing ProcedureDocument3 pages4-3 Towing ProcedureOlubi FemiNo ratings yet
- Colchester Alpha Brochure 2021Document7 pagesColchester Alpha Brochure 2021KhalilullahNo ratings yet
- 404 344405 454 Tandem Drive Axles Older May 1999Document36 pages404 344405 454 Tandem Drive Axles Older May 1999Keith McCann100% (1)