You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Isogen Symbol Key (SKEY) DefinitionsDocument92 pagesIsogen Symbol Key (SKEY) DefinitionsMehranNo ratings yet
- SM 1Document11 pagesSM 1EdgardoCadagan100% (1)
- Effect of Prosthetic Alignment Changes On Socket Reaction Moment Impulse During Walking in Transtibial AmputeesDocument19 pagesEffect of Prosthetic Alignment Changes On Socket Reaction Moment Impulse During Walking in Transtibial AmputeesNada GhammemNo ratings yet
- Humanoid Robot Lola - Research Platform For High-SpeedwalkingDocument11 pagesHumanoid Robot Lola - Research Platform For High-SpeedwalkingNada GhammemNo ratings yet
- Annals of SurgeryDocument12 pagesAnnals of SurgeryNada GhammemNo ratings yet
- Les TypeDocument95 pagesLes TypeNada GhammemNo ratings yet
- Criterion and Construct Validity of Prosthesis-IntDocument20 pagesCriterion and Construct Validity of Prosthesis-IntNada GhammemNo ratings yet
- Stress Analysis of Four-Bar Linkage Transfemoral Prosthetic in Gait CycleDocument5 pagesStress Analysis of Four-Bar Linkage Transfemoral Prosthetic in Gait CycleNada GhammemNo ratings yet
- Design and Implementation of Prosthetic Arm UsingDocument6 pagesDesign and Implementation of Prosthetic Arm UsingNada GhammemNo ratings yet
- Optimization of Six Bar Knee Linkage For Stability of Knee ProsthesisDocument9 pagesOptimization of Six Bar Knee Linkage For Stability of Knee ProsthesisNada GhammemNo ratings yet
- Kinematics Synthesis of A New Generation of RapidDocument30 pagesKinematics Synthesis of A New Generation of RapidNada GhammemNo ratings yet
- Design of A Novel Knee Prosthesis Mechanism With Good StabilityDocument7 pagesDesign of A Novel Knee Prosthesis Mechanism With Good StabilityNada GhammemNo ratings yet
- Development of A Hinge Compatible With The Kinematics of The Knee JointDocument14 pagesDevelopment of A Hinge Compatible With The Kinematics of The Knee JointNada GhammemNo ratings yet
- Knowledge-Based System For Guided Modeling of SockDocument16 pagesKnowledge-Based System For Guided Modeling of SockNada GhammemNo ratings yet
- Robo LegDocument3 pagesRobo LegNada GhammemNo ratings yet
- C-Leg Prosthetic System. Instructions For Use (Qualified Personnel)Document28 pagesC-Leg Prosthetic System. Instructions For Use (Qualified Personnel)Nada GhammemNo ratings yet
- Evolution of Artificial Limbs: Associate Professor and Hod I/C Deptt of Orthopaedics NeigrihmsDocument51 pagesEvolution of Artificial Limbs: Associate Professor and Hod I/C Deptt of Orthopaedics NeigrihmsNada GhammemNo ratings yet
- 42 - ACMSEA - Rajesh (3) GGGDocument9 pages42 - ACMSEA - Rajesh (3) GGGNada GhammemNo ratings yet
- Hybrid Actuation Systems For Lightweight Transfemoral ProsthesesDocument3 pagesHybrid Actuation Systems For Lightweight Transfemoral ProsthesesNada GhammemNo ratings yet
- A Bio-Inspired Condylar Knee Joint For Leg Amputees and For Knee ImplantsDocument13 pagesA Bio-Inspired Condylar Knee Joint For Leg Amputees and For Knee ImplantsNada GhammemNo ratings yet
- 10 5923 J Ajbe 20130305 01Document8 pages10 5923 J Ajbe 20130305 01Nada GhammemNo ratings yet
- A Method To Analyze Dynamics Properties of Transfemoral ProsthesisDocument5 pagesA Method To Analyze Dynamics Properties of Transfemoral ProsthesisNada GhammemNo ratings yet
- Optimal Design of A Transfemoral Prosthesis With Energy Storage and RegenerationDocument6 pagesOptimal Design of A Transfemoral Prosthesis With Energy Storage and RegenerationNada GhammemNo ratings yet
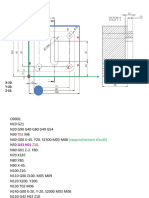
- Exercice Fraisage Partie 1Document3 pagesExercice Fraisage Partie 1Nada GhammemNo ratings yet
- Interactive Construction Interactive Fab PDFDocument8 pagesInteractive Construction Interactive Fab PDFNada GhammemNo ratings yet
- Secure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsDocument15 pagesSecure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsNada GhammemNo ratings yet
- App 05 Drill Rig SpecDocument8 pagesApp 05 Drill Rig SpecTibebu TayeNo ratings yet
- Single Disc Sample Grinder Polisher GP-1SDocument2 pagesSingle Disc Sample Grinder Polisher GP-1S周记伟No ratings yet
- Bend Angles 0.3 1-Dec. (.X) 0.3 Bend Radiuses 0.3 2-Dec. (.XX) 0.1 Unspecified 0.3 3-Dec. (.XXX) 0.05Document1 pageBend Angles 0.3 1-Dec. (.X) 0.3 Bend Radiuses 0.3 2-Dec. (.XX) 0.1 Unspecified 0.3 3-Dec. (.XXX) 0.05Quoc VinhNo ratings yet
- 10 1199367786-K Deutz FahrDocument27 pages10 1199367786-K Deutz FahrJoe2030us82100% (2)
- BPW 3Document58 pagesBPW 3ВЛАДИМИРNo ratings yet
- 5114 21 03.kitDocument3 pages5114 21 03.kitTimon2005No ratings yet
- Homelite String Trimmer Parts Manual HBC30 String Trimmer UT 15085Document12 pagesHomelite String Trimmer Parts Manual HBC30 String Trimmer UT 15085marcosNo ratings yet
- Experimentalmechanics (1) UnlockedDocument127 pagesExperimentalmechanics (1) UnlockeddivyaNo ratings yet
- 00.diesel Engine Power Plant Design PDFDocument4 pages00.diesel Engine Power Plant Design PDFmardirad100% (1)
- Guia para Expandido de TubosDocument3 pagesGuia para Expandido de Tubosjafc986No ratings yet
- 1Document39 pages1aimanzoeyNo ratings yet
- 0.1 Hire Charges of Plants & Machinery: Basic RatesDocument4 pages0.1 Hire Charges of Plants & Machinery: Basic RatesSanjan SameerNo ratings yet
- Ecoloc RingfederDocument24 pagesEcoloc Ringfedertalo222No ratings yet
- Bomag Bw216 Service TrainingDocument20 pagesBomag Bw216 Service Trainingsheila100% (46)
- +++ Off-Road Vehicle DynamicsDocument37 pages+++ Off-Road Vehicle Dynamicsnadjib62No ratings yet
- 07-Eixo Dianteiro 2Document18 pages07-Eixo Dianteiro 2Renato AssisNo ratings yet
- Hyundai H380 TrucksDocument12 pagesHyundai H380 TrucksIrfan SaeedNo ratings yet
- Aerator PremiumDocument10 pagesAerator PremiumvijaykumarnNo ratings yet
- Alignment Coupling Operation Manual Tyre-FlexDocument37 pagesAlignment Coupling Operation Manual Tyre-Flexer_sanjaypatelNo ratings yet
- Output 16 TO 1540 KW Pressure Jet Fuel Oil BurnersDocument16 pagesOutput 16 TO 1540 KW Pressure Jet Fuel Oil BurnersRawan Alwan ZarifNo ratings yet
- FEM9.756 Engl PDFDocument57 pagesFEM9.756 Engl PDFserkanNo ratings yet
- Study Ghap4Document40 pagesStudy Ghap4sententialL peetNo ratings yet
- Ocs Engineering & Construction (India) PVT LTD: Quality Assurance DepartmentDocument1 pageOcs Engineering & Construction (India) PVT LTD: Quality Assurance DepartmentvinothNo ratings yet
- Working As A Mechanical EngineerDocument13 pagesWorking As A Mechanical EngineerNikita PawarNo ratings yet
- 01-Steam Power Plant 26 OctDocument64 pages01-Steam Power Plant 26 OcthuusenaliNo ratings yet
- MIP BOHLER DrysystemDocument8 pagesMIP BOHLER DrysystemKarthi KeyanNo ratings yet
- Encapsulated Submersible Motors 4" Product Information and ServiceDocument48 pagesEncapsulated Submersible Motors 4" Product Information and ServiceMartín RománNo ratings yet
- DIN Flange 2502-2503 PDFDocument2 pagesDIN Flange 2502-2503 PDFHeru Agus SetyawanNo ratings yet